
浮动车数据和视频传感器数据的融合算法分析
2014-12-23 01:21单丽萍兰时勇张建伟
计算机工程与设计 2014年3期
单丽萍,兰时勇+,张建伟
(1.四川大学 计算机学院,四川 成都610065;2.四川大学 视觉合成重点学科实验室,四川 成都610045)
0 引 言
多源异构交通信息融合是智能交通系统(ITS)关键技术之一,实时、全面、准确的交通信息是ITS 重要的基础。国内外学者围绕多种交通检测器信息融合开展了大量的研究工作,文献[1,2]研究了神经网络、卡尔曼滤波、模糊理论等多种融合方法,文献[3-7]讨论了BP 神经网络融合方法;文献[8,9]讨论了粗糙集的融合方法;文献[10,11]分别分析了行程时间预测的可靠性及浮动车可靠性,但这些文献大多缺乏对数据融合的可靠性分析。
为了解决数据融合的可靠性分析问题,文章借鉴GARCH 思想,分别采用两种融合算法融合以空间序列为特点的浮动车数据和以时间序列为特点的视频传感器数据,通过分析并比较误差的标准差判断融合的可靠性。
1 GARCH 模型
1.1 广义自回归条件异方差 (GARCH)
GARCH 模型的基本思想是指在历史信息集下,某时刻的噪声服从均值为零、方差为过去有限项噪声值平方的线性组合的正态分布。
GARCH(p,q)模型为

式中:常数α0,αi,βj 均为非负数,——t-i时刻的误差平方,为t-j时刻的GARCH误差方差,p 是GARCH 项的阶数,且p≥1,为ARCH 项的阶数,q≥0。
1.2 构建GARCH 模型
构建GARCH 模型的主要步骤包括:①建立均值方程,得到误差序列;②检验模型的误差是否含有ARCH 效应;③如果存在ARCH 效应,构建GARCH 模型。
(1)建立均值方程,得到残差序列:均值方程可以为BP神经网络方法、平均值法、时间序列方法等,最小二乘法等,分别建立真值与融合速度、浮动车速度、视频传感器采集的车辆速度的均值方程,得到误差序列。
(2)ARCH 效应检验:采用拉格朗日乘数检验即ARCH LM 检验方法检验模误差序列是否含有ARCH 模型效应。
ARCH LM 检验的具体步骤如下:
构建误差平方序列

假设检验
原假设:误差平方序列中直到r阶都不存在ARCH 效应,即

对立假设:误差平方序列中直到r阶都不存在ARCH效应,即

检验统计量:LM=T*R2,即观测值个数T 乘以回归检验的R2。
如果假设检验p∈[0,0.05],即小于显著水平0.05,则拒绝原假设,存在ARCH 效应;相反,接受原假设,不存在ARCH 效应。
(3)建立GARCH 模型:GARCH 模型的阶数通过ARCH LM 检验结果确定。如果ARCH LM 检验显示误差平方序列存在低阶ARCH 效应,则相应的低阶GARCH 模型被采用。相反,则相应的高阶ARCH 模型被采用。采用极大似然法求解GARCH 模型的参数。
2 模型验证与分析
模型验证数据来源于成都市红星路二段2012年3月27日7:30-11:30期间、分析周期为1 min 的240组浮动车速度和视频传感器采集的车辆速度。
2.1 数据预处理和时空配准
在数据预处理方面,修改错误数据、删除重复数据、弥补缺失数据等预处理方法处理冗余数据,为数据融合提供精确数据,提高数据融合算法的精度。
其中,采用主元分析(principal component analysis,PCA)与BP神经网络相结合的方法依据历史数据和交通数据弥补缺失数据。核心思想:相邻路段的数据作为输入,输出结果作为弥补的数据。即利用PCA 在保持主要信息的情况下减少数据维数,避免复杂的计算的情况下,将PCA得到的数据作为BP神经网络的输入,使用3层神经元,输出即为弥补的缺失数据。
在时间匹配方面,根据视频传感器数据的时间段选择浮动车数据;在空间方面,确定两种数据来源于同一路段。
2.2 基于联合卡尔曼滤波的速度融合及可靠性分析
2.2.1 联合卡尔曼滤波算法
联合卡尔曼滤波算法具有两级滤波结构,即若干个子滤波器和主滤波器。各个子滤波器独立进行时间更新和测量更新,同时采用方差上界思想消除子滤波器间的相关性[12];主滤波器进行时间更新和融合各子滤波器的结果,依据统一的信息分配原则,将全局状态估计信息和系统噪声信息反馈给各子滤波器。根据上一时刻的最优估计状态值和此时刻的测量状态值估计此时刻的最优状态值。
2.2.2 多源异构速度融合
采用3个子滤波和1个主滤波的联合卡尔曼滤波融合浮动车速度和视频传感器速度,其中,110个浮动车速度、浮动车样本量、视频传感器速度作为输入,融合后的速度作为输出。融合后的速度、浮动车速度、视频传感器速度如图1所示。
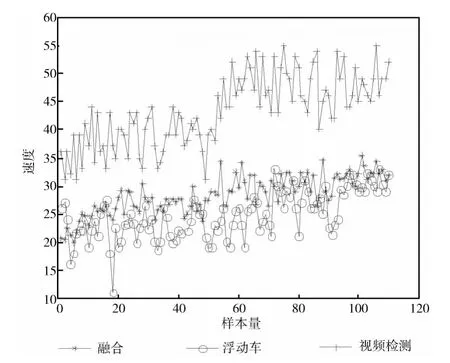
图1 融合、浮动车、视频传感器速度
2.2.3 融合可靠性分析
融合速度与浮动车速度、融合速度与视频传感器速度之间的误差序列分别如图2、图3所示。从图中可以看出,误差序列存在波动现象,在某段时期内波动较小,另一段时期内波动相对较大,这说明误差序列可能存在异方差性。
接下来进行融合速度与浮动车速度间误差序列的ARCH LM 检验,如式(2)所示,经计算得,当r=1 时,相应的p值为0.035,小于显著性水平0.05,拒绝原假设,存在一阶ARCH 效应。当r取值从2到10变化时,相应的p值均大于显著性水平0.05,接受原假设,不存在ARCH效应。经ARCH LM 检验可知,融合速度与目标样本速度的误差序列存在一阶ARCH 效应。且q=1,p=1,采用GARCH(1,1)模型,经计算得到如下方程
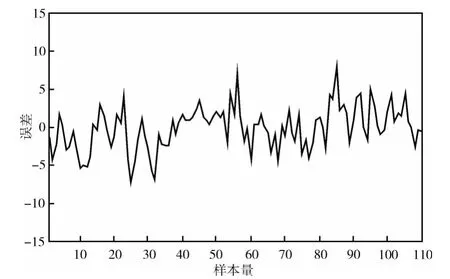
图2 融合速度与浮动车速度误差序列
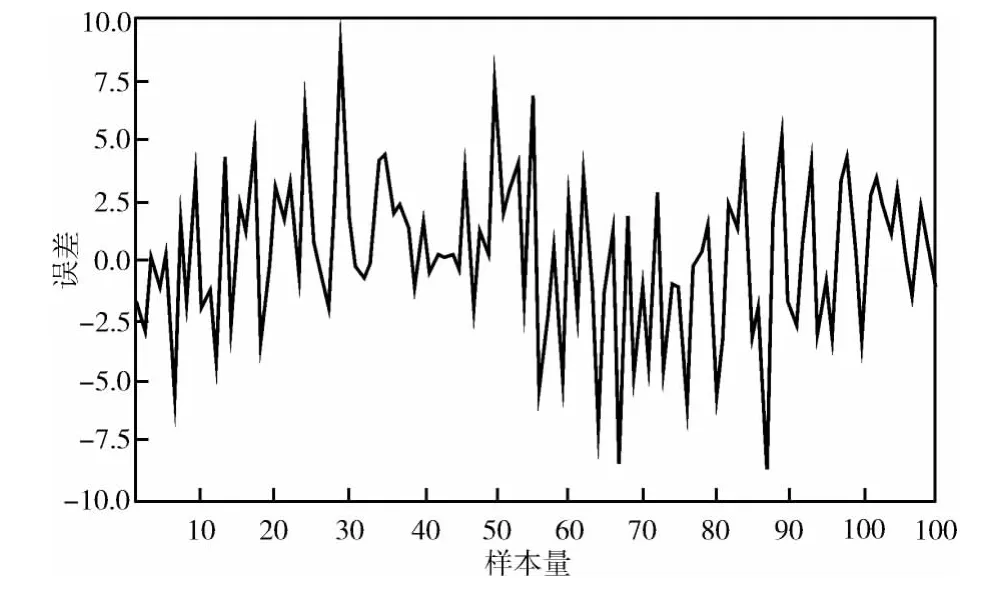
图3 融合速度与视频传感器速度误差序列

同理,融合速度与视频传感器速度间误差的GARCH(1,1)模型为

分别计算方程(3)、方程(4),可得到误差的标准差,如图4、图5所示。从图中可以看出,标准差的取值以及误差值偏离误差平均值的程度。图4的标准差的取值大部分落在[2.3,3.4]之内,图5的标准差的取值大部分落在[2.8,3.5]之内。
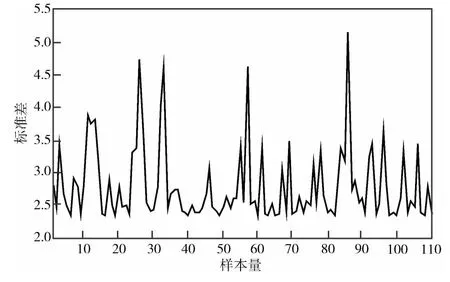
图4 融合速度与浮动车速度的误差标准差
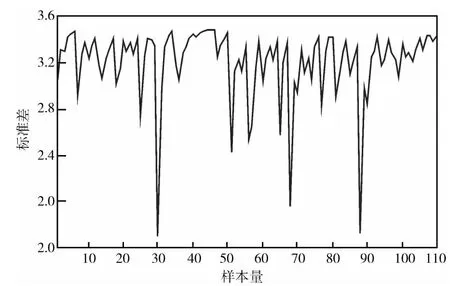
图5 融合速度与视频传感器速度的误差标准差
2.3 基于BP神经网络的速度融合及可靠性分析
2.3.1 BP神经网络
BP(back propagation)神经网络,是基于误差反向传播的多层前馈网络,包括三部分:输入层、隐含层和输出层。其中,输入层负责接收输入信息,并将信息传递给隐含层;隐含层通过激励函数进行信息变换,将变换后的信息传递给输出层;输出层处理来自隐含层的信息,并将处理后的信息作为结果进行输出。
BP神经网络包括前向传播和后向传播两个过程,前向传播主要计算隐含层和输出层的输入和输出;当实际输出和期望输出不相符合时,进入后向传播,逐层修正权值和阈值,直至学习次数达到预先设定的为止或输出的结果可以接受为止。
2.3.2 多源异构速度融合
采用三层BP神经网络融合浮动车速度和视频传感器速度,隐含层神经元的个数为7,其中,浮动车数据中110个满足文献[7]中给出的成都市主干道最小浮动车样本量是数据作为目标样本,剩余数据中的110个浮动车数据、浮动车样本量、视频数据作为BP神经网络的输入。融合速度、浮动车速度与视频传感器速度如图6所示。
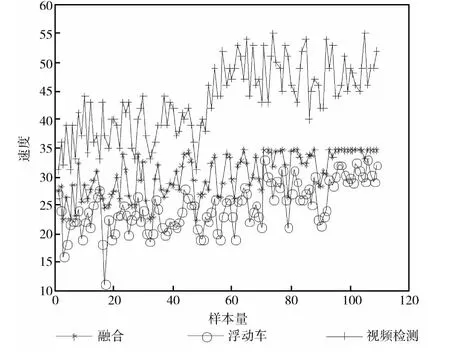
图6 BP融合、浮动车、视频传感器的速度
2.3.3 融合可靠性分析
如3.2.2构建GARCH 模型过程类似,构建融合速度、浮动车速度与误差序列,进行ARCH LM 检验、构建GARCH 模型。经ARCH LM 检验,只有当r=1 时,p=0.0025,小于显著性水平0.05,拒绝原假设,存在一阶AECH 效应。且q=1,p=1,采用GARCH(1,1)模型,具体方程为

同理,融合速度与视频传感器速度间误差的GARCH(1,1)模型为

图7至图10分别为融合速度与浮动车速度、视频传感器速度间的误差序列及误差的标准差图,从图9、10中可以看出,图9的标准差的取值大部分落在[3.2,4.0]之内,图10的标准差的取值大部分落在[3.0,6.0]之内。
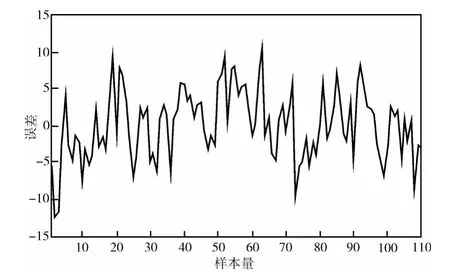
图7 融合速度与浮动车速度误差序列
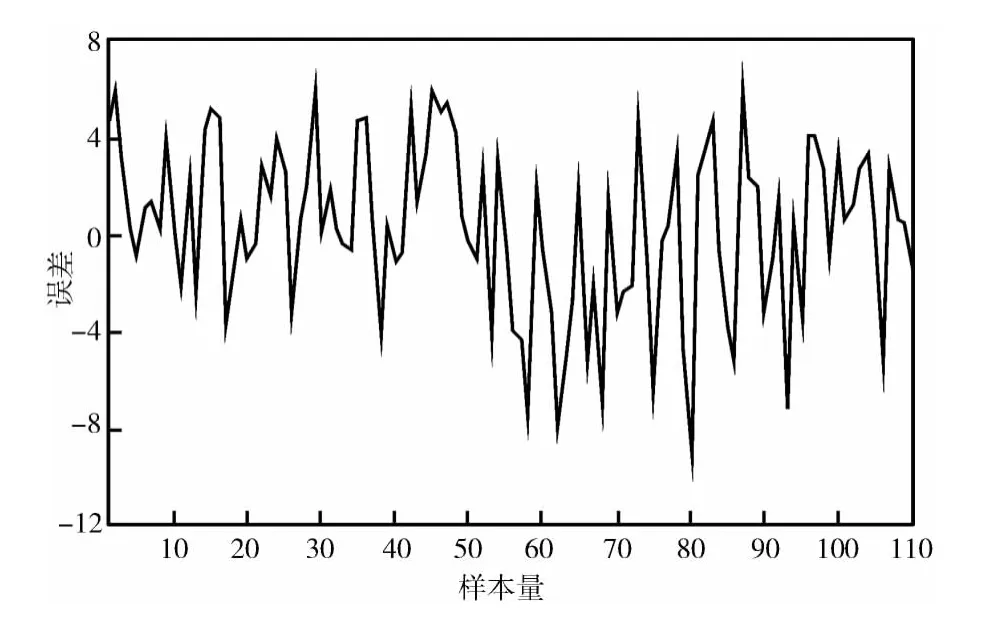
图8 融合速度与视频传感器速度误差序列
比较分析图4、图5、图9、图10,可得,联合卡尔曼滤波融合算法得到相关标准差大部分取值落在[2.3,3.4]、[2.8,3.5]之内,BP 神经网络融合算法得到的相关标准差大部分取之落在[3.2,4.0]、[3.0,6.0]之内。前者的标准差明显小于后者的标准差,标准差越小,误差值偏离其平均值就越小,数据越接近真值,即数据越可靠。与BP神经网络方法相比,基于联合卡尔曼滤波算法融合的速度更加可靠。
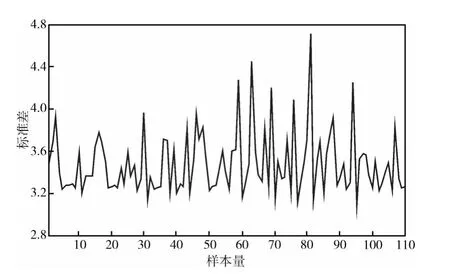
图9 融合速度与浮动车速度的误差标准差
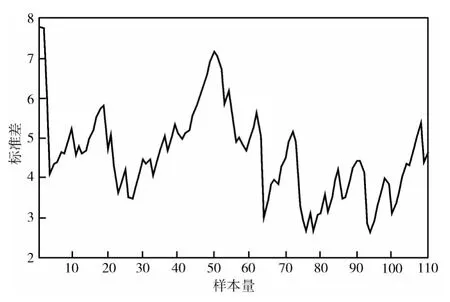
图10 融合速度与视频传感器速度的误差标准差
2.4 结果分析
根据数据验证得知,与BP神经网络方法相比,基于联合卡尔曼滤波算法融合的速度更加可靠。联合卡尔曼滤波算法采用误差协方差和噪声方差反馈思想,BP神经网络算法采用误差反馈思想。由图6 可知,当样本量大于96 以后,融合速度趋于平稳。出现这种情况的原因主要有两个:陷入局部极小值而得不到全局最优和隐含层节点的选取缺乏相关理论指导。
BP神经网络方法的权值调整以误差梯度下降为原则,多数极小点往往是局部极小并非全局极小,即使是全局极小也并非唯一,训练经常陷入某个局部极小点,无法收敛于给定误差。再次,在训练网络时,本文根据大量试验结果选取隐含层节点,隐含层节点的选取缺乏理论指导。此两种因素影响BP神经网络方法的融合效果,导致融合的可靠性降低。
3 结束语
文章借鉴GARCH 思想,以误差的标准差为融合算法的可靠性评判依据,为融合算法的可靠性评估提出了一种依据,具有一定的意义。文章采用BP神经网络融合算法和联合卡尔曼滤波融合算法融合浮动车数据和视频传感器数据,建立GARCH 模型,进行ARCH LM 检验,分别比较融合后的数据和单一数据源的误差的标准差的分布及取值范围,进而判断融合算法的可靠性。经实验验证,基于联合卡尔曼滤波融合的交通速度更可靠。此外,文章分析了BP神经网络融合算法中存在的不足。
[1]Chris Bachmann,Baher Abdulhai,Matthew J Roorda,et al.Acompar-ative asseassment of multi-sensor data fusion techniques for freeway traffic speed estimation using micro simulation modeling [J].Transportation Research Part C:Emerging Technologies,2013,26:33-48.
[2]Peng Depin,Wu Jianping,Wang Chunlu,et al.A robust Kalman filter based on data fusion method for traffic speed estimation [C]//Proceedings of the Conference on Traffic and Transportation Studies,2010:937-947.
[3]Peng Wenglong,Jia Limin,Liu Liangping,et al.The traffic information fusion method based on the multisource detectors[C]//24th Chinese Control and Decision Conference,2012:162-171.
[4]LIU Liangping.Research on the traffic information fusion with the multisource detectors [D].Beijing:Beijing Jiaotong University,2012 (in Chinese).[刘亮平.基于多源检测器的交通信息融合方法研究 [D].北京:北京交通大学,2012.]
[5]Yang Menglong,Liu Yiguang,You Zhisheng.The reliability of travel time forecasting [J].IEEE Transactions on Intelligent Transportation Systems,2010,11 (1):162-171.
[6]GUAN Yali.Analysis on the reliability of Chengdu taxi floating car date[D].Chengdu:Southwest Jiaotong University,2010(in Chinese).[管亚丽.成都市出租车浮动车数据可靠性分析[D].成都:西南交通大学,2010.]
[7]ZHANG Xu.Fusion of multisource heterogeneous traffic flow data for the assessment of traffic operational conditions [D].Beijing:Beijing Jiaotong University,2008 (in Chinese). [张旭.面向交通运行状态评价的多源异质交通流数据融合技术方法研究 [D].北京:北京交通大学,2008.]
[8]Dong Hongzhao,Zhou Min,Chen Ning.A New traffic datafusion approach based on evidence theory coupled with fuzzy rough sets[J].Communications in Computer and Information Science,2011,86:444-451.
[9]Chen Lin,Wei Shutao,Shi Linxiang.Traffic status estimate based on data fusion [C]//2nd International Conference on Education Technology and Computer,2010:144-146.
[10]Hussein Dia,Kim Thomas.Development and evaluation of arterial incident detection models using fusion of simulated probe vehicle and loop detector data,information fusion [J].Information Fusion,2011,12 (1):20-27.
[11]Kong Qingjie,Li Zhipeng,Chen Yikai.An approach to urban traffic state estimation by fusing multisource information[J].IEEE Transactions on Intelligent Transportation Systems,2009,10 (3):499-511.
[12]HAN Chongzhao,ZHU Hongzhao.Multisource information fusion [M].Beijing:Tsinghua University Press,2006 (in Chinese). [韩崇昭,朱洪燕.多源信息融合 [M].北京:清华大学出版社,2006.]
猜你喜欢
军民两用技术与产品(2022年8期)2022-10-10
中国外汇(2019年19期)2019-11-26
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
重型机械(2016年1期)2016-03-01
海军航空大学学报(2015年4期)2015-02-27
医学理论与实践(2014年5期)2014-03-06
医学理论与实践(2014年23期)2014-03-06
