
基于RSSI值的WSNs节点测距算法改进与定位实现*
2014-12-31 12:18信召建郭茂林
传感器与微系统 2014年6期
信召建,胡 屏,王 玲,郭茂林,王 翥
(1.哈尔滨工业大学(威海)信息与电气工程学院,山东威海 264209;2.威海嘉茂电子科技有限公司,山东 威海 264209)
0 引言
在无线传感器网络[1](wireless sensor networks,WSNs)中,节点定位是WSNs应用的基础,很多情况下传感器节点须明确自身位置才能为用户提供有用的信息,实现对目标的定位和追踪。定位算法是定位系统的核心,很多学者进行了深入的研究。定位算法根据是否需要测量节点间的距离可划分为基于测距的定位算法和免于测距的定位算法[2]。一般来说基于测距的定位算法定位精度较高,而免于测距的定位算法侧重于网络的联通性,偏向于对位置的估计。
为了获取较高的定位精度,基于测距的定位算法备受关注。在WSNs信号传输过程中接收信号强度指示(received signal strength indication,RSSI)是衡量通信链路质量的一个重要指标,在不增加硬件成本的前提下,由于RSSI值很容易测量到,所以,很多学者针对它做了比较深入的研究,同时也提出了很多基于RSSI值的距离测量方法和修正方法[3],通过测量到的RSSI值来建立RSSI值与距离d之间的关系。文献[4]介绍了无线信道的衰减模型,系统地阐述了最常用的自由空间传播损耗模型和对数—常态分布模型。文献[5]对室内信道模型进行了测试,并对参数进行了分析。对于基于距离的定位算法,在进行定位时通常采用的是三边测量法[6],而距离d的准确性直接影响到定位的精度,因而建立准确的RSSI测距模型显得尤其重要。在实际环境中由于节点布设高度不同,地面对无线信号的反射与吸收以及环境噪声等因素都有所不同,所以,并不存在固定的适用于所有环境的测距模型,目前常用的一些测距模型都是在理想条件下测取的。如果把这些模型直接应用到实际环境中,必然造成定位结果出现误差。基于上述考虑,本文对实际环境进行了测试,分析了一定环境下节点布设的高度与测距模型建立之间的关系,同时对一定距离d上获取的RSSI值进行了分析,运用分段拟合与移动校验法建立RSSI值与距离d的模型,使之更准确的反映RSSI值与距离d的关系,同时将测距模型应用到WSNs定位系统中进行了验证。
1 测距模型的建立与分析
1.1 不同高度测取的RSSI值与距离d的关系
在测取RSSI值与距离d的关系时,首先固定一个传感器节点,该节点称为锚节点。锚节点是进行距离测量的基准点,然后沿某一方向移动另外一个传感器节点,此节点定义为未知节点。通过未知节点的等距移动来测量未知节点到锚节点的RSSI值,从而建立RSSI值与距离d的关系。为了建立准确的测距模型,在保证未知节点和锚节点的供电电池电压不低于3.3 V[7]前提下,在实际环境中针对节点布设的高度做了如下实验:
在比较空旷的广场上,尽量选择无人时进行实验,周围异物到节点通信直线路径的距离大于等于3 m,保证测取RSSI值的2个节点之间没有障碍物阻隔。将2个节点用支架固定在高度1.1 m的同一水平面上,天线直立朝上,每隔0.5 m进行一次测量,所得RSSI值与距离d的关系曲线如图1(a)所示。
在与上述实验条件相同的情况下,只改变节点的高度,将节点放置在0.5 m高度进行测量,测得的RSSI值与距离的关系如图1(b)所示。
在上述实验条件下,将节点直接放置在地面上进行测量,得到RSSI值与距离d的关系图如图1(c)所示。
由图1(a),(b),(c)可以看出节点在不同高度测得的RSSI值与距离d之间的关系差异很大,可以看出随着节点高度的变化RSSI与距离d呈非线性变化。从图1(c)中可以发现在地面进行RSSI值测试时,节点的通信距离很短,在信号传播过程中,广场地面对信号吸收很大,造成信号迅速衰减。由图1(b)和图1(c)可知节点在高度0.5 m和0 m处测得的RSSI值曲线波动较大,不适合进行RSSI值测距分析。从图1中可以看出节点高度1.1 m时,在15 m范围内RSSI值的下降趋势线性比较明显,距离越远RSSI波动较大,利用RSSI值比较适合近距离测距定位。

图1 不同节点高度时,RSSI值与距离d的关系图Fig 1 Relationship between RSSI value and distance d at different node height
1.2 利用分段处理方法分析RSSI值与距离d的关系
从WSNs节点在不同的高度测取的RSSI值与距离d之间的曲线关系可以看出,节点在高度1.1 m且通信距离在15 m内所测取的曲线值比较平滑,通信距离大于15 m后RSSI值波动比较大,在进行距离测量时误差较大。而在0.5 m高度时,通信距离大于5 m后就出现了很大波动,地面测试的效果通信距离更短,鉴于以上分析,本文着重分析节点高度1.1 m,且节点通信半径限制在15 m范围的情况。既保证了一定的通信范围,又能进行较好的曲线拟合来降低误差,并且能减少了锚节点布设的成本。
对于测量数据利用最小二乘法[8]将2~15 m之间的RSSI值与距离d之间的曲线拟合出来,如图2所示。
在图2中①代表原始曲线,②线代表拟合后的曲线,不难发现在原始曲线上8~13 m之间的一个RSSI值在进行距离计算的时候会对应2~3个的距离,而利用对数方程进行最小二乘拟合后,虽然得到的拟合曲线是单调的,消除了一个RSSI值对应多个距离的效果,但这反映不出真实的测量结果,必然会造成很大的误差。
由常规曲线拟合图2可以求取RSSI值的误差如表1所示。
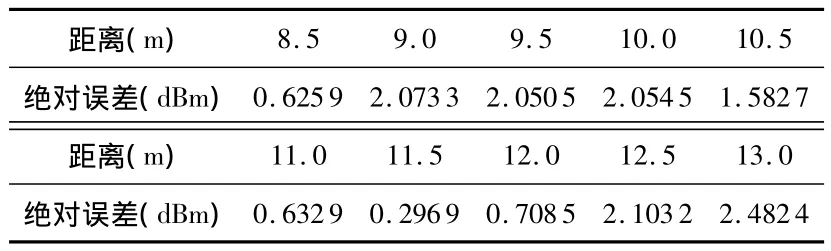
表1 常规曲线拟合RSSI值误差Tab 1 Error of conventional curve fitting RSSI value
从上表可以计算得出8.5~13 m内的RSSI值均方根误差(RMSE)为1.4611 dBm。
本文在主要考虑精确度的前提下,为了使误差最小,采用分段拟合的方法将原始曲线分成3段来处理:2~8.5 m,8.5~13 m,13~15 m。其中2~8.5m 和13~15m 由于曲线成单调性直接利用对数拟合即可;而8.5~13 m由于其波动性较大,采用三次函数来进行拟合。拟合曲线如图3所示。

图3 8.5~13m段拟合曲线Fig 3 Fitting curve at period of 8.5~ 13m
图3中拟合曲线方程为

从分段拟合曲线图3求取RSSI值的误差如表2所示。

表2 分段曲线拟合RSSI值误差Tab 2 Error of segmentation curve fitting RSSI value
分段三次函数拟合的RMSE为0.1445,与常规曲线拟合相比减小了1.3166。可以看出:常规曲线拟合对距离的测量产生很大的误差,同时针对三次拟合函数段出现一个RSSI值对应几个距离d的问题,本文采用了如下方法进行校验:
1)设定一个未知节点的移动趋势即方向,以0.5 m为步长进行移动,同时每移动一次步长采集一次信号强度RSSI值。
2)对采集到的RSSI值进行分析,对比三分段拟合曲线图来检测RSSI值是否落在单调分段区间,如果是,即可确定现在的距离d,同时可以校正出前几次移动步长的距离测量值;如果RSSI值未落在单调区间内,重复步骤(1)。
1.3 测距验证
在研究过程中,在高度1.1 m处布设2个节点A与B来进行测试,A节点是未知节点,B节点是锚节点,2个节点的通信半径设置为15m,设初始时刻A到B的距离为10m,待定位节点的趋势方向如图4中箭头方向。步长设置为0.5 m,每经过一次步长测量一次RSSI值。

图4 节点布设图Fig 4 Node layout diagram
根据AB初始距离为10 m,可知其准确测量的RSSI值为-57 dBm,利用常规曲线拟合的时候RSSI值为-57 dBm对应距离为12.3673 m,误差2.3673 m,可由常规拟合曲线公式(1)求得

利用分段拟合方法处理时,由于初始距离对应的RSSI值为-57 dBm,用RSSI值反推距离时,对应的距离d不唯一,所以,采用本文提出的方法进行校验,测取移动一个步长后A1点,A1点到B距离为 9.5 m,对应 RSSI值为-56.5 dBm,对应的距离d也不唯一,继续移动步长,当移动到A3时,此时RSSI值为-54 dBm,RSSI值落在与距离d呈单调关系的区间内,此时可计算出距离d。精确的距离为8.5 m,利用本文分段拟合算法,根据RSSI值测取的距离为8.49 m,与实际距离的误差0.01 m。
应用常规曲线拟合,所得位置与距离d的相对误差如表3所示,相对误差r由公式(2)求取

其中,d为距离的精确值;d量为距离的测量值。

表3 常规曲线拟合相对误差Tab 3 Relative error of conventional curve fitting
利用本文所提出的算法求取的4个位置与距离d的相对误差如表4所示。

表4 校正算法相对误差Tab 4 Relative error of correction algorithm
根据表3和表4,以曲线图的形式绘制相对误差对比图如图5所示,从图中可以看出:应用本文所提出的校正算法从精确度上明显优于传统的常规曲线拟合方法。就相对误差而言有了很大改善,在一些位置的最大改善比例可达20%以上。

图5 相对误差对比图Fig 5 Comparison chart of relative error
2 定位实现
传统的基于RSSI的定位算法[9]是对测量得到的RSSI值直接代入最小二乘拟合公式中求得节点间的距离,然后融合一些数学方法,如极大似然估计法来实现节点的定位。
本文将分段拟合与移动检验的测距改进算法应用到WSNs定位系统中来实现定位算法的改进,定位算法流程图如图6所示。

图6 分段校验改进算法流程图Fig 6 Flow chart of subsection calibration improved algorithm
本文针对提出的改进算法与传统的基于RSSI定位算法进行了仿真,在60m×60 m的一个区域内均匀布设了36个锚节点,然后随机部署了30个待定位节点,利用改进算法和传统算法分别对待定位节点进行定位,定位仿真图如图7所示。其中,黑点代表待定位节点的真实坐标,圆圈代表传统RSSI定位算法的定位坐标,+代表改进算法的定位效果。黑点和圆圈、+号之间的连线代表定位的绝对误差。
改进算法与传统RSSI定位算法的定位误差对比图如图8所示。从图中可以看出:采用本文提出的测距改进算法来实现WSNs定位时,与传统定位算法相比,定位误差有了明显的改善,一定程度上反映了改进算法的优越性,同时改进算法还可以实现实时定位。
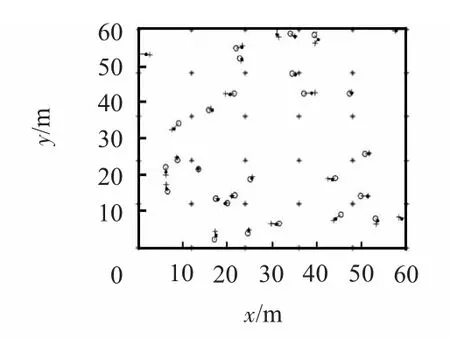
图7 传统RSSI定位算法与改进算法定位仿真图Fig 7 Simulation diagram of traditional RSSI and improved algorithm positioning

图8 定位算法误差对比图Fig 8 Error contrast figure of localization algorithm
3 结论
本文分析了一定环境下,无线传感器节点在不同高度放置时RSSI值与距离d之间的关系。采用了分段拟合的方法处理RSSI值与距离d的关系,并与传统常规拟合曲线进行了比较,利用移动趋势恒定步长的方法来校正距离,验证结果表明,该算法能极大的降低距离测量的相对误差;同时将测距改进算法应用到WSNs定位系统中,实现了定位算法的仿真,并与传统算法进行了比较,结果表明,改进算法能明显改善定位误差。
[1]Yick Jennifer,Mukherjee Biswanath,Ghosal Dipak.Wireless sensor networks survey[J].Computer Networks,2008,52(12):2292-2330.
[2]Nissanka B,Priyantha,Hari Balakrishnan.Anchor free distributed localization in sensor networks[R].Cambridge:MIT Laboratory for Computer Science,2003:462-464.
[3]Zheng Jungang,Wu Chengdong,Chu Hao,et al.Localization algorithm based on RSSI and distance geometry constrain for wireless sensor networks[C]//Proceedings of International Conference on Electrical and Control Engineering(ICECE),2010:2836-2839.
[4]郭瑞星.基于Zig Bee的无线传感器网络RSSI定位算法的改进与实现[D].太原:太原理工大学,2011.
[5]张先毅,王英龙,郭 强.无线传感器网络室内信道模型的研究[J].计算机应用研究,2009,26(12):4712-4715.
[6]Liu Banteng,Wang Zhangquan,Chen Juhua.Research on the node location algorithm in the wireless sensor networks[C]//International Conference on Electrical and Control Engineering,IEEE,2011:350-353.
[7]Zhang Rongbiao,Guo Jianguang,Chu Fuhuan,et al.Environmental-adaptive indoor radio path loss model for wireless sensor networks location[C]//Int'l J Electron Commun,AEU,2011:1023-1031.
[8]Tang Guilin,Qiu Yunming.Improved least square method apply in ship performance analysis[C]//2010 3rd International Conference on Advanced Computer Theory and Engineering(ICACTE),2010:594-596.
[9]章坚武,张 璐.基于Zig Bee的 RSSI测距研究[J].传感技术学报,2009,22(2):139-142.
猜你喜欢
数学物理学报(2021年4期)2021-08-30
气象学报(2021年2期)2021-05-13
现代计算机(2020年31期)2020-12-28
数学大世界(2020年2期)2020-03-07
科学(2020年3期)2020-01-06
小学生学习指导(低年级)(2018年11期)2018-12-03
价值工程(2017年31期)2018-01-17
电子制作(2017年7期)2017-06-05
太空探索(2016年9期)2016-07-12
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
