自适应重置观测器设计方法
2015-02-18 06:56王振华
系统工程与电子技术 2015年5期
周 萌, 王振华, 沈 毅
(哈尔滨工业大学航天学院, 黑龙江 哈尔滨 150001)
自适应重置观测器设计方法
周萌, 王振华, 沈毅
(哈尔滨工业大学航天学院, 黑龙江 哈尔滨 150001)
摘要:为了提高控制系统状态估计的快速性并保证其准确性,将重置控制的思想引入观测器设计,即当观测器满足预先设定的重置条件时将其状态进行重置,提出了一种新型自适应重置观测器设计方法。重置观测器能够克服线性反馈方式的内在局限性,可实现同时降低估计误差的超调量与调节时间。首先对重置积分项引入自适应参数,并基于过零重置条件设计自适应重置观测器。对于含有重置项的自适应观测器,通过基于Lyapunov函数的方法对其进行稳定性分析,并整理成线性矩阵不等式的形式,使得设计过程更为简便、易于实现。最后通过与比例积分观测器进行比较,验证了所提方法的有效性与优越性。
关键词:重置观测器; 自适应; 状态估计; 快速性
0引言
随着科学技术不断进步,对控制过程的要求越来越高,而目前最常用的基于状态控制的方法由于控制系统的状态往往无法直接获取,需要对其进行估计,因此,如何同时提高状态估计过程的快速性与准确性显得尤为重要。目前常用的状态估计方法有Luenberger观测器[1]、比例-积分观测器[2-3]、自适应观测器[4-6]等。这些方法本质上采用的是线性反馈机制。受线性反馈的固有局限性影响,使得这些观测器无法同时降低估计误差的超调量与调节时间[7]。重置控制由于重置积分项的引入,使得该控制器不再是简单的线性控制,从而克服了线性反馈控制的固有局限性[8],因此可以很好地解决这一难题。
重置控制即当控制系统满足某种既定的重置条件时将控制器的状态进行重置。该思想最早由文献[9]提出,通过对传统积分器进行改进得到Clegg积分器,使得当积分器的输入为零时将其输出重置为零。随后于文献[10]提出了更具一般结构的一阶重置单元(first order reset element, FORE)。此后,文献[11-18]在此基础上对重置控制进行了更为全面深入的研究,将其推广到多输入多输出控制系统、非线性控制系统、离散控制系统、时滞控制系统等领域中,并取得了很多研究成果。研究表明,重置控制可以同时降低控制过程的超调量与调节时间,克服Bode幅相约束,有效补偿时滞影响等优点,具有很重要的研究意义。但同时由于重置积分项的引入可能会破坏原控制系统的稳定性,因此对重置系统的稳定性分析至关重要。经过学者的大量研究,目前常用的判断重置系统稳定性的方法有:基于Hβ判据[12]、无源控制方法[14]和基于Lyapunov方程[18]的方法等。
重置观测器最早是由文献[19]提出的。由于引入重置积分项,使得重置观测器克服了传统观测器的固有局限性,能同时降低状态估计过程的超调量与调节时间。随后,文献[20]将其进一步推广到非线性重置自适应观测器;文献[21]提出了一类最优重置观测器的设计方法,通过解决L2增益最小化问题来求解重置观测器的调度参数;文献[22]研究了多输入多输出重置观测器,但该方法对输入输出个数较多的系统具有很大的局限性,目前重置观测器在多输入多输出领域仍是一个开放性问题;文献[23]将其推广到线性时滞系统等。但是,需要指出的是,上述论文中均没有给出求解增益参数矩阵的具体方法。
因此,本文在上述论文的基础上针对单输入单输出线性时不变控制系统提出了一种新型的自适应重置观测器,对重置积分项增益矩阵引入自适应调节参数,通过该参数来调节状态估计过程的快速性与准确性。并将其转化为线性矩阵不等式的形式,使得求解过程简便,易于实现,然后通过基于Lyapunov方程的方法对该方法进行稳定性分析。最后,通过数值仿真验证该方法的可行性和有效性。
1问题描述
考虑单入单出线性时不变控制系统
(1)
式中,x∈Rn为状态向量;u∈R为控制输入向量;y∈R为测量输出向量;A,B,C为具有相应维数的系数矩阵。不失一般性,本文假设矩阵对(A,C)是可观的。
重置观测器是一类包含重置积分项和重置律的观测器,即当观测器满足预先规定的重置条件时将该观测器的状态进行重置,结构图如图1所示。

图1 重置观测器结构框图


图2 过零重置条件
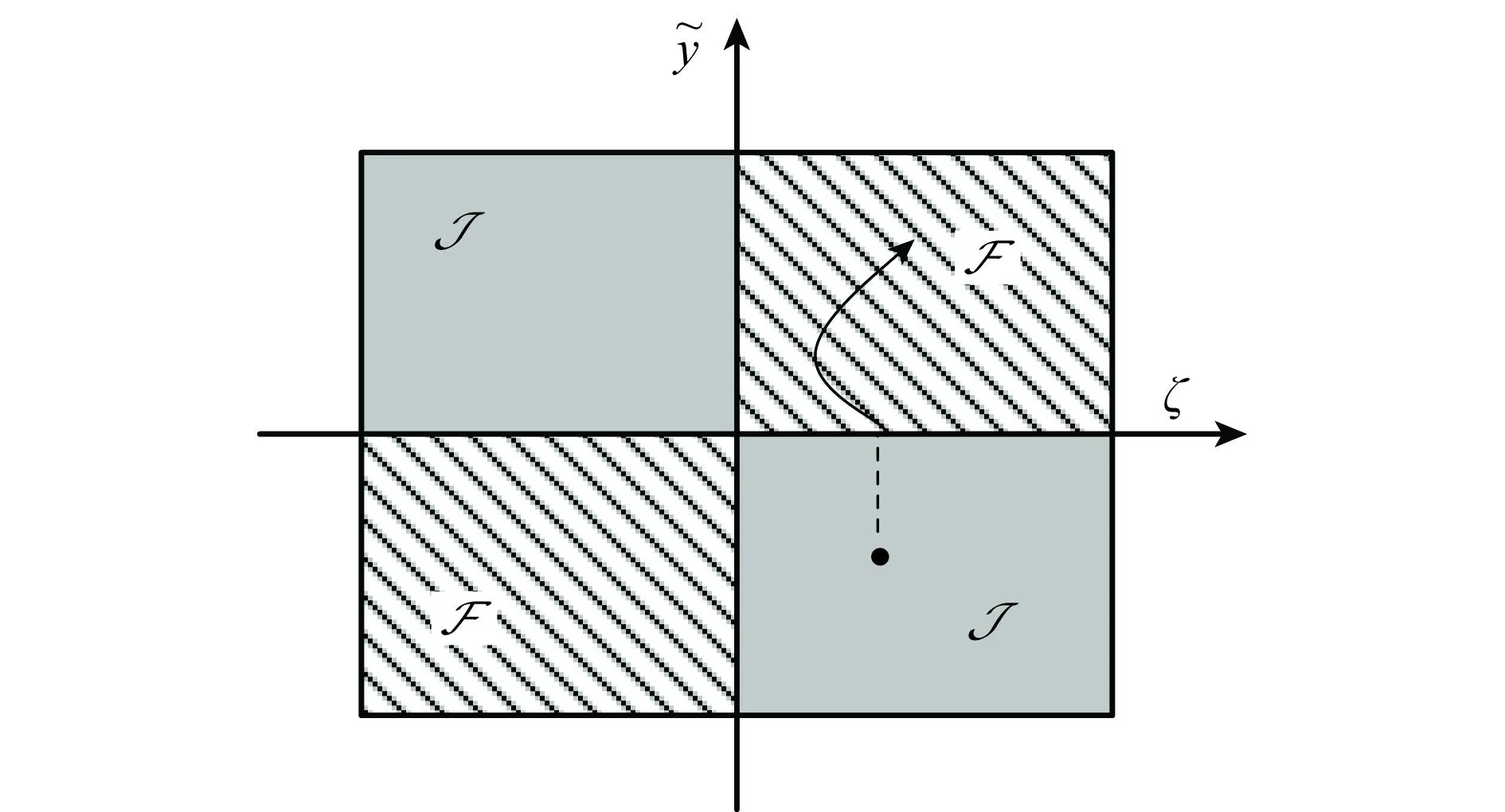
图3 扇形重置条件
根据过零重置条件,设计自适应重置观测器
(2)

(3)
其中
(4)
注 1通常Aξ,Bξ为已知的常数矩阵,其中Aξ为衰减效应系数,为负值,Bξ为积分效应系数,反映输出估计误差的权重,通常设Bξ=1。

(5)
注 3令τ≤δ观测器不发生重置,τ>δ发生重置可以避免Zeno行为的发生。
2自适应重置观测器设计
本节对第1节中提出的自适应重置观测器进行设计,主要是利用Lyapunov稳定性理论来分析重置观测器的稳定性,并以此为基础推导线性矩阵不等式形式的稳定性条件,从而得到简便、有效的自适应重置观测器设计方法。
为了设计自适应重置观测器,需要分析其误差动态。定义

(6)
为状态估计误差向量,根据系统方程式(1)和观测器方程式(2)可以得到观测器的估计误差动态方程为
(7)
采用基于Lyapunov稳定性理论来分析重置观测器的渐进稳定性。
定理 1对于给定的系统式(7),当ρ为已知正数的情况下,如果存在矩阵P=PT> 0,Q=QT> 0及矩阵W,使得式(8)和式(9)成立,则系统式(7)为渐进稳定的。
(8)
(9)
式中,KP=P-1W;KI=P-1S。
证明选取Lyapunov函数为
(10)
由于重置积分项的引入,使得该观测器不再连续,因此,若使其渐进稳定则必须同时满足

(11)
(12)
首先证明式(11):
(13)


(14)
令W=PKP,S=PKI,进一步整理得式(8)。
接下来证明式(12):
(15)
因此当时满足式(9)时,可得式(12)。
证毕
结合重置观测器重置矩阵Ar及重置积分项的调节参数Aξ,Bξ的设计特征,为了使得计算过程更为简便且又不失一般性,我们可以得出推论1。
推论 1对于给定系统式,当Ar≤0,Aξ<0,Bξ=1,ρ>0时,如果存在矩阵P=PT>0及矩阵W,满足
PA-WC+ATP-CTWT<0
(16)
则估计误差动态方程式(7)渐进稳定。式中,KP=P-1W;KI=P-1C。
证明同样选取Lyapunov函数为式(10)。

由于Q=QT> 0,Bξ=1,所以我们不妨令Q=1,可得
(17)
由于Aξ<0,且ρ>0,则
(18)
因此,当
(19)
即
(20)

同样令W=PKP,则式(20)可整理为式(16)。
通过求解线性矩阵不等式(16),得到W,即可求得KP,其中
(21)
对于式(9),由于Ar≤0,Q=1时,则显然成立。
证毕
3仿真验证
为了验证本文所设计的自适应重置观测器的可行性与有效性,本节主要利用Matlab的Simulink进行仿真,并与具有相同结构的比例积分观测器进行比较。
考虑线性系统的参数矩阵为


不失一般性,取Aξ=-0.1,Bξ=1,Ar=-0.1,δ=10-2s。
对式(16)进行求解,可得

为了验证重置观测器的有效性,与文献[24]中的比例积分观测器进行比较,形式为
(22)
式中,该观测器比例积分增益矩阵KP、KI与重置观测器中的参数相同。
接下来通过调节ρ的大小,来调节重置观测器对状态估计的精确性与快速性。本文分别选取了ρ=1,ρ=20,ρ=50的情况,仿真结果如图4~图6所示。图4~图6分别为x1,x2,x3在比例积分观测器和不同自适应调节参数的重置观测器的状态估计误差仿真曲线图。其中,蓝色的虚线为比例积分观测器的仿真曲线,实线为自适应重置观测器的仿真曲线。

图4 状态x1的估计误差结果

图5 状态x2的估计误差结果
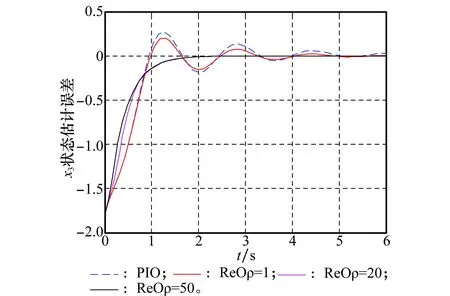
图6 状态x3的估计误差结果
由图4~图6可以看出:当ρ=1,即不加入自适应调节参数时,重置观测器的估计效果与比例积分观测器相比,减少了一部分超调量,但效果并不明显,这是因为求得的积分增益矩阵较小,导致重置积分项的重置作用较弱。因此,可以通过增大ρ来进行改善。随着ρ的增大,重置项的作用越来越明显,当ρ=50时,状态估计误差在最短时间内收敛为零并且几乎没有超调,即实现了同时降低估计过程的调节时间与超调量。
4结论
本文主要针对如何同时提高状态估计过程的快速性与准确性,提出了一种新型的自适应重置观测器,通过引入重置积分项,克服了线性反馈控制的固有局限性,实现了同时降低观测器的超调量与调节时间。引入自适应参数并转化为线性矩阵不等式的形式使得参数求解过程变得更加方便,易于实现。
本文提出的自适应重置观测器主要针对单输入单输出的线性系统,而在实际控制系统,多数为多输入多输出具有非线性特性,因此研究多输入多输出非线性控制系统的重置观测器是今后的一个重要研究内容。
参考文献:
[1]DuanGR,LiJH,ZhouLS.DesignofroustLuenbergerobserver[J].Acta Automatica Sinica, 1992,18(6):742-747.(段广仁,李建华,周连山.鲁棒Luenberger观测器设计[J].自动化学报,1992,18(6):742-747.)
[2]LiZY,ShenY,HuHZ.Novelapproachtodesignofdistur-bancedecoupledobserver[J].Control and Decision,2000,15(4):476-478.(李振营,沈毅,胡恒章.干扰解耦观测器设计的新方法[J].控制与决策,2000,15(4):476-478.)
[3]WuAG,DuanGR,DongJ,etal.Designofproportional-integralobserversfordiscrete-timedescriptorlinearsystems[J]. IET Control Theory & Applications,2009,3(1):79-87.
[4]WangWQ,TongMA.Adaptiveobserverdesignforaclassofcomplexsystems[J].Systems Engineering and Electronics,2003,25(9):1129-1134.(王文庆,佟明安.一类复杂系统自适应观测器设计[J].系统工程与电子技术,2003,25(9):1129-1134.)
[5]MengLY,JiangB.Faultdiagnosisbasedonthenonlinearadaptiveobserver[J]. Systems Engineering and Electronics,2008,30(7):1317-1319.(孟令雅,姜斌.基于非线性自适应观测器的故障诊断[J].系统工程与电子技术,2008,30(7):1317-1319.)
[6]EkramianM,SheikholeslamF,HosseinniaS,etal.AdaptivestateobserverforLipschitznonlinearsystems[J].Systems & Control Letters,2013,62(4):319-323.
[7]GoodwinGC,SalgadoME,YuzJI.Performancelimitationsforlinearfeedbacksystemsinthepresenceofplantuncertainty[J].IEEE Trans.on Automatic Control,2003,48(8):1312-1319.
[8]BanosA,BarreiroA. Reset control systems[M].Springer:AdvancesinIndustrialControl, 2012.
[9]CleggJC.Anonlinearintegratorforservomechanism[J].IEEE Trans.on American Institute of Electrical Engineers,1958,77(2):41-42.
[10] Horowitz I M, Rosenbaum P. Nonlinear design for cost of feedback reduction in systems with large parameter uncertainty[J].InternationalJournalofControl, 1975, 24(6): 977-1001.
[11] Beker O, Hollot C, Chait Y, et al. Fundamental properties of reset control systems[J].Automatica,2004,40(6):905-915.
[12] Barreiro A, Banos A, Dormido S, et al. Reset control systems with reset band: well posedness, limit cycles and stability ana-lysis[J].Systems&ControlLetters, 2014, 63(1): 1-11.
[13] Banos A, Barreiro A. Delay dependent stability of reset systems[J].Automatica. 2009, 46(1): 216-221.
[14] Carrasco J, Banos A, Schaft A V D. A passivity-based approach to reset control systems stability[J].System&ControlLetters, 2010, 59(1): 18-24.
[15] Li L Y, Wu F, Wang X M. A reset controller dedign method for MIMO linear systems[C]∥Proc.ofthe32ndChineseControlConference, 2013:2132-2136.
[16] Li H, Du C L, Wang Y Y, et al. Discrete-time optimal reset control for hard disk drive servo systems[J].IEEETrans.onMagnetica, 2009, 45 (11): 5104-5107.
[17] Guo Y Q, Gui W H, Yang C H, et al. Stability analysis and design of reset control systems with discrete-time triggering conditions[J].Automatica, 2012, 48(3):528-535.
[18] Jin S T, Hou Z S, Chi R H. A novel higher order model free adaptive control for a class a class of discrete time SISO nonli-near systems[J].JournalofDynamicSystems,MeasurementandControl-TransactionsoftheASME,2013,135(4):044503 (1-5).
[19] Paesa D, Franco C, Llorente S, et al. Reset adaptive observers and stability properties[C]∥Procofthe18thIEEEMediterraneanControlConference, 2010: 1435-1440.
[20] Paesa D, Franco C, Llorente S, et al. Reset adaptive observer for a class of nonlinear systems[J].IEEETrans.onAutomaticControl, 2012, 57(2): 506-511.
[21] Paesa D, Banos A, Sagues C. Optimal reset adaptive observer design[J].Systems&ControlLetters,2011,60(10):877-883.
[22] Paesa D, Franco C, Llorente S, et al. Reset observers applied to MIMO systems[J].JournalofProcessControl,2011,21(4):613-619.
[23] Paesa D, Banos A, Sagues C. Reset observers for linear time-delay systems in: a delay-independent approach[C]∥Proc.ofthe50thConferenceonDecisionandControlandEuropeanControlConference, 2011: 4152-4157.
[24] Jung J, Hwang J, Huh K. Optimal proportional integral adaptive observer design for a class of uncertain nonlinear systems[C]∥Proc.oftheAmericanControlConference,2007:1931-1936.
周萌(1988-),女,博士研究生,主要研究方向为故障诊断与容错控制。
E-mail:zhoumeng6932@126.com
E-mail:zhenhua.wang@hit.edu.cn
沈毅(1965-),男,教授,博士,主要研究方向为控制系统的故障诊断、飞行器制导与控制技术、超声成像技术。
E-mail:shen@hit.edu.cn

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141028.1612.005.html
Adaptive reset observer design method
ZHOU Meng, WANG Zhen-hua, SHEN Yi
(SchoolofAstronautics,HarbinInstituteofTechnology,Harbin150001,China)
Abstract:In order to improve the rapidity of state estimation and guarantee the accuracy at the same time, a reset element is introduced to observer which resets the outputs of the integral term depending on a predefined condition and then a novel adaptive reset observer is proposed. The linear fundamental limitations are overcame and the overshoot and settling time of the estimation process can be decreased. Firstly an adaptive parameter to the integral term is introduced, then the adaptive reset observer based on the zero crossing reset condition is designed.The state stability of the adaptive reset observer is analysed with the method which is based on the lyapunov function and it is written as an equivalent linear matrix inequality problem. Finally the simulation example is given. Compared with the proportion integral observer, the effectiveness of the proposed method is illustrated.
Keywords:reset observer; adaptive; state estimation; rapidity
通讯作者王振华(1987-),,男,讲师,博士,主要研究方向为航天器故障诊断与容错控制、描述系统故障诊断。
作者简介:
中图分类号:TP 273
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.26
基金项目:国家自然科学基金(61273162,61403104);中央高校基本科研业务费专项资金(HIT.NSRIF.2015034)资助课题
收稿日期:2014-04-03;修回日期:2014-09-24;网络优先出版日期:2014-10-28。
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24
中国教育信息化·基础教育(2016年11期)2016-12-27
软件导刊(2016年11期)2016-12-22
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
舰船科学技术(2016年1期)2016-02-27
中国继续医学教育(2015年1期)2016-01-06
船海工程(2015年4期)2016-01-05