基于统计线性化的确定采样滤波器稳定性分析
2015-01-04 08:51丛源材吴青坡周绍磊
电子设计工程 2015年12期
丛源材,吴青坡,周绍磊
(海军航空工程学院 控制科学与工程系,山东 烟台 264001)
目前关于确定采样滤波器的推导过程通常采用高斯假设下的贝叶斯法则[1-2],得到的非线性高斯滤波器可以看作是这一类滤波器的统一结构,在该结构下只需要完成对一二阶矩的近似就可得到相应的确定采样滤波器。
确定采样型滤波器在使用过程中经常会出现滤波发散的问题,这是由于确定采样滤波器属于局部滤波器,存在截断误差,误差的大小直接影响滤波器的稳定性,而且在整个滤波过程中,不同时刻不同状态值下误差的大小不一样,很难提前确定,需要在滤波过程中加以补偿。通常情况下,为了保证滤波器的稳定性,通常会人为增大噪声协方差矩阵,但是这样会导致滤波收敛速度减慢和精度下降[3]。为了避免滤波器发散和精度降低,需要对滤波器的稳定性进行分析,从而找到避免滤波器发散的方法。
虽然通过递推贝叶斯估计可以给出确定采样型滤波器的统一结构,但是不便于对滤波器进行稳定性分析。目前对滤波器的稳定性研究,主要基于线性系统的稳定性理论。对于非线性滤波器,通常是对非线性系统经过一阶泰勒级数展开线性化之后,判断其稳定性[4-7],因此只适用于一阶连续可导的系统。本文采用统计线性化方法建立状态误差传递方程,对确定采样型滤波器进行稳定性分析。
1 统计线性化
给定非线性系统状态方程和量测方程

xk为n维状态向量;yk为 m维量测向量;wk和vk分别为量测噪声。
确定采样型滤波器的滤波过程如下:
1)根据k时刻的状态估计值x^k和协方差矩阵Pk选取采样点{σi,ωi}i=1,…,l;
2)状态传递方程:
3)量测更新方程:


给定非线性方程

对方程进行线性化得到

定义线性化误差

定义二次型性能指标

将式(16)分别对A和b求导并令其结果为零

记 x=Ex、y=Ey、Pxx=E[(x-x)(x-x)T]、Pyx=E[(y-y)(x-x)T],求解式和式可得使得该性能指标最小的A和b为

将和带入到中得,

由于

因此,在统计意义下,式是式的最优线性化。
线性化误差的方差阵
选取点集{xi},通过非线性方程就存在着点集{yi}与之对应,在统计线性化时,所用到随机变量的一二阶矩通过一组点集{(xi,yi),i=1,…,r}得到。 如果随机向量 x 与 y 之间存在着某种对应的关系,那么可以通过随机向量的均值和协方差矩阵建立它们之间的线性关系。
2 统计线性化的采样实现
对方程和进行统计线性化得到新的状态方程和量测方程
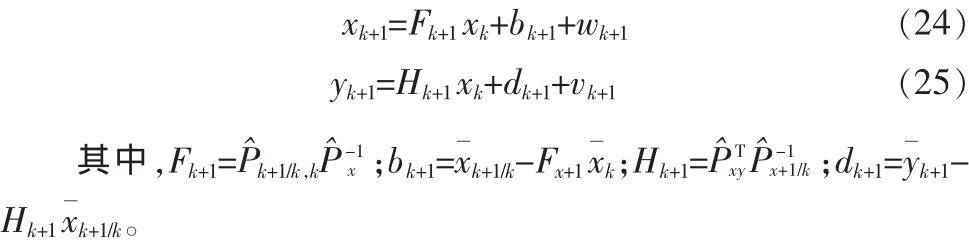
在对非线性方程的统计线性化时需要用到的统计特征量通过采样点来计算,其中xk和P^k为k时刻的状态估计值x^k和协方差矩阵 Pk。 根据x^k和 Pk进行采样,得到采样点{σi,ωi}i=1,…,l,将采样点代入系统状态方程得到一组新的采样点{ χi,ωi}i=1,…,l,再将{ χi,ωi}i=1,…,l代入量测方程中得到采样点{ξi,ωi}i=1,…,l。

3 确定采样型滤波器的稳定性分析
首先给出滤波器稳定的定义:
定义1滤波器是稳定的,要求估计误差是有界的,即

定义2滤波器是稳定收敛的,则要求估计误差是均方意义下指数有界的,即存在实数 β,υ>0,0<α<1,使得

关于滤波器的稳定收敛问题,有如下引理:
引理 1 如果存在随机过程 V(ek)和实数 vmin,vmax,μ>0,以及 0<α≤1,有下式成立

那么随机过程ek是均方意义下指数有界的,即

根据引理1,首先在统计线性化的基础上建立估计误差的传递方程,从而将确定采样型滤波器的稳定性分析问题转化为对线性系统的滤波稳定性分析。
3.1 估计误差传递方程
k时刻的状态真实值为xk,估计值为x^k,估计误差为x~k=xk-x^k,以辅助对角矩阵的形式表示线性化误差[7]。

k+1时刻的预测误差为

量测误差为

预测协方差矩阵为

进一步分析,可以得到估计误差传递方程

令 Ak+1=βk+1Fk+1,Bk+1=αk+1Hk+1,Ck+1=I-Kk+1αk+1Hk+1,Gk+1=αk+1Hk+1则式(41)简写为

滤波增益为

协方差矩阵为

由式(42)~(44)将确定采样型滤波器的稳定性分析问题转化为对线性系统的稳定性分析。
3.2 滤波器稳定性定理
根据前面建立的误差传递方程,得到如下稳定性定理:定理1对于非线性随机系统的确定采样型滤波器,在每个时刻,满足如下条件:
1)存在实数 amin,amax,bmin,bmax,cmax,gmin,gmax,使得如 下边界条件成立


2)存 在 实 数 pmin,pmax,qmax,rmax,ξmin,ζmin,ζmax,使得如下边 界条件成立

其中

定理 1 中要求矩阵 Ak+1、Bk+1、Ck+1、Gk+1是有界的, 在统计线性化的结构下,这些矩阵是由状态量和量测量的协方差矩阵决定的,也就是说相关的协方差矩阵必须是有界的,当条件满足的情况下,在有限能量系统中,通过一组有限个采样点计算得到的协方差矩阵是有界的。条件是由线性系统的可观测性决定的,文献[8]中对此有详细讨论。非线性系统稳定工作的一个重要前提就是噪声有界,因此条件和是满足的。由于误差矩阵和受初始误差的影响较大,对于条件和并不能够保证满足,这也是导致滤波器不稳定的主要原因,考虑到误差[9]矩阵中包含系统噪声和量测噪声的协方差矩阵,因此,可以对噪声协方差矩阵进行调整,从而保证条件和可以满足,但是有可能会导致滤波器的精度下降。
4 结 论
本文分析了基于线性回归的确定性采样滤波器的稳定性条件,在实际应用中,通常会采用各种方法使得初始误差在系统可承受的范围内,而导致确定采样型滤波器发散的主要原因是协方差矩阵出现非正定或奇异的情况。
针对确定采样型滤波器的稳定性分析,本文提出了一种基于统计线性化的稳定性进行分析方法。得到的结论与泰勒级数展开的方法一致,但是不需要系统方程一阶连续可导,适用范围更广。
[1]K Ito,K Xiong.Gaussian filters for nonlinear filtering problems[J].IEEE Transactions on Automatic Control,2000,45(5):910-927.
[2]I Arasaratnam,SHaykin.Cubature kalman filters[J].IEEE Transactions on Automatic Control,2009,54(6):1254-1269.
[3]T Lefebvre,H Bruyninckx,et a1.Comment on “a new method for nonlinear transformation of means and covariances in filters and estimations”[J].IEEE Transations on Automatic Control,2002,47(8):1406-1408.
[4]Xiong K,Zhang H Y,Chan CW.Performance evaluation of UKF-based nonlinear filtering[J].Automatica,2006,42(2):261-270.
[5]Xu J,Wang S,Dimirovski G M,et al.Stochastic stability of the continuous-time Unscented Kalman Filter[C]//Decision and Control,2008.CDC 2008.47th IEEE Conference on.IEEE,2008:5110-5115.
[6]LI Li,XIA Yuan-qing.Stochastic stability of the Unscented Kalman Filter with intermittent observations[J].Automatica,2012,48(5):978-981.
[7]Dymirkovsky G.New results on stochastic stability of discrete-time Unscented Kalman Filter[C]//2012 7th IEEE Conference on Industrial Electronics and Applications(ICIEA),2012:1543-1548.
[8]Boutayeb M,Aubry D.A strong tracking extended Kalman observer for nonlinear discrete-time systems [J].IEEE Transactions on Automatic Control,1999,44(8):1550-1556.
[9]徐峰,张少博,陈海峰.发动机热试车数据测量误差分析及处理方法[J].火箭推进,2012(4):72-75.XU Feng,ZHANG Shao-bo,CHEN Hai-feng.Error analysis and processing of engine hot test data[J].Journal of Rocket Propulsion,2012(4):72-75.
猜你喜欢
延安大学学报(自然科学版)(2020年4期)2021-01-15
中等数学(2020年2期)2020-08-24
数学物理学报(2019年3期)2019-07-23
测控技术(2018年9期)2018-11-25
雷达学报(2017年3期)2018-01-19
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
福建中学数学(2016年4期)2016-10-19
考试周刊(2016年54期)2016-07-18