4G通信技术在舰船导航信息系统中的应用
2014-12-19 08:35汤昕怡
舰船科学技术 2014年12期
汤昕怡
(南京信息职业学院,江苏 南京210023)
0 引 言
世界主要港口及其附近海域一直是船只碰撞安全事故的多发地,为了提高港口海域航行的安全性,大多数国家建立了船舶交通管理系统(Vessel Traffic System ,VTS),用来管控港口的船舶交通,防止事故的发生。然而,当前研究和应用的重点在于如何避免大型船舶的碰撞和预警,对于小型船舶和渔船的管理,VTS 则显得力不从心。根据 SOLAS(International Convention for the Safety of Life at Sea)的规定,要求500 GT 以上船舶安装自动身份识别(AIS)系统,从而提供船舶自身的身份、位置等信息,对于小型船舶则没有该要求[1-6]。因而近年来如何防止小型船舶和大型船舶的碰撞事故,成为当前关注的主要焦点。以我国宁波舟山港口为例,作为世界最繁忙的商用港口之一,同时也是我国自然条件最好的渔场之一,商船、渔船等多种类型船舶共存,其建设的VTS 系统由于使用门槛较高,同时采用集中管控的模式,存在较大的延迟,对于数量众多的小型船舶以及渔船难以提供高效的导航和通信服务;对于甚高频通信(VHF)来说,使用成本较高,信息传递功能单一,同时在恶劣气象条件下,噪声较多,通信效果较差[2];随着3G 技术的发展,我国的3G 基站信号已经全面覆盖了我国的近海海域,从而为船舶之间的通信提供了一种较为廉价和高效的通信和导航方式,然而需要注意的是,当前我国的3G 标准并不统一,并且在近海环境下,传输速率并不稳定,难以满足船舶信息传递的多维度和导航的实时性要求[3]。
随着4G 技术的兴起,4G LTE 通信技术以其高速率、高带宽、低延迟的特点,迅速占领市场并逐渐取代原先的数据通信技术,近两年来我国4G 基站数量大大增加,4G 通信网的使用成本迅速下降,虽然其覆盖率还未达到2G 与3G 网的水平,然而4G 通信网因其先天优势,最终会在我国得到全面普及。4G 通信技术的诸多优势,使得其一方面能够克服以往船舶导航信息系统时延较大、信息量较少的缺点,另一方面能够有效降低使用成本,从而能够覆盖多种船舶种类和用户群体,解决港口及其附近海域中,船舶的通信、导航及预警等问题。本文对如何利用4G 通信技术实现船舶导航信息系统进行了研究,提出了应用的基本框架和其工作的基本原理,并通过仿真验证了该方法的有效性。
1 导航信息系统基本架构
与3G 通信技术不同,4G 通信采用的核心技术为正交多任务分频技术 (OFDM),可以实现100 Mbps 的下行速率与20 Mbps 的上行速率,并可以实现如无线区域环路(WLL)、数字音讯广播(DAB)等方面的无线通信增值服务。正是因为4G 通信技术具有这样的优势与特性,使得4G 网络不仅仅如3G 网络那样局限于通信领域,而是与卫星网、光纤网等通信网络融合在一起,在文教、卫生、交通等多个领域得到应用。本文提出的基于4G 通信技术的导航信息系统,正是发挥了4G 通信技术独有的优势,不仅能够结合GPS 系统,提供基本的位置、速度、航迹等基本服务,还能够提供视频、组播通信、数字地图等高级功能;不仅能够实现“岸舰”的高速、低延迟通信,还能够实现“舰舰”的实时通信,较之以往船舶中使用的信息导航系统,大大提高了信息的准确性、实时性和功能性。其基本架构如图1 所示。

图1 导航信息系统基本结构图Fig.1 Structure of navigation information system
系统中包含多种信息,需要与其他模块协调工作从而完成整个信息交换和导航功能,因而需要开发相应的接口,从而调用雷达、GPS 信息等,实现信息的融合,向船舶提供全维度的导航与通信功能。这类接口分为2 种,一种为软件接口,如GPS 位置服务接口等,此类接口大多数已经得到开发并实现商业应用,对软件接口的分析可见文献[4];一种为硬件接口,需要根据硬件的主要类型来决定,目前还处于进一步的开发过程中。
该系统框架相较于传统的导航信息系统具备以下优点:
1)通过4G 通信网,能够将原先各个独立的信息采集与交换系统融合起来,实现多维的信息传递与描述;
2)使用4G 通信网,克服之前VTS 中只能够实现集中化管控的劣势,可以实现船舶互相之间的协调和通信;
3)随着4G 通信技术的普及,使用该系统的成本必将持续下降;
4)当前智能手机等移动4G 终端功能强大,技术成熟,大大降低了本系统的实现难度。
2 导航信息系统参数的确定
在船舶的导航和预警过程中,有若干参数可以用来衡量船舶碰撞的可能性大小和危险程度。在本文中,主要利用2 个参数:碰撞可能性参数和碰撞危险性系数。其中碰撞可能性参数,通过分析船舶的航行方向、速度等,判断其是否有航迹重叠的可能,是否有碰撞的可能;碰撞危险性系数指的是,当已经判断有碰撞的可能性之后,在多长的距离以及多短的时间内,采取规避动作安全。通过这2 个参数,能够使得本文提出的系统,对附近海域的多个目标进行筛选,发现可能发生碰撞的,并在合适的时间和距离内实施规避动作,从而有效避免事故的发生。
2.1 碰撞可能性参数
设定当前船舶的运行方向为正方向,令p 为碰撞可能性参数。当p=0 时,则认为不可能碰撞;当p=1时,则认为必然发生碰撞;当p 为其他值时,可能发生碰撞。
首先引入方向参数d,用来判断两船舶的航迹是否可能重合。当d =1 时,可能会重合;当d =0 时,不可能重合,则建立如图2 所示的坐标系。

图2 船舶航行坐标系图Fig.2 Coordinate system diagram of sailing
其中a 为当前船舶Ship - A 相对于对方船舶Ship-B 的相对角,b 为Ship -B 的航行角,则可根据获得如下结论:
d = 1,当且仅当
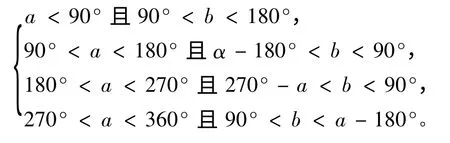
则令Ship - B 所在坐标 为(x,y),方向向量为b,速度为vb,其速度在2 个方向上的分量分别为vx和vy,则可得以下函数:

则可得碰撞可能性参数为:

2.2 碰撞危险性参数
根据以往的研究,在视野良好的情况下,两船的安全距离为4 n m;在视野糟糕的情况下,两船的安全距离为6 n m,假设两船的速度分别为矢量a 和矢量b,则令a′和b′分别为其速度矢量在相向方向上映射的分量,则其分别为角度a 和b 的函数。则可计算最短安全时间为:

根据上式和行驶的速度,易得最短安全距离SAD,通过文献[8 -9]的研究,在此引入衡量参数k,其中k 越高说明碰撞的几率越高:

其中ρ 和σ 分别为最短安全距离和时间的衡量参数。在不同的情景中,可以对其采用不同的取值,例如当船舶从左舷穿过时,可取σ =0.5,ρ =5,相关的研究成果在文献[9]中得到了验证。
通过以上2 个参数,则可以对船舶的碰撞可能性与危险性进行判断,从而为船舶的导航和预警提供依据。
3 系统的仿真与实现
在系统的实现和仿真过程中,首先采用软件方法在4G 智能终端上实现了该系统的功能,并利用相关的信息验证了文章提出系统框架的可行性。之后,根据实际的应用场景,设置相应的环境参数,利用数值运算和分析的方式对基于4G 的信息导航系统运行效率进行测试,最后证明本文提出的方法具有一定的高效性。
首先需要确定系统传递信息的数据结构,如表1 所示。

表1 系统传递信息的数据结构Tab.1 Data structure of the system of information transmission
根据以上数据结构,基于Android 4.3 平台开发了相应的实验程序,结合常见的电子地图应用则可以对本文的系统进行验证,
通过图3 可以看出,在电子地图上,可以清晰地显示出对方船舶的位置,并能够计算出相应的p值和k 值,对本船进行导航和预警。初步验证了本文提出方法的有效性。

图3 在GIS 系统中仿真图Fig.3 Simulation in GIS system
然后,选择几种较为常见的通信方式作为比较,考察本文提出方法在不同环境下工作的效率。
采用CDMA 和VHF 作为模拟对比对象,通过在不同的信道衰减条件下,模拟不同的通信环境,从而检测本文提出方法的可靠性,测试的结果如图4所示。
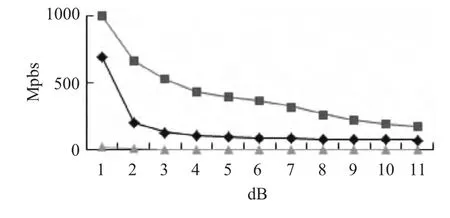
图4 不同信道衰减测试结果Fig.4 Different channel attenuation test results
从以上数值模拟结果可以看到,随着信道衰减的增加,各种通信方式的可用带宽都有了明显的下降,然而4G 通信相较于另外2 种常用的通信方式,在较恶劣的环境下,仍能够保持较高的可用带宽,基本能够满足系统工作所需要的带宽要求。
4 结 语
本文通过分析当前船舶导航信息系统的主要问题和需求,结合当前信息通信技术的发展,提出了一种基于4G 通信技术的导航信息系统,并给出了系统的基本结构和主要参数,通过软件仿真和数值模拟,证明了与传统方法相比,本文提出的方案具有一定的优势、可行性和高效性。
然而,目前我国的4G 基站建设还在如火如荼的进行中,虽然增长很快,但还未能覆盖我国大部分的近海海域,因而本文提出的方法暂时还不具备立即投入实用的条件,同时,对于其他船舶用信息系统,如VTS、AIS 等,如何将它们融合入本文的系统结构中,还需要进一步研究和开发相应的接口。
[1]MAKIKO MINAMI,JUNJI FUKUTO,YASUYUKI NIWA.Study on navigation integration exchange support system with AIS[J].Japan Institute of Navigation 120,2008(3):389 -391.
[2]Japan coast guard current status and measures for marine accident 2012[M].Tokyo:Husakio Press,2007:25 -48.
[3]MAKIKO MINAMI. The statistics and analysis of fishing boats in East Sea in first quarter of 2012[EB/OL].http://www. dhyzchina. gov. cn/article. asp?news _ id=10043.
[4]KOJI MURAI,SHEN Guang-wei,YUJI HAYASHI. Comments on marine accidents of ningbo port[M]. Ningbo:Zhejiang Press,2011:355 -389.
[5]IMO regulation 19 of SOLAS Chapter V[S].
[6]The government of Zhoushan city,(2011). Survey report of the accident between shipping boat and merchant ship in Zhoushan region[M]. Ningbo:Zhejiang Press,2011:663-678.
[7]Hironobu FURUYA SKY Perfect JSAT Launches Ocean BB(maritime VSAT broadband service)[J]. Navigation 174,2010(4):53 -54.
[8]KEARON J.Computer programs for collision avoidance and traffic keeping conference on mathematical aspects on marine traffic[M]. London:Aeademic Press,1997:223-246.
[9]WENG Jian-jun. The research on change regulation of DCPA and TCPA to give best collision avoidance[D].Wuhan:Wuhan University of Technology,2004.
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
船舶(2021年4期)2021-09-07
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2018年11期)2018-08-04
消费导刊(2017年20期)2018-01-03
军工文化(2017年12期)2017-07-17
中华手工(2017年2期)2017-06-06
中国船检(2017年3期)2017-05-18
现代计算机(2016年11期)2016-02-28
中外会展(2014年4期)2014-11-27