
基于6LoWPAN的野外古墓葬外部环境监测系统
2015-02-28 17:39刘俊杰陕西科技大学电信学院西安710021
电子器件 2015年6期
李 艳,刘俊杰(陕西科技大学电信学院,西安 710021)
由于我国野外古墓葬面积大,看护与管理成本较高,因此需要进行高效地监控管理。而现有的防盗系统大多采用铺设地线方式,但造价高,施工难度大使得其没有得到很好普及[1]。
为了克服上述野外古墓葬防盗各方面的不足,提供一种基于无线传感网络的野外古墓葬防盗系统[2],并采用IEEE 802.15.4标准的6LowPAN通信协议,6LowPAN是基于IPv6的无线自组网协议标准[3],其本身是TCP/IP的架构,从服务器上可以看到每一个节点的IP地址,IPv6地址空间的优势可以为监控与防盗系统中部署大量的终端设备都分配全局地址,使终端之间、操作者和终端之间都可以进行直接的端到端通信[4]。
采用无线的方式,又具有施工简单,低能耗,低成本,覆盖面积广和响应速度快的特点[5]。
1 系统框图
图1为系统框图,由8个节点,一个控制装置,一个边界路由,一台PC机(上位机)和云服务器组成。

图1 系统框图
各个节点硬件相同,均由TI公司的C8051内核的无线射频模块CC2530和震动信号采集电路组成。
控制装置位于区域中心,由CC2530和低功耗32位处理器TM4C123GXL进行数据收发与控制,使用两个反向放置的激光头作为探照灯,通过舵机带动旋转,可实现360°旋转照明。
边界路由由射频模块CC2530组成,通过串口与PC机(上位机)通讯,具有数据双向收发功能,将节点数据传递到上位机,并从将上位机命令转发到节点[6]。
上位机为整个系统的操作、报警与显示界面。可通过云服务器更新各节点资源到Yeelink云服务器和自建的云服务器,通过Yeelink客户端或微信公众号Onet6访问各节点获取资源。
2 系统硬件设计
该系统的边界路由器为CC2530,控制装置由TM4C123GXL和CC2530通过UART传递参数。
节点硬件包括主控制电路、电源电路、声光指示电路、加速度传感器震动信号采集电路。主控制电路采用图2中的CC2530模块,CC2530是用于IEEE 802.15.4应用的SoC解决方案,能够以非常低的成本建立强大的网络节点[7]。CC2530结合了领先的RF收发器的优良性能,业界标准的增强型8051 CPU,系统内可编程闪存,8 kbyte RAM和许多其他强大的功能。

图2 CC2530管脚定义

图3 节点电路图
图3为节点电路图,由电源电路,加速度传感器MMA7260Q,蜂鸣器电路,CC2530模块转接电路,按键电路和LED指示电路组成。蜂鸣器和LED用于调试,实际使用时软件上将其关闭,以降低节点功耗。电源电路由一节3.7 V、容量为650 mA的锂电池和稳压电路组成。稳压芯片采用7533,其压降只有0.2 V,适用于无线传感网络超低功耗的场合。加速度传感器采用飞思卡尔公司模拟量输出的倾角传感器MMA7260QT,可根据X、Y、Z三轴加速度的值来确定该位置的震动幅值,结合CC2530的内置ADC单元可实现震动信号的12 bit高精度数据采集,经在户外测试,可实现数十米普通震动信号的采集[8]。
3 软件设计与流程
3.1 软件初始化流程
图4为两个部分的初始化流程。传感器节点使用开源操作系统Contiki进行节点管理[9],首先对操作系统进行相关的初始化工作,然后开启节点的网络功能并就近加入的RPL网络当中实现自动组网,接着将节点当中的所有数据信息如节点名称、位置、电量、温度、湿度以及主要用来监测的震动信号封装到不同的CoAP资源当中,最后开启传感器节点的CoAP服务器并让系统进入正常运行状态[10]。上位机软件初始化流程是首先根据之前设定的系统参数对软件进行初始化,并通过http访问边界路由的Web Server得到整个网络当中所有传感器节点的IP地址信息,就能使用计算机作为CoAP客户端对各个传感器节点进行资源列表的请求[11],并能够根据RPL的资源信息得到整个网络的组网树状图,接下来软件就能够正常运行,执行相关的节点通过数据通信进行古墓葬监测任务。
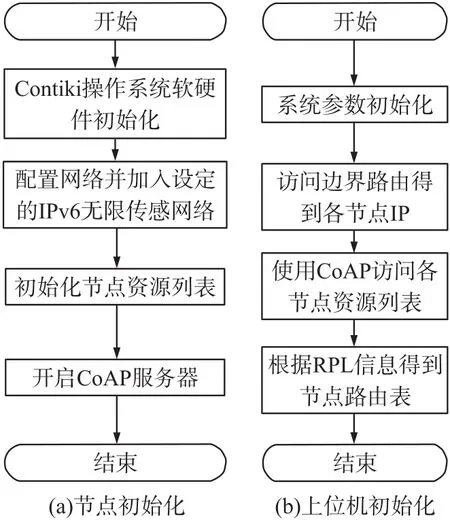
图4 软件初始化流程
3.2 软件正常运行流程
图5为软件的正常运行流程。将传感器节点当中的震动信号配置为可订阅的资源,CoAP客户端可通过订阅方式定期得到服务器发送回来的资源数据而不必去总是单独的访问服务器去获取资源数据。
传感器节点初始化后等待上位机CoAP客户端进行该资源的订阅,定时发送数据到客户端,客户端也能对节点当中的其他资源如电量、温度等信息进行访问,传感器节点中的CoAP服务器亦会发送访问的目标资源数据至上位机中。
当订阅的震动数据有异常时,上位机显示并分析各个节点同一时刻的数据进行决策[12],计算震动信号的方位并控制激光头指向异常震动方位并打开警报。
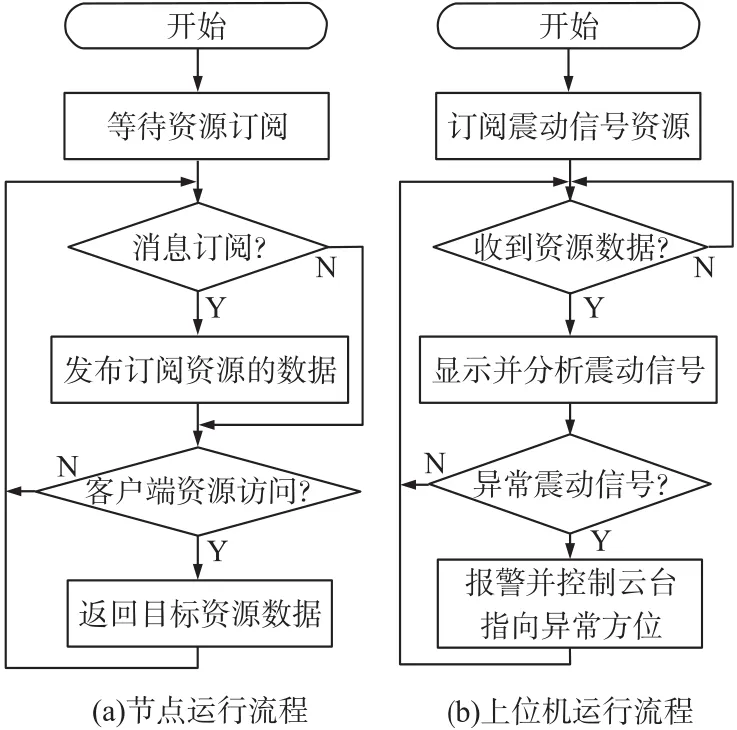
图5 软件正常运行流程
4 云服务器与手机客户端
4.1 Yeelink云服务器
可将各节点的震动信息通过边界路由上传至Yeelink服务器,在PC端查看各节点资源,亦可通过Yeelink的Android/IOS客户端访问各节点获取震动信息,图6为PC端Yeelink采集到的节点震动信息,图7为Yeelink Android客户端获取的节点震动信息。

图6 Yeelink服务器中的设备震动数据

图7 Yeelink手机客户端获取的设备数据
4.2 自建云服务器与微信公众号
通过自建的云服务器发出请求到Yeelink服务器,Yeelink返回请求的节点数据,通过微信公众号向自建云服务器发请求,云服务器解析并发出解析数据,通过微信公众号可获取设备信息[13]。图8为Yeelink、自建云服务器和微信公众号发送请求命令与返回数据的流程。

图8 Yeelink与微信公众号数据通信流程
微信公众号内”sust NUM”是向服务器发出获取NUM号节点的震动信息的命令,图9是节点周围没有人员走动时,在微信平台上发送”sust 5”命令,收到的是设备5的状态,获取的震动值为96,而最大值接近4095,震动值覆盖范围宽,灵敏度较高,能满足该系统需求。

图9 微信公众号中获取的震动数据
5 上位机与系统测试
5.1 上位机调试工具
图10是使用C#设计的CoAP调试工具,它可以直接在计算机端以CoAP协议与传感器节点进行通信调试。左边的树状结构为传感器节点当中的资源信息,上边为相关的方法如GET、POST、Observe等,中间为相关的数据信息[14]。传感器节点将每个需要进行通信的数据封装成一个资源并作为CoAP服务器,远程计算机则作为CoAP客户端对感兴趣的资源进行访问(GET或POST)即可得到所需要的数据[15]。图中Sensors目录下的shake资源是一个可订阅的资源[16],也是最重要的震动数据的资源。通过订阅资源即可实现传感器节点内该资源的定时发送与条件触发发送功能,能够减少网络间的数据包数量,节省节点电能的消耗[17]。
图11为的为每个节点资源的访问界面,可以随时访问指定节点的各个资源信息,包括节点名称、节点坐标、电池电量、环境温度、RPL组网关系等内容。
图12为系统运行主界面,左上方为实时状态显示的界面,可以指示出发生异常震动时的具体方位,右方为异常阈值设定参数,下方为各传感器节点的CoAP地址与近两个时间段内的震动值。当一个或多个节点的震动值超出阈值时,系统根据节点的编号与位置信息确定异常震动方位,并进行红色警报,然后会在内部发送控制指令到中间的云台进行警报灯的方向控制,使其指向异常震动位置。
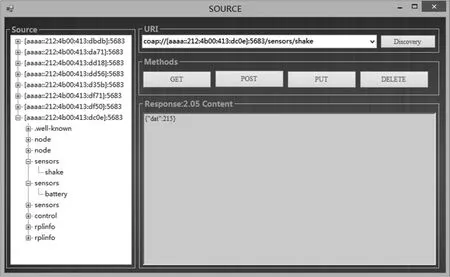
图10 传感器节点资源信息
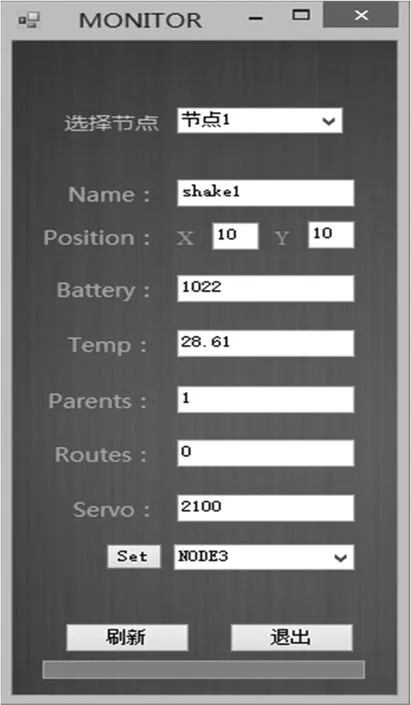
图11 单个节点访问界面
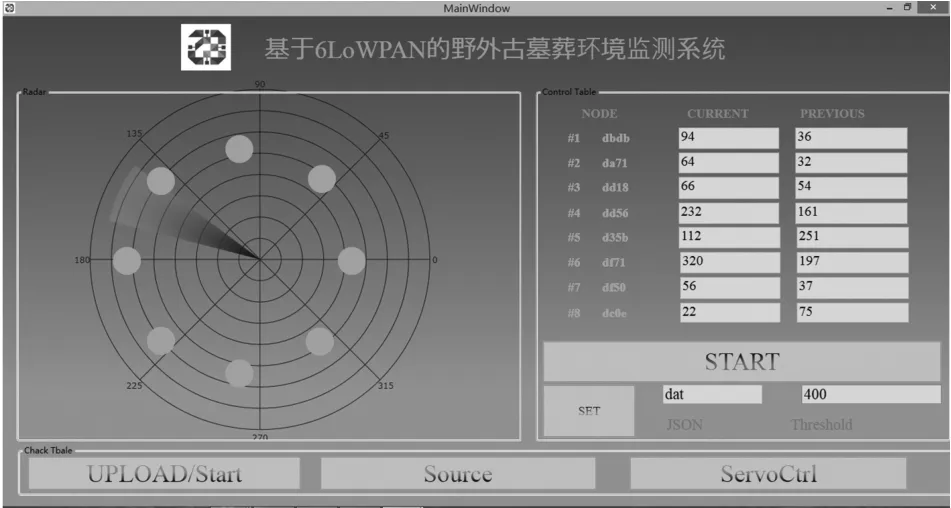
图12 系统运行主界面
5.2 系统测试
将传感器节点部署在户外30 m×30 m的区域内,按顺时针编号1号至8号.通过自组网建立传感器节点网络。系统开始初始化,图13的全部节点和位于区域中心的控制装置和上位机都准备就绪。

图13 节点与控制装置实物图
当区域内有人员按顺时针跑动,在上位机中可以看到1号节点区域由绿色变为红色,并闪烁指示,控制中心开启激光;紧接着,2号至8号节点依次闪烁,控制中心开启的激光依次顺时针旋转45°。
当测试逆时针跑动时,现象与顺时针类似,在上位机中也可以看到8号节点区域由绿色变为红色,并闪烁指示,控制中心开启激光;紧接着,7号至1号节点依次闪烁,控制中心开启的激光依次逆时针旋转45°。
当测试人员沿任意方向走动,在上位机中,震动区域由绿色变为红色,并闪烁指示,激光也跟随旋转。
以上测试结果验证了该系统能实现各节点与边界路由的自动组网,能采集到各节点震动数据并准确判断震源方位,从而实现远程监控报警,能取代现有铺设电缆的监控方式。
6 结束语
将无线传感技术应用到了野外文物古墓葬保护中,将现有的铺设电缆的方式改为6LoWPAN无线方式的监控,设计制作了一套完整的基于6LoW⁃PAN无线传感网络古墓葬监测与保护系统。系统的各项特点使其能直接投入市场使用成为了可能。经过反复测试,初步实现了对古墓葬外部环境的数据采集与传输。在后续研究过程中,大量扩展节点后可提高定位精度,可实现对野外古墓葬外部环境的更精准的实时监测。
[1]林弘.论文物古墓葬的保护意义及其利用[J].丝绸之路,2010(12):99-101.
[2]毛晓峰,杨珉,毛迪林.无线传感器网络应用综述[J].计算机应用与软件,2008,25(3):179-181.
[3]赵鹏,孙玫,钱海忠.基于移动机器人无线传感网络数据采集方法研究[J].电子器件,2013,36(6):881-884.
[4]贺超.机械振动无线传感器网络监测模式和网络传输协议研究[D].重庆:重庆大学,2009.
[5]李勇军.基于Contiki的远程家电监控系统的设计与实现[D].电子科技大学,2012.
[6]卢良进,徐向华,童超.无线传感网络协议分析技术研究与实现[J].传感技术学报,2009,22(12):1828-1833.
[8]贺超.机械振动无线传感器网络监测模式和网络传输协议研究[D].重庆:重庆大学,2009.
[9]孔凡天.无线传感器网络节点定位与数据融合技术研究及实现[D].华中科技大学,2006.
[10]张岩.基于Contiki系统的物联网应用平台设计与实现[D].哈尔滨:哈尔滨工程大学,2013.
[11]Xu Yang,Tan Ruochen,Wu Shuai,et al.Connect Internet with Sensors by 6LoWPAN[J].Journal of Networks,2013,8(7):1480-1487.
[12]Fu Wei,Chen Gang,Wang Ping,et al.Improvement of Home Ap⁃pliance Control System in Smart Home Based on 6LoWPAN[J].Journal of Computers,2014,9(1):183-188.
[13]Saima Zafar,Ali Hammad Akbar,Sana Jabbar,et al.Session Lay⁃er-Assisted Efficient TCP Management Architecture for 6LoW⁃PAN with Multiple Gateways[J].Network Business Weekly,2010,12(7):593-601.
[14]Wen-Tsai Sung.Designing an Industrial Real-Time Measurement and Monitoring System[J].Expert Systems with Applications,2011(38):4522-4529.
[15]Wen-Tsai Sung.Routing in IPv6 over Low-Power Wireless Person⁃al Area Networks(6LoWPAN)[J].Journal of Computer Networks and Communications,2012(5):1-10.
[16]Claudio Salvadori.Video Streaming Applications in Wireless Camera Networks:A Change Detection Based Approach Targeted to 6LoWPAN[J].Journal of Systems Architecture,2013(59):859-869.
[17]Shanthini J.Modifed Simple Network Management Protocol for 6LoWPAN[J].SciVerse ScienceDirect,2012(38):1024-1029.

李 艳(1972-),女,汉族,四川省仁寿县人,副教授,硕士生导师,主要研究方向为工业自动化,智能检测与智能控制,liyan@sust.edu.cn;

刘俊杰(1991-),男,汉族,安徽省临泉县人,陕西科技大学电气与信息工程学院硕士研究生,专业:控制理论与控制工程,主要研究方向为嵌入式系统与物联网技术,643626515@qq.com。
猜你喜欢
科学大众(2020年12期)2020-08-13
传媒评论(2019年5期)2019-08-30
车迷(2018年12期)2018-07-26
传媒评论(2018年4期)2018-06-27
传媒评论(2018年4期)2018-06-27
传媒评论(2018年2期)2018-06-06
中国公路(2017年18期)2018-01-23
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
