
基于NSGA-Ⅱ的并联混合动力客车传动比优化
2015-02-16 07:51田韶鹏
武汉理工大学学报(信息与管理工程版) 2015年6期
田韶鹏,伍 磊
(1.武汉理工大学 汽车工程学院,湖北 武汉 430070;2.现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070)
基于NSGA-Ⅱ的并联混合动力客车传动比优化
田韶鹏1,2,伍 磊1,2
(1.武汉理工大学 汽车工程学院,湖北 武汉 430070;2.现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070)
对装有5挡变速器的并联式混合动力客车进行了动力系传动比的经济性和动力性双目标参数优化设计。基于并联式混合动力客车的电辅助式控制策略,利用AVL-Cruise建立其整车仿真模型。以该客车的动力性及单次充满电的续驶里程为约束条件,以最小等效百公里耗气量和0~50 km/h的加速时间为优化目标,在 Isight软件平台上设计多目标优化模型。采用非支配排序遗传算法(NSGA-Ⅱ)对变速器传动比及主传动比进行多目标优化,并对优化结果进行了并联式混合动力客车性能仿真。与优化前相比,在保证动力性的基础上,其等效百公里耗气量下降了8.4%,0~50 km/h的加速时间缩短了1.1%。
并联式混合动力客车;传动系;变速器传动比;主传动比;遗传算法;多目标优化
并联式混合电动客车(parallel hybrid electric bus,PHEB)是包含多个动力源的复杂系统,整车动力系传动参数对整车性能有较大的影响,同时由于汽车的动力性和经济性是相互矛盾的,因此PHEB动力系传动比优化属于不连续、多变量、有条件约束和非线性的多目标优化问题。目前优化PHEB的传动系统的方法主要有多目标优化算法和智能优化算法等[1-3]。由于多目标优化问题存在一个解的集合,其相互之间并不能简单地进行优劣比较。因此,一般的多目标优化是将多目标优化问题通过加权处理后转化为单目标优化问题,但优化结果受主观因素影响较大,且不准确[4-7]。而智能优化是通过算法求出非支配解或Pareto最优解,可以更好地解决这类问题。引入精英策略的非支配排序遗传算法(NSGA-Ⅱ),能扩大采样空间,避免最佳个体的丢失,提高其算法的运算速度和鲁棒性,因此其在解决PHEB动力系传动比这类多目标优化问题上更有优势[8]。
在AVL-Cruise与Isight软件的平台上,以该客车的动力性及单次充满电的续驶里程为约束条件,以最小等效百公里耗气量和0~50 km/h的加速时间为优化目标进行优化,从而确定出合适的传动系传动比,并在保证动力性的前提下,整车经济性有所提高。
1 PHEB动力系统设计与整车建模
1.1 PHEB动力系统设计
如图1所示,所设计的PHEB动力系统为典型的装有5挡变速器的双轴并联式混合动力系统。其主要部件有发动机、电动机、电动机控制器(ECU)、蓄电池组、耦合器及变速器[9]。
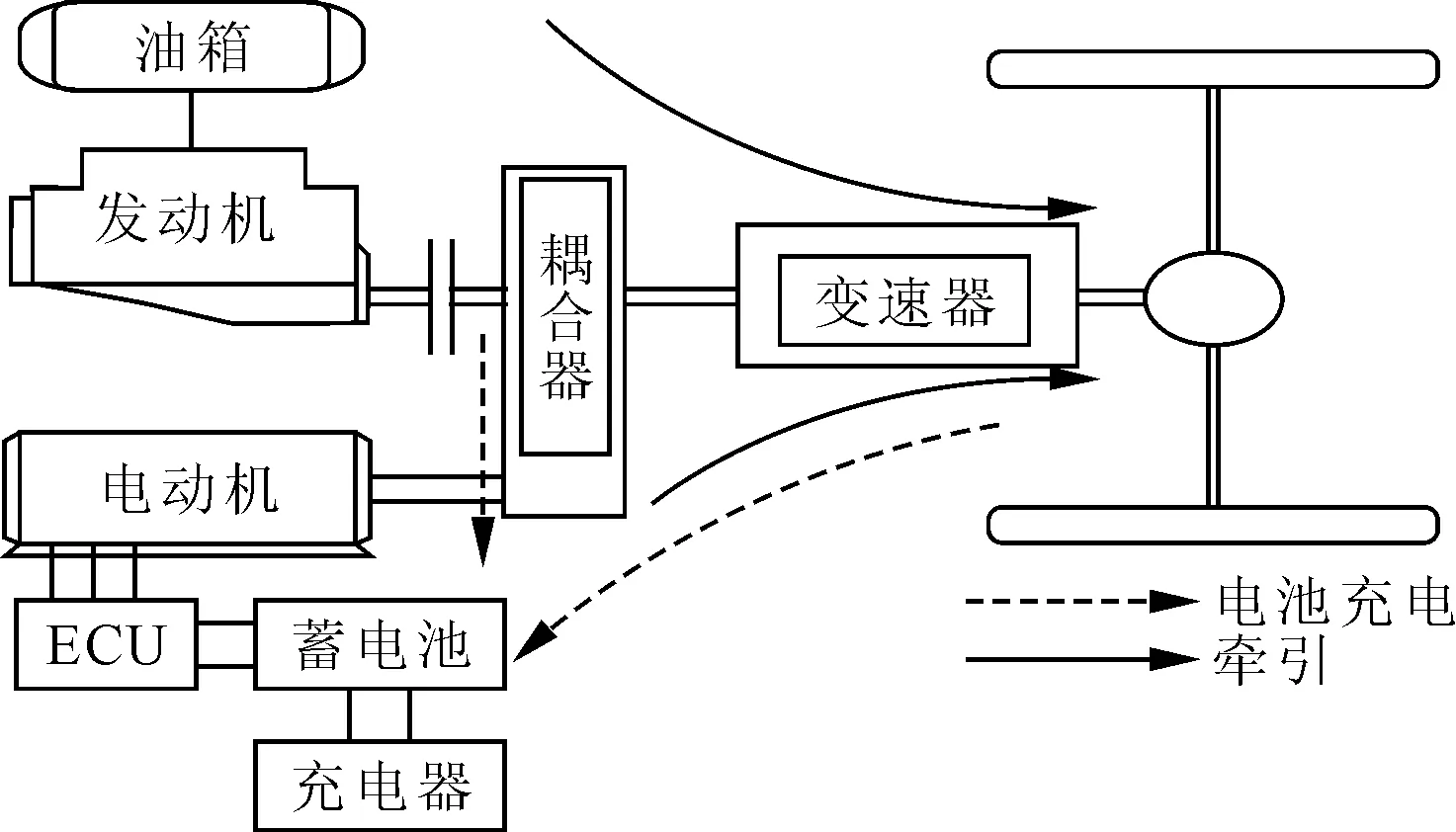
图1 PHEB动力系统示意图
其中变速器能有效地将发动机和电动机控制在一定的高效区内工作。离合器的接合状态能实现PHEB不同工作模式的转换。发动机作为主要动力来源将动力经离合器、耦合器和变速器传给后桥,再由后桥传给驱动轮。电动机作为辅助动力源对发动机起到削峰填谷的作用,以保证发动机能更多地工作在高效区内。
1.2 PHEB主要技术参数
所选用的PHEB是基于某款传统客车改装而成,表1所示为该PHEB的主要技术参数。

表1 PHEB主要技术参数
1.3 整车控制策略
根据该并联式混合动力客车的结构及所运行的工况,选用并联电机辅助控制策略。并联电机辅助控制策略的主要思想是将发动机作为汽车的主要驱动源,电机驱动系统作为辅助驱动源。
并联电机辅助控制策略调节过程如图2和图3所示。当电池组的SOC值大于SOClow时,汽车所要求的转矩在发动机最大转矩曲线与关闭转矩曲线范围内,且转速大于发动机启动转速时,发动机开始工作。当电池组的SOC值小于SOClow时,控制策略有两种情况:一种是发动机需求转矩为整车需求转矩加上附加充电转矩;另一种是发动机工作在其最小经济转矩上。

图2 SOC>SOClow时发动机工作模式

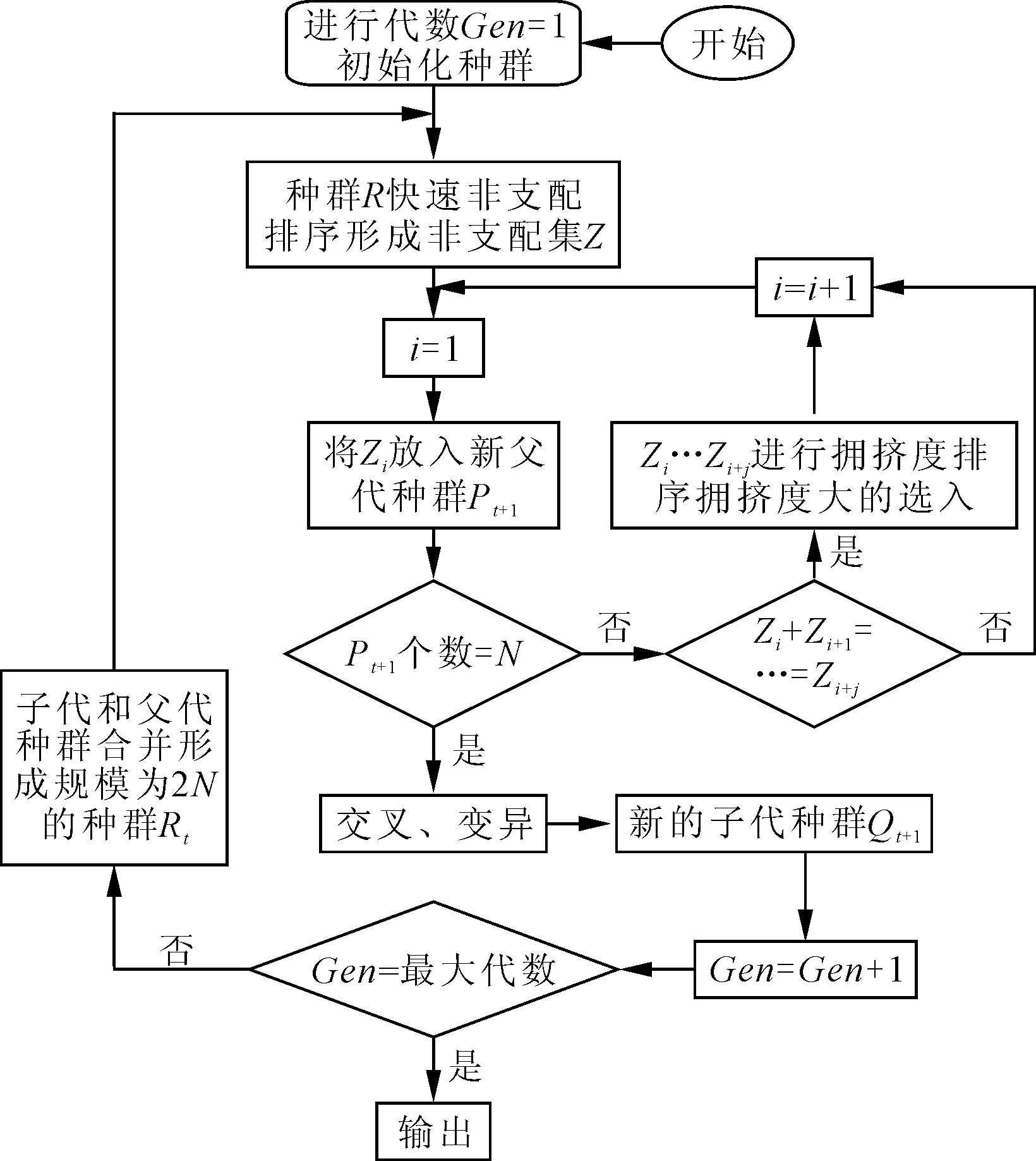
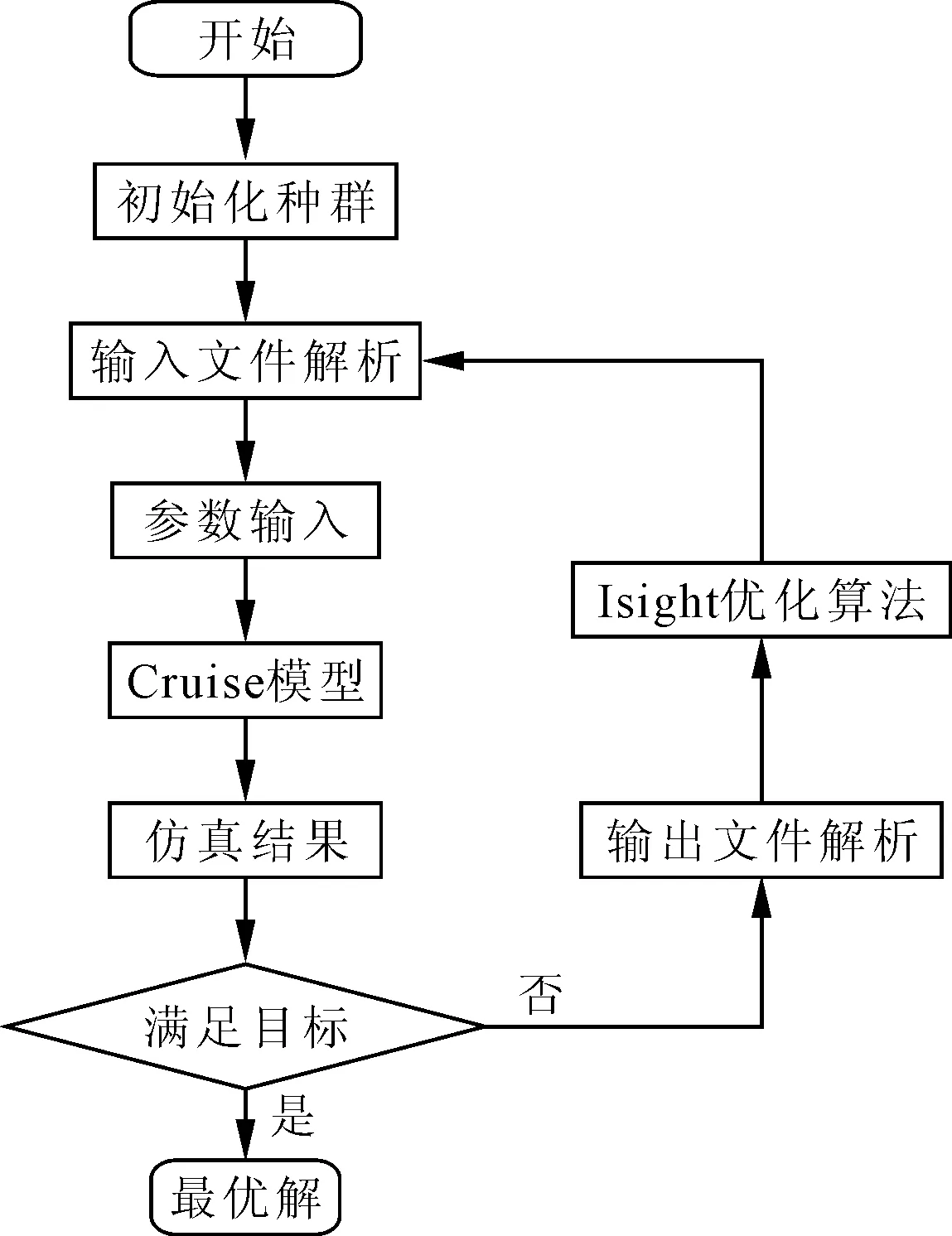
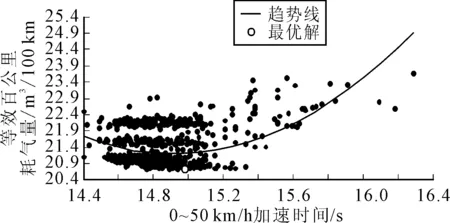
图3 SOC 1.4 基于Cruise的整车建模 AVL-Criuse是由AVL公司开发的,对整车进行动力性、经济性和排放的仿真软件。针对并联式混合动力城市客车的特点,基于Cruise和Matlab/Simulink建立了仿真模型,如图4所示。 图4 整车仿真模型 2.1 传动比优化目标确定 由于PHEB的动力性与经济性是相互矛盾的,PHEB的动力系传动比优化的目标是在保证整车各项性能的基础上,尽可能地提高整车的经济性和动力性[10]。笔者以0~50 km/h的加速时间作为汽车动力性优化目标,以美国高速循环工况的等效百公里气耗量作为经济性目标,进行多目标优化,其优化目标函数为: 式中:f(X)为目标函数;X为优化变量;T(X)为0~50 km/h的加速时间;F(X)为等效的百公里耗气量;ω1为动力性加权因子;ω2为经济性加权因子;SF1为动力性比例因子;SF2为经济性比例因子。对于混合动力客车而言,更多考虑的是客车的经济性能,而动力性只要满足基本需求即可。因此,笔者取经济性加权因子ω2=0.7,而动力性加权因子ω1=0.3。 2.2 优化变量确定 主减速器传动比和5挡变速器传动比均会影响PHEB的动力性和经济性,因此选择主减速器传动比i0和1~5各挡传动比作为优化参数。优化变量可表示为X=(x0,x1,x2,x3,x4,x5),选取的优化变量及其上下限如表2所示。 2.3 约束条件确定 在提高PHEB动力性和经济性的同时,应该满足整车的其他性能要求,包括最高车速、最大爬坡度、加速时间、地面附着条件和最高挡的最大动力因数等[11]。 表2 整车优化变量 (1)基于整车基本性能指标的约束条件为:最高车速vmax≥69 km/h;最大爬坡度αmax≥18%;0~50 km/h加速时间t50≤25s。 (2)基于最高挡的最大动力因数要求的约束条件。汽车经济性的提高,应在保证汽车动力性的前提下,即要求汽车在最小传动比时,有足够的上坡加速能力。评价指标用最高挡的最大动力因数[12]表示: (2) 式中:Mmax为最大转矩;va为最高挡时最大转矩的车速。中型和大型客车要求最高挡最大动力因数在0.04~0.06之间,即约束条件为:0.04≤D0max≤0.06。 (3)基于附着条件要求的约束条件。汽车必须满足地面附着条件,即最大牵引力必须小于或等于汽车在地面的附着力: (3) 式中:Zφ为驱动轮上的法向反作用力;φ为道路附着系数,一般取0.5~0.6。 (4)变速器传动比的约束条件。变速器相邻两挡之间传动比的比值主要影响变速器的使用性能,比值过大会造成换挡困难,一般认为比值不宜大于1.8。同时考虑到在换挡过程中,受外部阻力影响,车速有所下降,且换挡时车速越高,换挡过程的速度下降得越多。因此随着挡位的提高,相邻两挡的传动比应逐渐降低。故对相邻挡位传动比的比值做如下限制: (4) (5) (6) (5)基于单次充满电后续驶里程的约束条件。考虑到电池容量和行驶工况的要求,该并联式混合动力电动客车能在单次充满电后的纯电动续驶里程可以达到50km。根据式(7)转化为百公里耗电量的约束条件: (7) 式中:Cmax为动力电池组的容量;U为动力电池组的额定电压。 2.4 多目标NSGA-Ⅱ遗传算法 NSGA-Ⅱ遗传算法的主要思想是:在优化变量X的可行域内随机产生N个个体作为初始种群Pt,并采用基本的遗传算法产生子代种群Qt。将初代种群Pt和子代种群Qt中的个体合并成一个规模为2N的种群Rt。然后对种群Rt进行快速非支配排序,并计算每一个个体的拥挤距离,根据等级的高低来选择新的个体,产生新的父代种群Pt+1,其规模为N。随后进行下一轮的选择、交叉和变异操作,产生新的子代种群Qt+1。与结束条件进行比较,若不符合条件则将父代种群Pt+1与子代种群Qt+1合并形成种群Rt+1;若符合条件则输出结果。NSGA-Ⅱ算法的详细流程如图5所示。 图5 NSGA-Ⅱ算法流程图 2.5 基于Isight的优化模型建立 通过Isight优化软件的集成功能,可以将AVL-Cruise软件集成到Isight软件的环境下进行相关优化处理。在运行时,Isight软件自动调用Cruise软件,以实现自动优化的功能。其优化模型如图6所示。 图6 Isight与Cruise集成优化模型 3.1 循环工况选择 考虑到该并联混合动力客车大部分时间运行在高速公路上,因此笔者选择美国高速循环工况进行优化仿真分析。如图7所示,该循环工况用时765 s,行驶里程为16.5 km,平均车速为77.4 km/h,最高车速为96.4 km/h。 图7 美国高速循环工况 3.2 PHEB动力系传动比优化结果分析 在Isight环境中优化是反复迭代的过程,根据式(1)进行多目标仿真优化,最终获得1 370组解,其中可行解有733组。如图8所示,以等效百公里耗气量为y轴,0~50 km/h加速时间为x轴,绘制可行解离散点云图。随着迭代次数的增加,Pareto最优解以趋势线向下进化,最终得到一组最优解。图9所示为优化目标函数f(X)变化图,可见优化目标函数随着迭代次数的增加趋于稳定,在最优Pareto解集中,选取目标函数的最小值为最优解,可知该多目标优化是可行的。 图8 可行解离散点云图 图9 优化目标函数f(X)变化图 由于传动系传动比与齿轮齿数有关,因此需要对传动比的最优结果进行修正,并在Cruise仿真平台上对修正后的参数进行仿真。优化前后参数对比表如表3所示。从表3可以看出,优化后整车的等效百公里耗气量下降了8.4%;0~50 km/h的加速时间缩短了1.1%;在动力性方面,最大爬坡度降低并不明显,且高于客车爬坡度设计要求的18%,但能满足实际使用。 表3 优化前后参数对比表 汽车的动力性与经济性两者是相互矛盾的,因此动力性和经济性不可能同时进行优化。以等效百公里耗气量和加速时间作为多目标进行优化,在保证整车动力性能的前提下,该并联式混合动力电动客车的经济性有所改善。 通过分析装有5挡变速器的并联式混合动力电动客车的结构特点及运行工况,选用一种并联电机助力型控制策略,该控制策略可以根据不同的工况将电动机的动力和发动机的动力合理地分配给整车,从而使得发动机稳定在高效率、低消耗的状态下工作。选择对整车性能有较大影响的传动系传动比作为优化变量,以该客车的基本性能要求及单次充满电的续驶里程为约束条件,以等效百公里耗气量和加速时间为目标进行多目标优化。由于优化问题较为复杂,选用加入了精英策略的NSGA-Ⅱ算法,可使优化结果分布得更均匀,同时更具有多样性,避免了一些优秀个体的丢失。然后通过Isight优化软件和Cruise仿真软件集成优化的方法进行变速器传动比多目标优化,优化结果表明在保证整车动力性的基础上,其等效百公里耗气量下降了8.4%;0~50 km/h的加速时间缩短了1.1%。 [1] 王庆年.并联混合电动汽车传动系参数匹配[J].吉林大学自然科学学报,2000,30(1):72-75. [2] 吴光强,陈慧勇.基于遗传算法的混合动力汽车参数多目标优化[J].汽车工程,2009,31(1):60-64. [3] 杜子学,查雷.基于遗传算法的轻度混合动力汽车动力传动系参数优化[J].汽车工程学报,2013(6):433-439. [4] 陈佼,时岩.某城市公交动力传动系速比优化研究[J].机械工程与自动化学报,2014(5):51-53. [5] GAO B Z,LIANG Q.Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle[J].Mechanical Systems and Signal Processing ,2015,51(1):615-631. [6] LI L, ZHANG Y H. Hybrid genetic algorithm-based optimization of powertrain and control parameters of plug-in hybrid electric bus[J].Journal of the Franklin Institute,2014,10(6):1-23. [7] WU L H, WANG Y N.Multi-objective optimization of HEV fuel economy and emissions using the self-adaptive differential evolution algorithm[J].IEEE Transactions on Vehicular Technology,2011,60(6):2458-2470. [8] DED K, PRATAP A, AGARWAL S. A fast and elieist multi-objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Transactions on Evolutionary Compotation, 2002,6(2):182-197. [9] EHSANI M,GAO Y M,EMADI A.现代电动汽车、混合动力电动汽车和燃料电池车:基本原理、理论和设计[M].倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2010:120-130 . [10] SUN H. Multi-objective optimization for hydraulic hybrid vehicle based on adaptive simulated annealing genetic algorithm[J]. Engineering Applications of Artificial Intelligence,2010,23(1):23-27. [11] 尹安东,谌文文.基于遗传算法的ISG混合动力汽车参数优化[J].汽车工程,2011,33(10):854-857. [12] 余志生.汽车理论[M].北京:机械工业出版社,2010:5-20. TIAN Shaopeng:Prof.; School of Automotive Engineering, WUT, Wuhan 430070, China. [编辑:王志全] Transmission Ratio Optimization for a Parallel Hybrid Electric Bus Based on NSGA-ⅡGenetic Algorithm TIANShaopeng,WULei Based on the dynamical and economical performance of the parallel hybrid electric bus with 5 speeds transmission, the bi-objective optimization was designed for the ratio of power train system. Depending on the parallel electric auxiliary control strategy in a parallel hybrid electric bus, a vehicle dynamic simulation model was built with the software AVL Cruise. Aiming at the minimization of equivalent fuel consumption and acceleration time from 0 to 50km/h, the gear ratio and final drive ratio were chosen as optimization variables, while the dynamical performance and driving range with a full battery were constraints. Based on the software Isight, multi-objective optimization model was built. The elitist non-dominated sorting genetic optimization algorithm (NSGA-Ⅱ) was applied to achieve the multi-objective optimization of the gear ratio and final drive ratio; and based on the Pareto optimal solution, the dynamic simulation of the parallel hybrid electric bus was achieved. Finally, compared with the original parallel hybrid electric bus, equivalent fuel consumption was decreased by 8.4% and acceleration time was decreased by 1.1%. parallel hybrid electric bus; power train; gear ratio; final drive ratio; genetic algorithm; multi-objective optimization 2015-06-08. 田韶鹏(1974-),男,河南南阳人,武汉理工大学汽车工程学院教授. 国家科技部“863”计划基金资助项目(2011AA11A260). 2095-3852(2015)06-0850-05 A U462.34 10.3963/j.issn.2095-3852.2015.06.041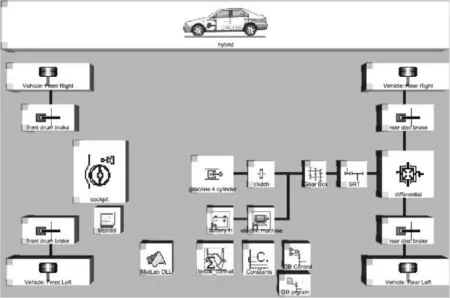
2 基于NSGA-Ⅱ的动力系传动比优化


3 PHEB动力系传动比优化分析



4 结论
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
汽车实用技术(2022年4期)2022-03-07
汽车零部件(2020年7期)2020-08-03
汽车实用技术(2018年15期)2018-08-29
上海师范大学学报·自然科学版(2018年3期)2018-05-14
潍坊学院学报(2017年2期)2017-04-20
科技创新与应用(2016年36期)2017-02-21
广西科技大学学报(2016年1期)2016-06-22
湖南大学学报·自然科学版(2014年2期)2014-12-25
自然资源遥感(2014年2期)2014-02-27
