
塔康高精度测角及抗野值研究
2014-12-14 01:37彭大国李治安李晓明裴文林
重庆邮电大学学报(自然科学版) 2014年4期
彭大国,李治安,李晓明,裴文林
(空军工程大学信息与导航学院,西安710077)
0 引言
塔康(tactical air navigation system,TACAN)是近程无线电导航系统,可以为飞行目标提供方位和距离信息[1]。塔康测角是方位测量的中心环节,受外界噪声、多径干扰等因素影响,测试数据会不可避免的出现野值。本文通过分析新息的特性,给出野值(outlier)的判定准则,重构状态估计,建立自适应抗野值Kalman滤波模型,并与最小二乘曲线拟合相结合,实现对塔康测角的高精度解算。该测角方法与文献[2]中的方法都具有很高的解算精度,不同的是本文通过最小二乘曲线拟合解算方位,经抗野值Kalman滤波器抑制野值,二者相比较,本文具有抑制野值和抗干扰能力强的优势。
对于抗野值Kalman滤波器的研究,文献[3]提出利用残差序列统计特性进行决策来判断并剔除野值,该方法直接将野值剔除,没有充分利用野值的有用信息。文献[4]提出了利用新息正交性并引入活化函数修正新息的抗野值方法,该方法野值的判定准则未进行定量分析,门限受扰动量ε的影响较大。文献[5]提出了基于模糊控制器的Kalman滤波来抑制野值影响,但抑制效果对模糊控制器模糊规则的依赖性强。本文建立的抗野值Kalman滤波模型,不仅具体推导出判决门限的表达式,并引入压缩影响函数对状态增益进行修正,根据野值偏离程度实现不同程度的抑制,充分利用了野值的有用信息,抗野值性能好,同时不需要观测值的先验统计特性,运算量小,易于工程实现。
1 最小二乘曲线拟合
塔康方位包络信号的表达式为

(1)式中:U为载波信号幅值;f1=15 Hz,f2=135 Hz;m1,m2分别为15 Hz和135 Hz的正弦信号调制度;φ1,φ2分别为15 Hz和135 Hz信号初相。
对包络信号进行采样得到N个数据点{(xk,yk)}(k=1,2,…,N),由于信号表达式形式是已知的,定义5个相互独立的函数{fj(x)}(k=1,2,…,5)就可以拟合出信号,分别为 1,sin(30πt),cos(30πt),sin(270πt),cos(270πt),用 fj(x)的线性组合来拟合 f(x)[6-7],其中,f1(x)=1 用来拟合信号中的直流分量,f(x)的表达式为

(2)式中,cj(j=1,2,…,5)为与函数 fj(x)对应的拟合系数。当拟合误差平方和最小时所得曲线为拟合曲线,拟合误差平方和为

为使 E(c1,c2,c3,c4,c5)的值最小,E 关于 cj的所有偏导都为0,即∂E/∂cj=0。求解得到(4)式

交换求和次序,得到一个关于{cj}的线性方程组:

采用矩阵简化方程为

(6)式中:C=[ c1,c2,c3,c4,c5]T,Y=[y1,y2,y3,…,yN]T

求解(6)式得到:

持续接收塔康包络信号,每接收到N个数据进行一次拟合,求解得到一组系数 c1,c2,c3,c4,c5。c1表示直流分量的系数与测角无关,因此,我们取C=[c2,c3,c4,c5]T。
多次拟合后得到系数矩阵[C1,C2,C3,C4,…],Ci(i=1,2,…)为第i次拟合得到的C。系数矩阵中可能含有野值,因而,将矩阵送入抗野值Kalman滤波器中进行抗野值处理。
2 抗野值kalman滤波器
野值点为严重偏离大部分数据所呈现变化趋势的一小部分数据点[8-9]。含有野值的数据输入 Kalman滤波器会使状态修正出现偏差,造成滤波结果偏离真实状态,产生不利影响,因此,下面提出一种具有抗野值特性的Kalman滤波算法。
2.1 模型的建立
建立模型的量测方程为z(k)=Hx(k)+ξ(k),其中,z(k)为最小二乘拟合出的系数矩阵,作为模型中的量测值;x(k)为状态变量;H为量测4阶单位矩阵,ξ(k)为量测噪声,服从N(0,R)的高斯分布,R为协方差矩阵。建立模型的状态方程为x(k)=Cx(k-1)+Γu(k),其中,C为4阶单位状态转移矩阵;u(k)为4维的系统噪声,服从N(0,Q)的高斯白噪声,Q为协方差矩阵;Γ为噪声驱动。
Kalman滤波模型[10]的状态估计为

在(10)式中引入压缩影响函数对状态增益进行修正,因而,首先要建立适当的判决门限,判断输入数据是否为野值,其次,要选取合适的压缩影响函数,能根据偏离程度的不同实现不同程度的压缩。
2.2 判决门限的确定
门限r的作用是判断量测数据是否为野值。由文献[11]可知,新息可以反映出量测信号的统计特性,利用其特性,详细推导出判决门限的表达式。
新息 w(k)=[w1(k),w2(k),w3(k),w4(k)]T服从4维的正态分布,新息的协方差 G(k)=E[w(k)w(k)T],对 w(k)和wT(k)进行归一化,得到归一化新息及其转置:


归一化新息与其转置相乘得

对(13)式求迹得:

新息为

(15)式中:x(k)为二乘法输出的系数矩阵;v(k)为量测噪声。
由文献[11]可得新息的协方差为

取判决门限r为

(17)式中,

由(12)式、(13)式和(18)式可得:
可以推导出:

因此,我们可以建立如下的判决门限:
r(k)≤χ2α(4),测量值不是野值;r(k)≥χ2α(4),测量值是野值。
χ2α(4)分布置信度为(1 -α)·100%的分位点,本文中 α 取 0.025,查表得 χ2α(4)=11.1433。
2.3 压缩影响函数的确定
在(9)式中引入压缩影响函数Φ(k)对滤波增益K(k)进行修正[12]。本文采用压缩影响函数不是简单的对野值进行剔除,而是充分利用野值的有用信息,根据野值偏离程度实现不同程度的压缩,Φ(k)的表达式为

记Δw(k)为经压缩影响函数Φ(k)修正后的新息,则Δw(k)的表达式为

下面证明引入的压缩影响函数Φ(k)未改变Kalman滤波器的特性。首先证明修正后的新息与原新息的统计特性是一样的。
证:
1)当r(k)≤χ2α(4)时,此时测量值不是野值,Φ(k)=1,修正新息等于原新息,统计特性一致;
2)当r(k)>χ2α(4)时,此时测量值是野值,则:

从上面的证明可知,当野值存在时,修正后的新息与原新息的统计特性是一致的。下面证明改进后的Kalman滤波器的状态估计误差方差矩阵P(k|k)是最小的。
证:


在改进后的Kalman滤波器中,状态估计误差方差矩阵P(k|k)与经典Kalman中的P(k|k)是完全一致的,也就是说改进后的Kalman滤波器的状态估计误差方差矩阵P(k|k)是最小的。
通过上面的2个证明可以知道,引入的压缩影响函数Φ(k)没有改变新息的统计特性,且误差方差矩阵是最小的,故选取的压缩影响函数Φ(k)符合要求。
3 方位确定
由最小二乘法拟合出的系数在经过改进的Kalman滤波器滤波之后输出,其15 Hz正弦初相θ[13]1的确定由表1给出,表1中符号“+”表示该值为正,“-”表示该值为负。

表1 正弦初相的确定Tab.1 Initial phase of the sinusoidal signal
同样根据c4和c5可以得到135 Hz正弦信号初相 θ2。
由 θ1,θ2求方位角为

4 仿真实现与结果分析
4.1 仿真条件
基于CV模型,假设塔康包络信号为

在信号中叠加2%的高斯白噪声和幅度为信号幅度10%的野值,每采集200组数据进行一次拟合,将拟合出的系数分3路分别送入本文采用的Kalman滤波器、文献[8]中采用的Kalman滤波器和普通Kalman滤波器中,输出的系数根据表1和(24)式解算出方位值。
4.2 仿真结果及分析
仿真结果如图1和图2所示。

图1 含野值情况下方位解算值Fig.1 Azimuth values with outlier
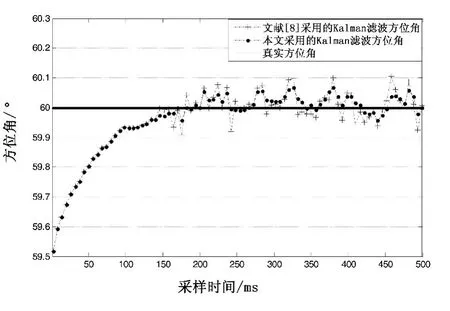
图2 本文与文献[8]的Kalman滤波器解算方位值比较Fig.2 Azimuth values of this paper compared with literature[8]
由图1可知,在野值出现时,本文提出的抗野值Kalman滤波器对野值的抑制作用要明显优于经典Kalman滤波器;由图2可知,本文提出抗野值Kalman滤波器对野值的抑制程度要略优于文献[8]中的Kalman滤波器,但文献[8]中判决门限的确定需要对大量数据进行统计学分析,运算量大大高于本文算法。仿真结果表明,该算法实现了对塔康测角的高精度解算,并能有效抑制野值,具有很高的精度和抗干扰能力。
5 结束语
本文提出的抗野值塔康测角方法能实现塔康方位的高精度解算,设计了一种抗野值Kalman滤波器,引入压缩影响函数修正状态增益,推导出判决门限的表达式,并进行了仿真分析。该方法能很好地抑制野值干扰,实现塔康高精度测角,且算法简单,运算量小,抗干扰能力强,易于工程实现。
[1]张忠兴,李晓明,张景伟.无线电导航理论与系统[M].西安:陕西科学技术出版社,1998.ZHANG Zhongxing,LI Xiaoming,ZHANG Jingwei.The Theory and System of Radio Navigation[M].Xi'an:Shaanxi Science and Technology Press,1998.
[2]张国祥,郭英,霍文俊,等.基于Kalman滤波的塔康方位精确解算方法[J].空军工程大学学报:自然科学版,2013(2):76-80.ZHANG Guoxiang,GUO Ying,HUO Wenjun,et al.Accurate calculating method of TACAN bearing signal based on Kalman filtering[J].Journal of Air Force Engineering University:Natural Science Edition,2013(2):76-80.
[3]刘承香,孙枫.野值存在情况下组合导航系统的容错技术研究[J].中国惯性技术学报,2002,10(6):12-17.LIU Chengxiang,SUN Feng.Fault tolerant on integrated Navigation system when existing outliers[J].Journal of Chinese Inertial Technology,2002,10(6):12-17.
[4]柳海峰,姚郁,卢迪,等.Kalman滤波新息正交性抗野值法研究[J].电机与控制学报,2003,7(1):40-42.LIU Haifeng,YAO Yu,LU Di,et al.Study for outliers based on Kalman filtering[J].Electric Machines and Control,2003,7(1):40-42.
[5]郑梅,程向红,万德钧.模糊卡尔曼滤波器在初始对准抗野值修正中应用[J].中国惯性技术学报,2006,13(6):18-20.ZHENG Mei,CHENG Xianghong,WAN Dejun.Application of fuzzy Kalman Filter in Anti-coarse Value Correction of Initial Alignment System[J].Journal of Chinese Inertial Technology,2006,13(6):18-20.
[6]张浩杰,李晓明,裴文林.基于中频数字化技术的塔康测角方法研究[J].现代防御技术,2012,40(3):67-71.ZHANG Haojie,LI Xiaoming,PEI Wenlin.Angle Measuring of TACAN Based on IF Digital Technique[J].Modern Defence Technology,2012,40(3):67-71.
[7]王伟斌,邱长泉.基于最小二乘曲线拟合的信号调理电路误差补偿方法[J].计算机测量与控制,2009(11):2286-2288.WANG Weibin,QIU Changquan.Compensating error of signal conditioning circuit based on least square curve fitting[J].Computer Measurement and Control,2009(11):2286-2288.
[8]卢迪,姚郁,贺风华.一种抗野值的 Kalman滤波器[J]. 系统仿真学报,2004,16(5):1027-1029.LU Di,YAO Yu,HE Fenghua.Kalman filter restraining outliers[J].Journal of System Simulation,2004,16(5):1027-1029.
[9]GADZHIEV C M.Testing the Covariance Matrix of a Renovating Sequence under Operating Control of the Kalman Filter[J].Automation and remote control,1996,57(7):1046-1052.
[10]付梦印,邓志红,闫莉萍.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2010.FU Mengyin,DENG Zhihong,YAN Liping.The theory of Kalman filtering and its application in navigation system[M].Beijing:Science Press,2010.
[11]李广军,李忠,崔继仁.新型抗野值的Kalman滤波器研究[J].计算机应用与软件,2013,30(1):136-138.LI Guangjun,LI Zhong,CUI Jiren.Research on new Kalman Filter Restraining outliers[J].Computer Applications and Software,2013,30(1):136-138.
[12]高宁,周跃庆,杨晔,等.抗野值自适应卡尔曼滤波方法的研究[J].中国惯性技术学报,2003,11(3):25-28.GAO Ling,ZHOU Yueqing,YANG Ye,et al.Adaptive Kalman filter algorithm with fault-tolerant improvement[J].Journal of Chinese Inertial Technology,2003,11(3):25-28.
[13]王玉林,李艳斌.基于线性组合的塔康方位信号处理[J]. 无线电工程,2006,36(11):38-40.WANG Yulin,LI Yanbin.TACAN bearing signal processing based on the linear combination[J].Radio Engineering,2006,36(11):38-40.
猜你喜欢
黑龙江电力(2022年5期)2023-01-10
电光与控制(2022年4期)2022-04-07
青岛科技大学学报(自然科学版)(2021年6期)2021-12-17
青岛科技大学学报(自然科学版)(2021年4期)2021-07-26
上海航天(2018年4期)2018-09-07
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
兵器装备工程学报(2017年9期)2017-09-28
中国惯性技术学报(2015年1期)2015-12-19
雷达学报(2014年4期)2014-04-23
