
交通事故再现中轮胎/路面附着系数估算方法
2015-02-21 02:38刘荣昌
江苏大学学报(自然科学版) 2015年4期
陈 涛,刘荣昌,杨 震
(1.长安大学交通运输部汽车运输安全保障技术重点实验室,陕西西安 710064;2.长城汽车股份有限公司动力研究院,河北 保定 071000)
在影响车辆制动过程的因素中,轮胎/路面附着系数是关键因素,其主要应用于估算车辆碰撞前后的车速.轮胎/路面附着系数与交通事故之间有密切的联系,轮胎/路面附着系数越低,交通事故率越高[1].据统计,我国从2006年到2011年间发生在沥青路面上的交通事故率由59.60%增长到65.24%,而且在干燥环境下发生事故的可能性在85%左右[2].目前,主要有2种估算轮胎/路面附着系数方法:①考虑路面、天气条件以及车辆状况等因素,通过专家经验法或者数据拟合滑移率等方法估算出轮胎/路面附着系数值,例如 Cause-based法、Effectbased法[3]、μ -S曲线法[4];② 在现场附着系数测试试验中,通过拖胎法、加速度计法和最大回正力矩法[5-7]获得更准确的值.
事故再现中,确定事故现场轮胎/路面附着系数通常依据GA/T 643—2006《典型交通事故形态车辆行驶速度技术鉴定》[8]中汽车纵滑附着系数参考值进行估计.而各轮胎/路面附着系数研究领域的学者也偏重于专业层面,缺乏综合因素的考虑,在特定环境中估算的轮胎/路面附着系数误差可能较小,但车辆运行在复杂变化环境中时,估算的轮胎/路面附着系数误差可能较大[9].大量环境各异的事故形态,难以做到每场事故都有对应的现场附着系数试验值.因此,事故鉴定往往基于先前道路实车试验数据,研究轮胎/路面附着系数影响因素与轮胎/路面附着系数内在联系,得出事故现场附着系数值.
即使在相同路面和相同环境下,不同车辆也表现出不同制动性能,故需要1种综合的方法以解决这种差异性问题.因此,笔者基于轮胎/路面附着系数各影响因素提出1种轮胎/路面附着系数的估算方法,得出不同道路类型和车辆有无ABS的轮胎/路面附着系数估算模型,最后经过试验验证,证明模型具有可靠的有效性.
1 轮胎/路面附着系数估算方法
1.1 影响因素分析
轮胎/路面附着系数主要影响因素:车速、路况、路面类型、胎况、胎压、轮胎载荷和有无 ABS等[10-11].这些因素中可分类为可测量的物理值与不可测量的语言值,物理值可通过清晰数字表示,如车速、胎压等,而不可测量的语言值,只能通过语言表达,如路况、胎况等.由于思维逻辑的差异性,对事物的认知也存在差异,所以对某一事物的归类也不尽相同.因此,提出1种基于模糊控制的轮胎/路面附着系数估算方法,既考虑了可测量的物理值又融入了不可测量的语言值,符合日常思维逻辑.
1.2 模型的输入变量
以轮胎/路面附着系数主要影响因素作为输入变量,即路况、胎压、胎况和车速,则模糊输入论域为

式中:x1为路况,以水膜厚度为评价标准,选择水膜最大厚度为10 mm,则x1论域为[0,10];x2为胎压,以轮胎冷态充气气压为评价标准,依据GB/T 26149—2010《基于胎压监测模块的汽车轮胎气压监测系统》[12]对监测胎压的规定,下限阈值为75%的轮胎冷态充气气压,上限阈值为125%的轮胎冷态充气气压,则x2论域为[75,125];x3为胎况,以轮胎表面磨损率为评价标准,参照GB 9743—2007《轿车轮胎》[13]对胎面磨损的规定,胎面磨损到磨耗标志处时应更换轮胎,此时可以认为轮胎磨损达到100%,则x3论域为[0,100];x4为车速,以汽车制动初速度为指标,选择上限车速为150 km·h-1,则x4论域为[0,150].
1.3 模型的输出变量
以轮胎/路面附着系数作为输出变量,则模糊输出论域为

式中:u为轮胎/路面附着系数,则输出变量模糊子集取值范围u=[0,1].
1.4 隶属函数的建立
输入、输出变量均必须采用自然语言的形式给出,即为语言变量.所以首先需将数值变量变换为语言变量,语言模糊变量的隶属函数分布一般选择正态分布和三角型分布形式.在这里选择三角型分布,针对不同车型建立不同车速隶属函数[14].
1.4.1 路况的隶属函数
对于路况采用3个语言模糊集进行描述:干燥(A1)、潮湿(A2)、积水(A3).路况各语言模糊子集的隶属函数曲线如图1所示.

图1 路况模糊子集的隶属函数
1.4.2 胎压的隶属函数
对于胎压采用3个语言模糊集进行描述:低(B1)、适中(B2)、高(B3).胎压各语言模糊子集的隶属函数曲线如图2所示.
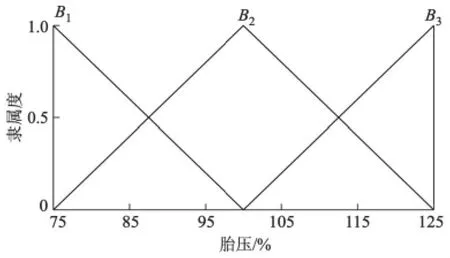
图2 胎压模糊子集的隶属函数
1.4.3 胎况的隶属函数
对于胎况采用3个语言模糊集进行描述:好(C1)、一般(C2)、差(C3).胎况各语言模糊子集的隶属函数曲线如图3所示.

图3 胎况模糊子集的隶属函数
1.4.4 车速的隶属函数
对于轿车、微型货车、微型客车等的车速采用5个语言模糊集进行描述:低(D1)、较低(D2)、中等(D3)、较高(D4)、高(D5).各语言模糊子集的隶属函数曲线如图4所示.
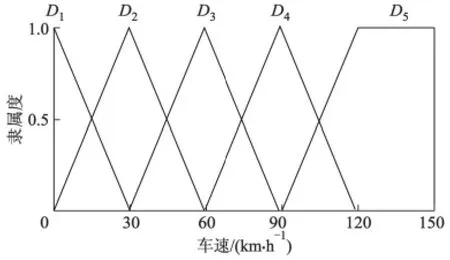
图4 轿车、微型货车、微型客车等的车速模糊子集的隶属函数
对于中型客车、大型客车、中型货车、重型货车等的车速采用5个语言模糊集进行描述:低(D1)、较低(D2)、中等(D3)、较高(D4)、高(D5).各语言模糊子集的隶属函数曲线如图5所示.

图5 中型客车、大型客车、中型货车、重型货车等的车速模糊子集的隶属函数
1.4.5 附着系数的隶属函数
对于附着系数采用5个语言模糊集进行描述:低(E1)、较低(E2)、中等(E3)、较高(E4)、高(E5).各语言模糊子集的隶属函数曲线如图6所示.
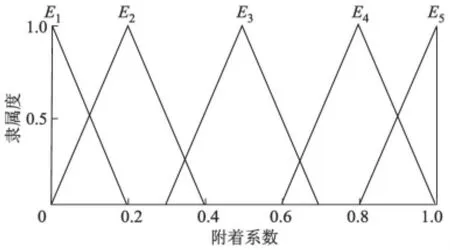
图6 附着系数模糊子集的隶属函数
1.5 模型建立
以X作为输入变量,以U作为输出结果,建立模糊控制模型,模型示意图如图7所示.模型计算过程:① 建立输入、输出变量隶属函数;② 建立模糊控制规则,计算模型的模糊关系矩阵R;③ 根据隶属函数计算输入变量的隶属度,通过模糊推理公式U=X。R,式中“。”为矩阵的合成运算,计算输出变量的隶属度;④采用加权平均法,计算输出变量值.

图7 模糊控制模型示意图
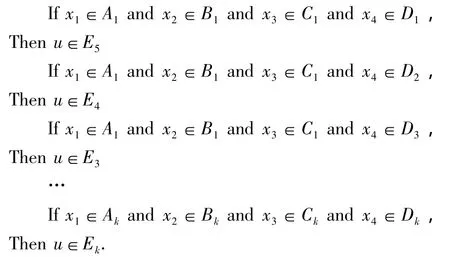
模糊控制规则的制定是模糊推理的关键.由图1-6中输入变量子集的数量,再根据排列组合原理,共有3×3×3×5=135条规则,针对输入变量和输出变量,建立ABS车辆控制规则和非ABS车辆控制规则,即:
1)ABS车辆控制规则为
2)非ABS车辆控制规则为

对于每条控制规则,都蕴含1个模糊关系矩阵Rk,应用Mamdani算法计算出第k条控制规则对应的模糊推理关系矩阵:

式中“∧”为合取运算.
经过式(3)的计算得出模糊关系矩阵:
式中:i=1,2,…,135;j=1,2,…,5.
将所有的模糊控制规则组合在一起,则描述整个模型的控制规则的模糊关系矩阵为

式中“∪”为矩阵的析取运算.
为计算输出变量隶属度,将式(5)代入近似推理合成法则得

虽然总模糊关系矩阵R由135个子模糊关系Rk组成,但每一次输入并不能全部激活模糊关系矩阵R,只是用到其中某几个子模糊关系矩阵Rk,因此,利用式(3)只计算被激活的控制规则下的Rk.假设有输入变量隶属度:
激活i条控制规则,则对每条控制规则的输出变量计算隶属度为
式中μEkj(u)为第k条控制规则下计算的输出变量隶属度.
模糊推理后的输出变量模糊子集如图8所示.实线范围为U实际取值区域,虚线范围为无效区域.
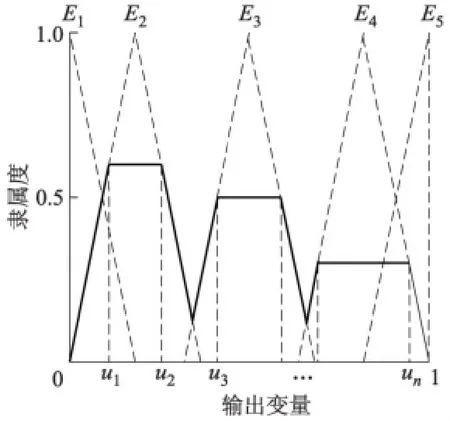
图8 模糊推理后的输出变量模糊子集
由图8的计算结果,通过式(6)计算i条控制规则下的输出变量隶属度为

利用加权平均法,将图8中的输出变量隶属度转化为精确值:

式中:μEj(u)为输出变量加权系数,也是其隶属度;U0为最后输出精确值,即轮胎/路面附着系数.
2 模型应用
将本模型输入到Matlab模糊逻辑工具箱中,建立ABS车辆模糊控制规则及非ABS车辆模糊控制规则,设计成为模糊控制器,可以简化人工模糊推理过程.具体应用过程如图9所示.
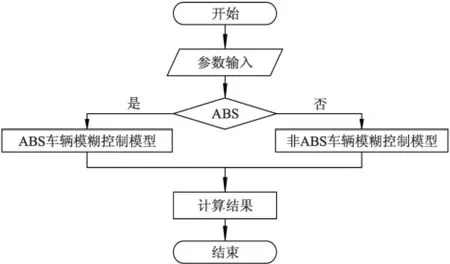
图9 模型应用流程图
为验证模型的准确性,采用实车试验的方法进行对比实测轮胎/路面附着系数与模糊预测值的误差.试验中利用SG-630便携式制动性能测试仪采集不同车速下制动距离,利用计算出的初速度值和制动距离,根据GA/T 643—2006《典型交通事故形态车辆行驶速度技术鉴定》[8]计算出轮胎/路面附着系数:

式中:v0为制动初速度,m·s-1;g为重力加速度,m·s-2;s为制动距离,m.
本次试验在长安大学汽车试验场进行,试验场具有3种低附着系数路面、2种爬坡坡道及涉水路等专用汽车试验道路设施.用 JL7200MA4(有ABS)、SGM6250UYAA(有 ABS)及 HFC1040KT(无ABS)分别进行不同车速全轮制动试验,试验条件、试验结果及模糊预测值如表1所示,其中ffuzzy为模糊计算值.
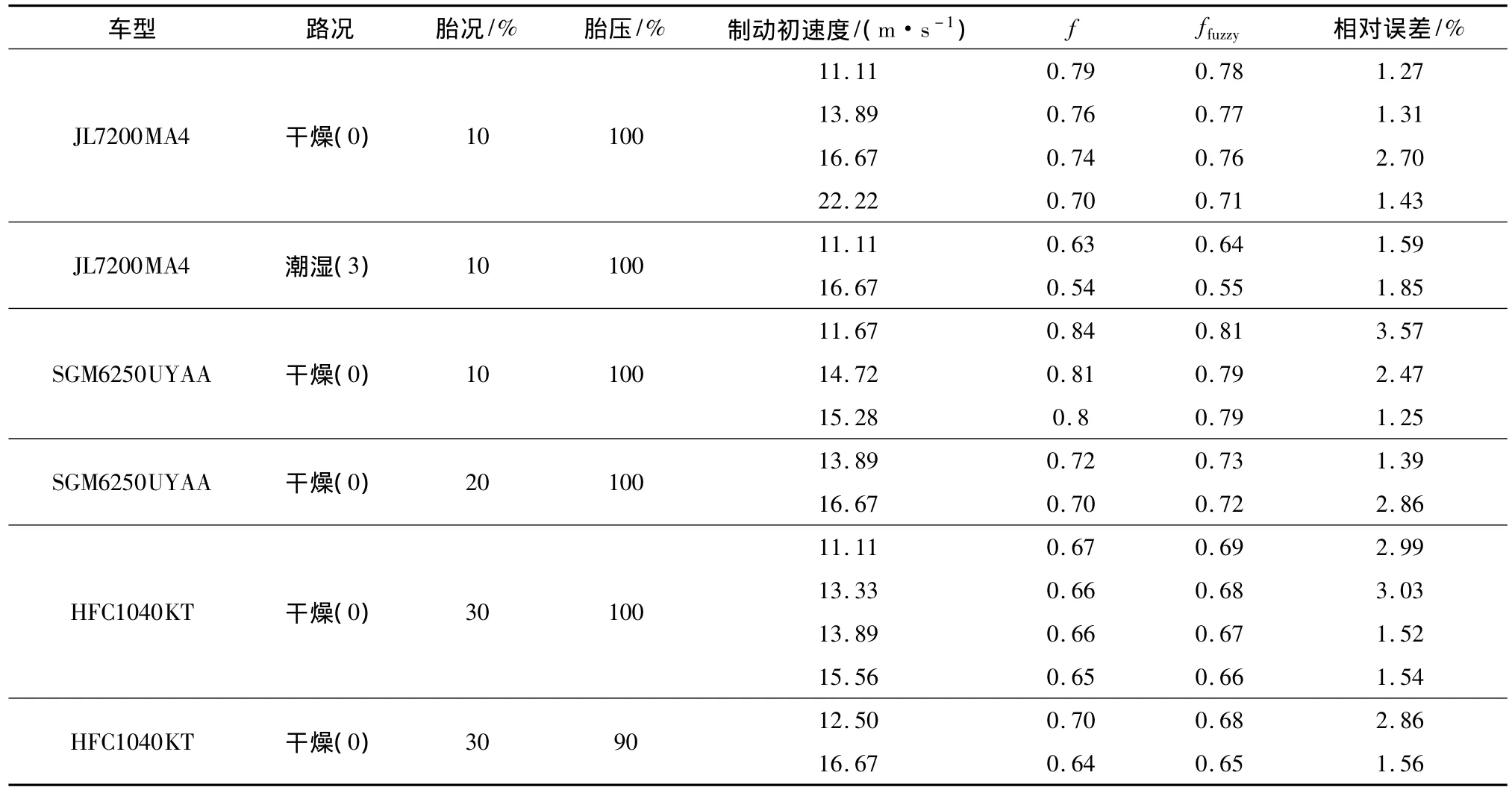
表1 实车试验预测结果
实车试验中,JL7200MA4与SGM6250UYAA属于ABS车辆,对应ABS车辆模糊控制模型,该子模型的最大相对误差为3.57%,最小相对误差为1.25%,相对误差均值为1.96%,相对误差均方差为0.80%;HFC1040KT车辆属于非ABS车辆,对应非ABS车辆模糊控制模型,该子模型的最大相对误差为3.03%,最小相对误差为1.49%,相对误差均值为2.24%,相对误差均方差为0.79%.对比2种子模型可知:该模型不受ABS、车型、路况等因素的影响.对于总模型而言,试验附着系数f与模糊计算值ffuzzy的相对误差比较小,均在4.00%以内,平均相对误差为2.06%,相对误差均方差为0.78%,结果表明:该模型可以在较小相对误差内稳定地计算出附着系数值,具有可靠的有效性.
3 结论
基于轮胎/路面附着系数为间接测量值的考虑,选取路况、胎况、车速、胎压和有无ABS等作为其主要影响因素.依据魔术公式、Burckhart模型、Kinecke模型以及道路附着系数的双指数模型等经验模型和拟合模型,结合其他专家经验法总结出的模糊控制规则库,具有准确、稳定的特点,使模糊控制模型不受ABS、车型、路面类型等因素的影响,在较小误差内估算出附着系数值.
References)
[1]Mayora J M P,Pia R J.An assessment of the skid resistance effect on traffic safety under wet-pavement conditions[J].Accident Analysis and Prevention,2009,41:881-886.
[2]公安部交通管理局.2011中华人民共和国道路交通事故统计年报[R].无锡:公安部交通管理科学研究所,2012.
[3]Müller S,Uchanski M,Hedric K.Estimation of the maximum tire-road friction coefficient[J].Journal of Dynamic Systems,Measurement,and Control,2003,125:607-617.
[4]余卓平,左建令,张立军.路面附着系数估算技术发展现状综述[J].汽车工程,2006,28(6):546-549.
Yu Zhuoping,Zuo Jianling,Zhang Lijun.Summary on the development status quo of tire-road friction coefficient estimation techniques[J].Automotive Engineering,2006,28(6):546-549.(in Chinese)
[5]Gothíe M,Parry T,Roe P.The relative influence of the parameters affecting road surface friction[C]∥2nd International Colloquium on Vehicle-Tyre-Road Interaction.Florence,Italy:[s.n.],2001:1-21.
[6]Brach R M,Rudny D F,Sallmann D W.Comparison of tire friction test methodologies used in accident reconstruction[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:980367.
[7]李 遥,张建武,管西强.基于最大回正力矩的轮-地摩擦因数估计法[J].江苏大学学报:自然科学版,2013,34(2):144-149.
Li Yao,Zhang Jianwu,Guan Xiqiang.Estimation method of tire-road friction coefficient based on maximum aligning moment[J].Journal of Jiangsu University:Natural Science Edition,2013,34(2):144-149.(in Chinese)
[8]公安部道路交通管理标准化技术委员会.GA/T 643—2006典型交通事故形态车辆行驶速度技术鉴定[S].北京:中国标准出版社,2006.
[9]李长城,刘小明,荣 建.不同路面状况对路面摩擦系数影响的试验研究[J].公路交通科技,2010,27(12):27-31.
Li Changcheng,Liu Xiaoming,Rong Jian.Experimental study on effect of road condition on pavement friction coefficient[J].Journal of Highway and Transportation Research and Development,2010,27(12):27-31.(in Chinese)
[10]朱永刚,刘小君,王 伟,等.考虑动压与路面粗糙度时轮胎湿牵引性能研究[J].汽车工程,2007,29(7):616-619.
Zhu Yonggang,Liu Xiaojun,Wang Wei,et al.A study on tire wet traction performance with consideration of road roughness and hydro dynamic action[J].Automotive Engineering,2007,29(7):616-619.(in Chinese)
[11]Martin D P,Schaefer G F.Tire-road friction in winter conditions for accident reconstruction[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:960657.
[12]全国汽车标准化技术委员会.GB/T 26149—2010基于胎压监测模块的汽车轮胎气压监测系统[S].北京:中国标准出版社,2010.
[13]全国轮胎轮辋标准化技术委员会.GB 9743—2007轿车轮胎[S].北京:中国标准出版社,2007.
[14]Vangi D,Virga A.Evaluation of emergency braking deceleration for accident reconstruction[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,2007,45(10):895-910.
猜你喜欢
电子乐园·下旬刊(2022年6期)2022-05-16
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28
汽车维修与保养(2021年1期)2021-05-27
——元征X-431标定胎压传感器的方法
汽车维护与修理(2021年19期)2021-04-14
阜阳师范大学学报(自然科学版)(2020年3期)2020-08-13
南京大学学报(数学半年刊)(2020年1期)2020-03-19
电子制作(2017年17期)2017-12-18
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
