平面开关磁阻电动机的模态分析
2015-01-13 10:16刘崇铭曹广忠黄苏丹段吉安李玲珑
微特电机 2015年9期
刘崇铭,曹广忠,黄苏丹,2,段吉安,李玲珑
(1.深圳大学,深圳518060;2.西南交通大学,成都610031;3.中南大学,长沙410083)
0 引 言
随着机械加工、电子产品生产、自动化设备制造等现代工业的高速发展,高精度、高可靠性平面驱动装置的需求越来越高。传统平面驱动装置采用旋转电机配合机械传动装置或采用多台直线电机垂直叠加实现平面运动[1-2]。这种平面驱动装置结构复杂、精度和速度受到限制,存在成本高、体积大、可靠性差、制造复杂等缺点。平面开关磁阻电动机将电能直接转换成平面运动所需的机械能,且运动平面保持在同一高度。与传统平面驱动装置相比,平面开关磁阻电动机具有结构简单、制造方便、成本低、精度高、热耗低和可靠性高等优点[3-7]。因此,平面开关磁阻电动机在先进工业加工与制造领域存在着广泛的应用前景。
平面开关磁阻电动机的动、定子为凸极结构,且采用开关通电的方式励磁,导致运行时存在较大的振动和噪声。研究平面开关磁阻电动机的固有频率、振型等振动特性是抑制电机振动和噪声的前提[8]。然而,平面开关磁阻电动机的固有频率、振型等振动特性还未见研究。通过理论计算或模态试验可获得平面开关磁阻电动机的固有频率、振型。理论计算方法包括机电类比法、能量法和有限元法等[9]。
本文以自行研制的平面开关磁阻电动机为研究对象,给出电机的机械结构,建立电机的简化有限元模型并采用有限元法计算其固有频率和振型,进行模态试验和空载噪声实验,实验结果验证了简化有限元模型的有效性和有限元模态分析的正确性。
1 机械结构
平面开关磁阻电动机可看成将旋转开关磁阻电动机沿径向剖开拉直,并在相互垂直的X 方向和Y方向延展所得。自行研制的平面开关磁阻电动机结构如图1 所示,表1 为电机的主要机械参数。平面开关磁阻电动机由基座、定子阵列、动子平台、动子绕组、直线导轨、位置传感器等部件构成。基座尺寸:600 mm×600 mm;动子平台尺寸:250 mm ×230 mm;定子阵列尺寸:430 mm×430 mm。平面开关磁阻电动机具有单边绕组结构,绕组位于动子上。这种结构的优点是定子阵列上无绕组,加工制造方便,可有效节约成本;动子无需改变,仅扩大定子阵列的尺寸和增加直线导轨的长度即可增加电机的行程;动子制造和安装容易,进一步节省成本。

图1 平面开关磁阻电动机

表1 电机机械参数
定子如图2(a)所示,为了减小涡流损耗,图2(a)的定子由厚度为0.35 mm 的硅钢片叠压而成。定子块由四个定子按图2(b)方式组成,将四个定子块组合在一起,并用固定片固定,就组成如图2(c)所示的定子单元。很多定子单元紧密排布在一起则构成定子阵列。将固定片与基座固定,定子阵列就被固定在铝合金基座上。铝合金基座既能牢固地固定定子阵列,又不会影响定子阵列的磁路。定子阵列采用这种结构可快捷地改变电机行程,只需改变定子单元的数量而无需修改定子的尺寸。

图2 定子、定子块和定子单元
动子平台和定子阵列之间有0.3 mm 的气隙,通过直线导轨支撑于定子阵列上方。动子平台由两组三相如图3 所示的动子组成,XA,XB 和XC 相动子负责X 轴方向的运动,YA,YB 和YC 相动子负责Y轴方向的运动,六个动子相互垂直安装于动子平台,如图4 所示。动子平台结构的优点在于:X 和Y 方向的磁场几乎没有耦合,有利于电机的控制;动子排布紧凑,相同动子数量能使动子平台的尺寸最小化并增加电机行程[1]。

图3 动子
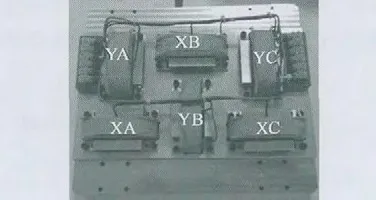
图4 动子平台
2 有限元模态分析
2.1 模态分析理论
平面开关磁阻电动机可看成是一个多自由度振动系统,系统在外载荷作用下的振动微分方程:

式中:[M],[C],[K]为电机质量、阻尼和刚度矩阵;{},{},{x}为电机加速度、速度和位移向量;{f}为外载荷向量。
平面开关磁阻电动机的固有频率和振型与外载荷{f}无关,阻尼对电机的固有频率和振型影响很小。当无外部载荷并忽略阻尼时,电机振动方程可简化:

式(2)为线性齐次微分方程,它的解可表示:

式中:{ }φ 为振幅向量;ω 为频率;θ 为初相位。
将式(3)代入式(2)可得:

式(4)可看成是一个齐次线性方程组,有非零解的充分必要条件是系数矩阵的行列式为零,即:

式(5)的解ωi(i =1,2,…,n)即为平面开关磁阻电动机的前n 阶固有频率。将ωi(i =1,2,…,n)代入式(4),可求得对应的特征向量{φi}(i =1,2,…,n),这就是每个固有频率所对应的振型。
2.2 简化有限元模型
实际的平面开关磁阻电动机结构复杂,直接进行有限元模态分析网格剖分繁琐且耗时长。为简化分析,本文在建立平面开关磁阻电动机模态有限元模型时作如下处理:(1)忽略对刚度影响很小的倒角、小圆弧和小孔等;(2)假设电机各部件之间配合紧密。
平面开关磁阻电动机动子绕组和定子阵列结构复杂,剖分网格不方便,需要做合理简化:(1)动子绕组以均匀质量计入动子块中;(2)定子阵列以均匀质量计入电机基座[10]。通过以上简化,得到平面开关磁阻电动机的三维简化模型如图5 所示,各部件材料如表2 所示。
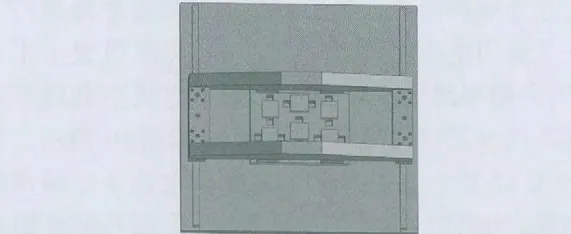
图5 平面开关磁阻电动机的三维简化模型

表2 电机各部件的材料

表3 平面开关磁阻电动机一至六阶固有频率
本文采用ANSYS 软件在自由无约束条件下分析平面开关磁阻电动机的固有频率和振型。根据电机各部件结构的形状采用不同的网格剖分方法。基座、直线导轨和动子平台等采用六面体主导法剖分网格,横梁、直线导轨的滑块等结构则采用自动划分法剖分网格。动子块、直线导轨和动子平台等小尺寸部件设置较小的网格尺寸,基座设置较大的网格尺寸。平面开关磁阻电动机网格剖分后有限元模型如图6 所示。

图6 平面开关磁阻电动机的简化有限元模型
2.3 有限元模态分析结果
低阶模态对平面开关磁阻电动机的振动有很大的影响,高阶模态的影响很小。因此,本文只输出平面开关磁阻电动机一至六阶固有频率和振型,固有频率如表3 所示,相应的振型如图7 所示。由表3可知,平面开关磁阻电动机的一阶、二阶固有频率较低,三阶固有频率较二阶大幅增大。

图7 平面开关磁阻电动机一至六阶模态振型
3 模态试验
为验证简化有限元模型的有效性和有限元法结果的正确性,采用北京东方振动和噪声研究所的DASP 信号分析系统对电机进行运行模态分析[11-14]。
平面开关磁阻电动机的模态试验平台如图8 所示。电机通入2 A 和4 A 的电流,采用四个安装在电机不同位置的LC0156A 型加速度传感器测量电机的振动加速度,通过INV3018A 型信号采集分析仪采集所得加速度信号,并导入数据采集和信号处理软件DASP V10 进行信号处理,获得振动加速度信息的频谱。四个加速度传感器共有峰值频率的平均值即为平面开关磁阻电动机的固有频率。四个传感器对应的振动加速度频谱如图9 所示。

图8 电机模态试验平台

图9 加速度波形的频谱
图9 显示,电机通入不同电流时,四个传感器均有一个7.71 Hz(理论计算所得一阶固有频率)和300.32 Hz(理论计算所得四阶固有频率)附近的峰值频率。由于运行模态分析的激振力频率范围无法控制,本文的模态试验只得到一阶和四阶固有频率。依据实验结果确定电机的一阶和四阶固有频率测量值及其与理论计算值的相对误差如表4 所示。由表4 可知,一阶及四阶固有频率的理论计算值和测量值相吻合,相对误差小于5.61%,此误差是由于采用简化模型进行有限元模态分析而产生。实验结果表明,平面开关磁阻电动机的简化有限元模型是有效的,有限元模态分析结果是正确的。

表4 固有频率测量值及其与理论计算值相对误差
4 空载噪声频谱分析
平面开关磁阻电动机调速范围较宽,当电机的某阶次电磁力频率接近或等于电机的固有频率时,电机发生共振,产生较大噪声,故通过对电机噪声的频谱分析可以验证平面开关磁阻电动机有限元模态分析和模态试验的正确性[15]。
本文采用INV9206 型ICP 声压传感器和北京东方振动和噪声研究所的DASP 信号分析系统进行平面开关磁阻电动机空载噪声实验,将电机置于半自由场,采用半球面测点布置法测量电机空载时不同电流下连续运动的噪声,实验系统如图10 所示。图11 和图12 给出电机在5 A 和6 A 电流下的噪声频谱结果。由图11 和图12 可看出,平面开关磁阻电动机在300.32 Hz(理论计算所得四阶固有频率)和405.34 Hz(理论计算所得五阶固有频率)附近噪声声压出现峰值,间接验证了有限元模态分析和模态试验的正确性。

图10 电机噪声测试系统

图12 6A 电流下电机的空载噪声频谱
5 结 语
本文以一台自行研制的平面开关磁阻电动机为研究对象,介绍了电机的机械结构,建立了电机的简化有限元模型,基于该模型进行了有限元模态分析,并进行了模态试验和电机空载噪声实验。经分析和实验得出以下结论:利用本文提出的对绕组和定子阵列简化的有限元模型可以准确分析平面开关磁阻电动机的模态;理论计算与模态试验相结合的分析方法应用于平面开关磁阻电动机振动特性研究,可以验证理论计算结果的正确性,为同类电机振动和噪声的抑制奠定了基础,也对同类电机的结构改进设计具有参考价值。
[1] 潘剑飞,曹广忠,张宙. 平面电机设计与控制[M],北京:科学出版社,2011.
[2] 杨金明,吴捷,张宙,等. 平面电动机的现状及发展[J]. 微特电机,2003,31(6):31-34.
[3] 寇宝泉,张鲁,邢丰,等.高性能永磁同步平面电机及其关键技术发展综述[J].中国电机工程学报,2013,33(9):79-87.
[4] PAN J F,CHEUNG N C.An adaptive controller for the novel planar switched reluctance motor[J]. IET Electric Power Applications,2011,9(5):677-683.
[5] PAN J F,CHEUNG N C,YANG J M.Auto-disturbance rejection controller for novel planar switched reluctance motor[J]. IET Electric Power Applications,2006,153(2):307-316.
[6] 马春燕,李更新,王振民. 开关磁阻平面电机虚拟样机设计与仿真研究[J].微特电机,2010,38(7):28-30.
[7] ZHAO Shi-Wei,CHEUNG N C,GAN Wai-Chuen,et al. A self-tuning regulator for the high-precision position control of a linear switched reluctance motor[J]. IEEE Transactions on Industrial Electronics,2007,54(5):2425-2434.
[8] MORI D,ISHIKAWA T.Force and vibration analysis of induction motors[J].IEEE Transactions on Magnetics,2005,41(5):1948-1951.
[9] 孙剑波,詹琼华,黄进. 开关磁阻电机的定子振动模态分析[J].中国电机工程学报.2005,25(22):148-152.
[10] 吴建华.基于物理模型开关磁阻电机定子模态和固有频率的研究[J].中国电机工程学报.2004,24(8):109-114.
[11] 于天彪,王学智,关鹏,等. 超高速磨削机床主轴系统模态分析[J].机械工程学报.2012,48(17):183-188.
[12] 张义民,张守元,李鹤,等. 运行模态分析中固有模态和谐波模态区分方法研究[J].振动与冲击,2009,28(1):64-67.
[13] 高进,袁奇,李 浦,等.燃气轮机拉杆转子考虑接触效应的扭转振动模态分析[J].振动与冲击,2012,31(12):9-13.
[14] 徐向阳,朱才朝,张晓蓉,等. 大功率船用齿轮箱试验模态分析[J].振动与冲击,2011,30(7):265-270.
[15] YOON T Y. Magnetically induced vibration in a permanent-magnet brushless DC motor with symmetric pole-slot configuration[J].IEEE Transactions on Magnetics,2005,41(6):2173-2179.
猜你喜欢
大电机技术(2022年5期)2022-11-17
化工机械(2022年1期)2022-03-21
防爆电机(2021年4期)2021-07-28
微特电机(2020年7期)2020-07-28
微特电机(2020年3期)2020-03-24
电子制作(2018年19期)2018-11-14
电测与仪表(2016年1期)2016-04-12
现代机械(2015年1期)2015-01-15
中国神经再生研究(英文版)(2014年23期)2014-06-01
客车技术与研究(2014年3期)2014-03-20