
小型无人机活塞式发动机测控仪设计
2015-03-07 05:40解涛,滕勤,宫向
中国测试 2015年7期
解 涛,滕 勤,宫 向
(合肥工业大学机械与汽车工程学院,安徽 合肥 230009)
小型无人机活塞式发动机测控仪设计
解 涛,滕 勤,宫 向
(合肥工业大学机械与汽车工程学院,安徽 合肥 230009)
为实现小型无人机活塞式发动机的机载和内、外场调试与测试,基于Freescale 16位双核微控制器设计便携式发动机测控仪。测控仪控制发动机节气门和停机,定时器中断触发A/D转换进行数据采集,液晶屏显示被测参数,并通过以太网通信接口将数据传输至数据管理系统。后台管理软件以图表形式显示被测参数,计算并绘制曲线。实验结果表明:测控仪可以满足发动机运行控制、多参数测量和高速数据传输的要求。
无人机;活塞式发动机;测控仪
0 引 言
小型无人机广泛应用于军事和民用领域。在军事领域,常用作靶机、侦察机、电子对抗机等;在民用领域,用于执行勘察测绘、气象探测、安保监控、农药喷洒、森林火灾防救等任务。作为无人机的核心,发动机的工作状态直接影响无人机的安全性和可靠性。因此,需要对无人机发动机进行定期性能检测、故障排查和飞行前试车。
中国民航大学和南京航空航天大学分别采用上、下位机结合的方式,研制试验台用无人机发动机测试系统,通过测量推力、扭力、转速和气缸温度,检测动力驱动系统的性能[1-2]。为解决无人机机体与发动机不分离造成的机载发动机参数测量问题,武汉军械士官学院基于虚拟仪器技术设计了无人机发动机试验检测系统[3],但仅限于采集发动机自身配置的传感器信号,如转速、缸温、油量、发电机电压、油门开度,而无法检测推力、扭力等参数。
本文设计了小型无人机活塞式发动机测控仪,结合上述两类测试系统的优点,可用于检测机载发动机和台架上的发动机。为满足维护保养和调试时的测试要求,增加了气缸压力、点火电流以及混合气浓稀状态等测量参数,拓展了检测系统的应用范围。
1 测控仪的总体结构
1.1 测控仪的组成
便携式测控仪的测试对象为二冲程活塞式螺旋桨无人机发动机。测控仪采用主/从控制模式,其结构如图1所示,可独立实现发动机的操控和稳态测量,在后台软件的支持下还可进行动态测量。主控制器以Freescale 16位双核微控制器MC9S12XET256为核心,负责采集、处理数据和停机控制,由图形点阵液晶显示模块实时显示测量参数,并通过以太网(Ethernet)接口将数据上传至后台数据管理系统。辅控制器为AT89S51微控制器,与主控制器之间采用带光电隔离的SCI接口电路通信,专门负责节气门控制。
1.2 测量参数与传感器配置
仪器可测参数和配置的传感器如表1所示。

图1 测控仪结构图
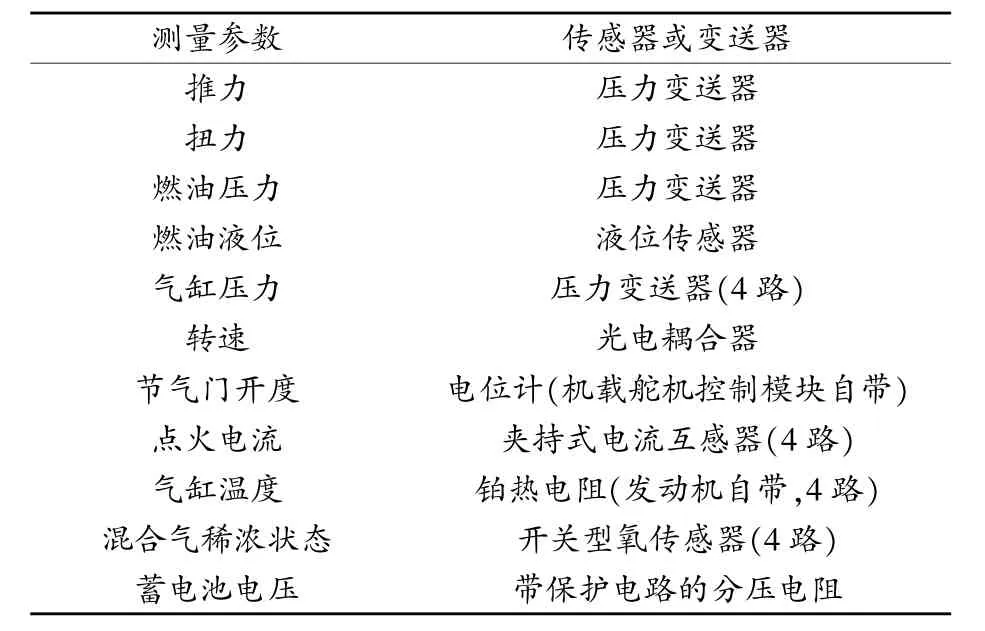
表1 测量参数和传感器配置
2 测控仪硬件设计
测控仪硬件电路由电源模块、信号调理电路、以太网通信接口、液晶显示模块、停机控制电路和节气门控制系统等组成。
2.1 信号调理
信号调理电路包括脉冲(转速)信号调理和模拟信号调理两部分。
脉冲信号调理电路负责对机载交流发电机输出信号(转速信号)进行限幅、隔离和比较。限幅电路由稳压二极管和限流电阻组成;为了避免发电机输出电压对测控仪产生干扰,发电机输出信号限幅后经光电耦合器隔离,由电压比较器LM2901转换为方波信号。
模拟信号调理电路负责对模拟信号进行滤波、限幅等处理。滤波电路为有源π型RC低通滤波器,用于消除点火系统带来的高频干扰。限幅电路用于限制信号电压,防止瞬间高电压窜入损坏A/D模块。限幅电路采用基于电阻平衡条件的正向比例运算电路,利用输入端电阻平衡原理使共模输出为零,同时补偿运放输入平均偏置电流及漂移影响[4]。
发动机的燃油压力、燃油液位、推力、扭力、氧浓度、缸压、点火等信号均采用模拟信号调理电路进行处理,直接接入主控制器片内的A/D转换模块。各缸的温度信号通过4个Pt100传感器测量,利用桥式电路将传感器电阻的变化转变为电压变化,由仪表放大器AD620放大后,接入一个8路模拟转换开关DG408,选通信号由主控制器通过I/O口产生。鉴于温度信号变化比较缓慢,DG408输出信号通过一个外置16位Δ-∑型A/D转换器ADS1100进行采样和量化,采样值由主控制器通过IIC接口读取。
2.2 以太网通信接口
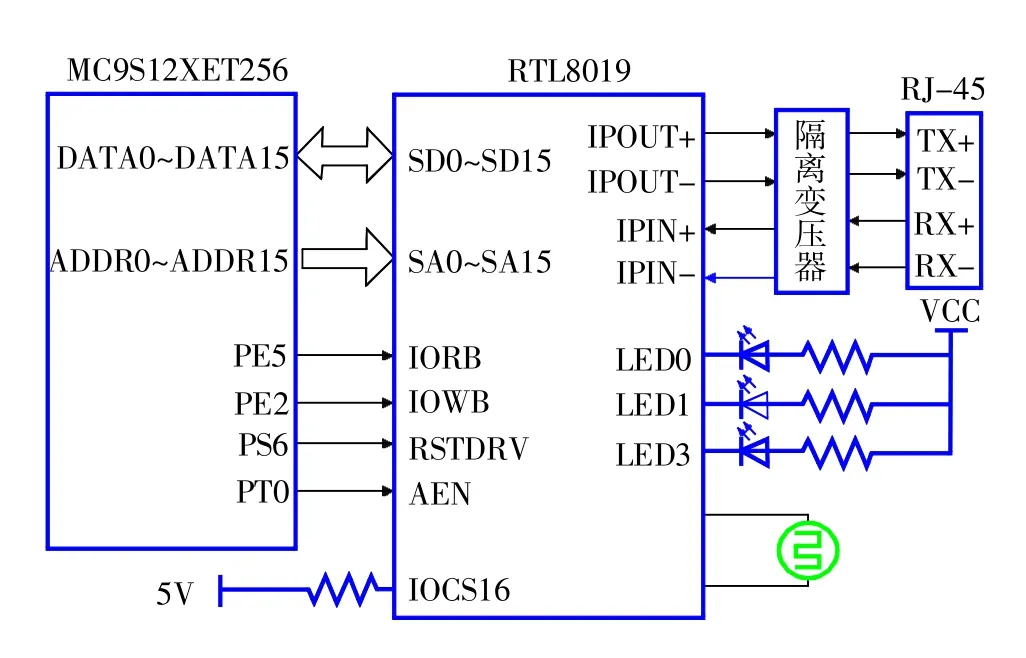
图2 以太网通信模块设计
主控制器与后台数据管理系统的信息交换通过Ethernet控制器RTL8019[5]实现,如图2所示。RTL8019的IOCS16引脚接5 V,选择16位数据总线模式。RL8019的数据总线SD[0:15]和地址总线SA[0:15]分别与主控制器的数据总线DATA(0:15)和地址总线ADDR(0:15)相连。RTL8019的读写控制线IORB、IOWB与主控制器的I/O口线PE5、PE2相连,RTL8019的复位线RSTDRV和片选线AEN分别与主控制器的I/O口线PS6、PT0相连。为了抑制高频干扰,RTL8019与RJ-45接口之间通过隔离变压器连接,可以实现带电插拔功能。
2.3 停机控制
发动机采用磁电机点火系统,停机控制原理如图3所示。发动机运转时,磁钢转子经过磁电机,充电线圈L1感应出交流电,经二极管D1半波整流后变成脉冲直流电向储能电容C充电。到达点火时刻时,线圈L2感应出交流电,经二极管D2整流后触发可控硅SCR,使之导通,电容C储存的电能经SCR迅速向点火装置释放,使点火线圈次级感应出高电压,通过火花塞点火[6]。
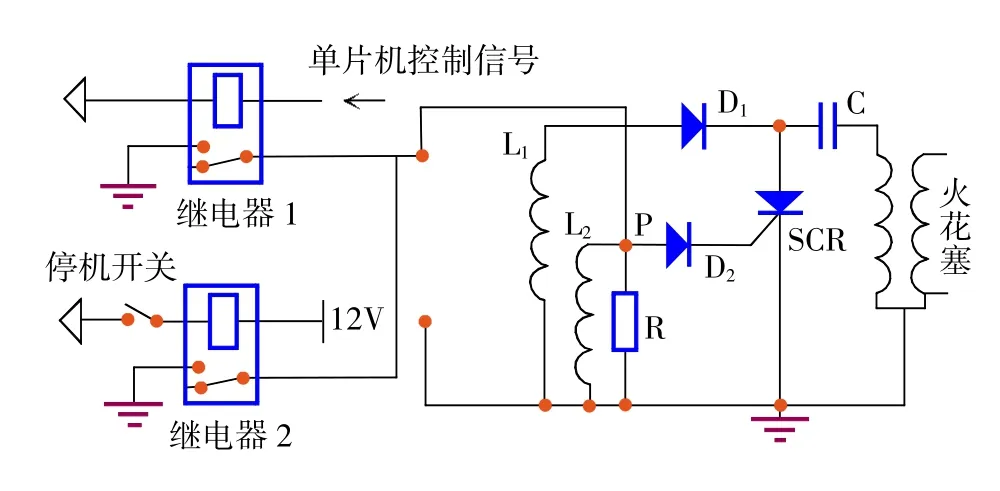
图3 停机控制原理图
为了使发动机安全可靠地停机,设置了手动和自动两种停机方式。按下仪器面板上停机开关或通过后台发送停机指令,则继电器2或继电器1通电,两个并联的常开触点之一闭合,线圈L2上的P点接地,L2感应出的电压被消耗,无法触发可控硅SCR导通,点火系统停止点火,发动机停机。
2.4 节气门控制系统
节气门控制系统由8位微控制器AT89S51、数字电位器AD5282和舵机控制模块组成,控制原理如图4所示。
舵机工作电压为±12V,控制输入为-3~3V模拟电压,内部集成有功放电路、直流伺服电机、减速器、摇臂和反馈电位器。AT89S51微控制器根据仪器面板上的可调电位器信号,通过IIC接口控制数字电位器AD5282,提供控制舵机所需的模拟电压。反馈电位器将当前摇臂位置反馈给输入处理电路,与控制输入进行比较并产生误差电压信号,由功放电路驱动电机转动,实现节气门位置的闭环控制。通过串联使用AD5282的两路通道,使输入信号的分辨力达到12 mV,整个节气门开度范围的控制准确度达到0.2%。
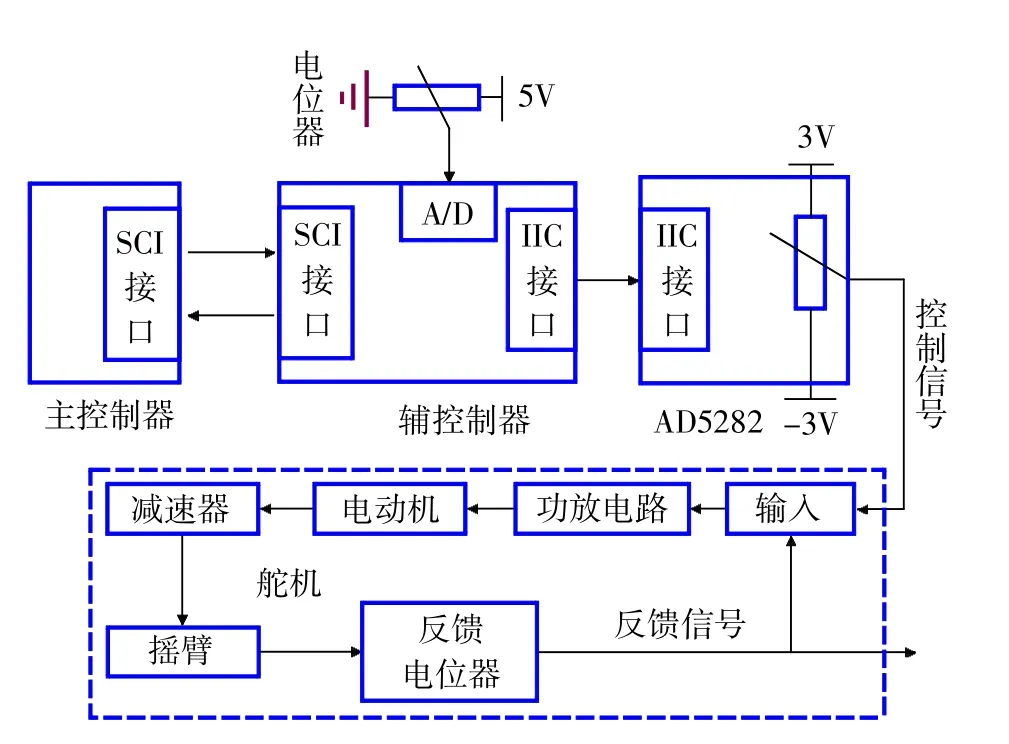
图4 舵机控制原理图
3 测控仪软件设计
测控仪软件采用基于任务优先级的模块化结构设计,通过划分软件系统任务并分配任务优先级,采用任务调度机制和中断服务体系,提高软件的执行效率。主要任务包括数据采集、舵机控制、转速计算、液晶屏刷新和数据传输等,各函数都有各自的执行标志位。系统启动后进入主函数,首先开启定时器模块,然后由主函数巡检执行标志位并进行函数调用。定时器模块的定时中断用于精确计时,并由中断函数负责任务计时和触发A/D转换,流程如图5所示。
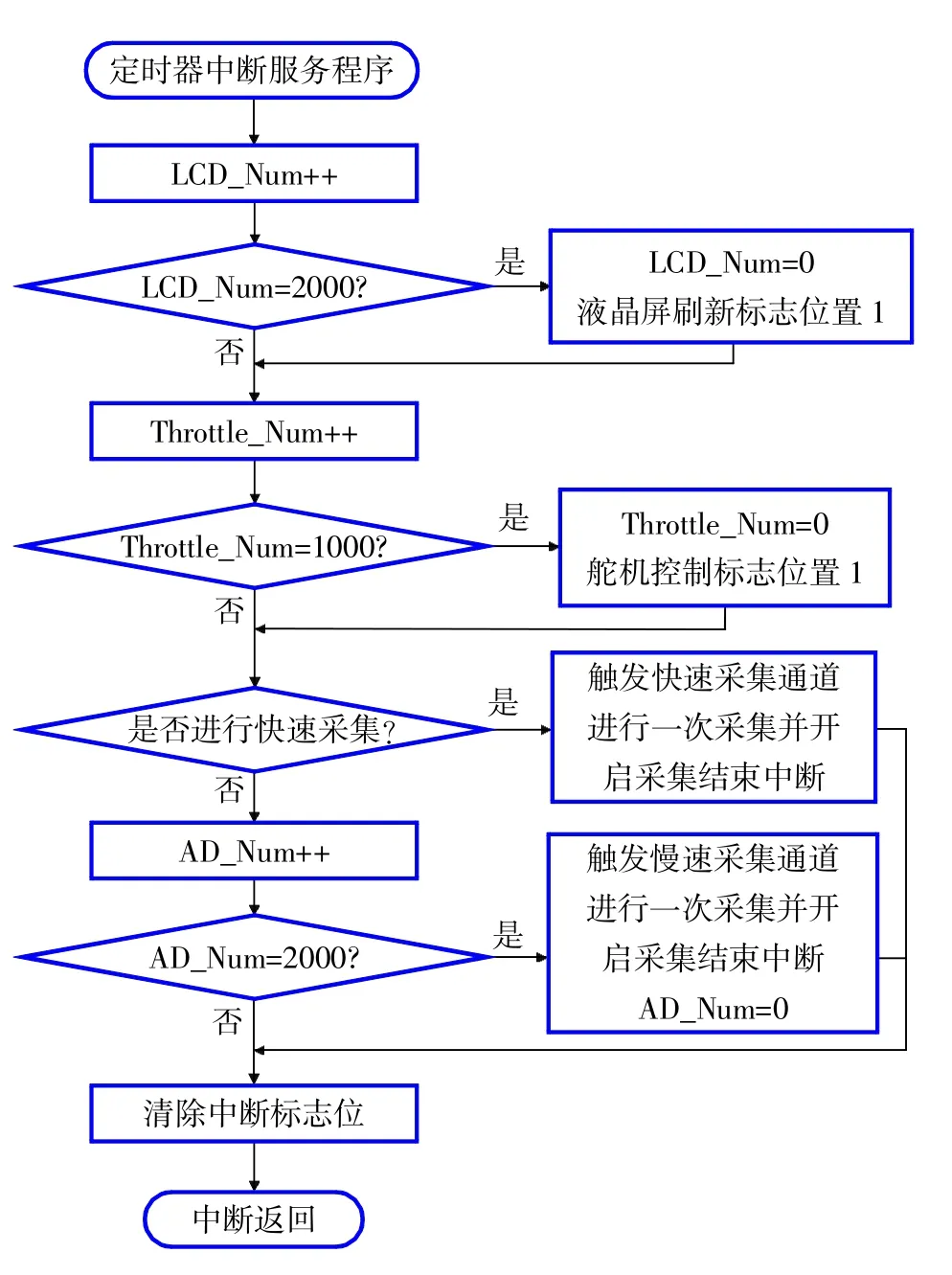
图5 定时器中断函数流程图
在任务体系中,液晶屏刷新函数负责更新液晶屏显示数据,更新频率为0.2s。舵机控制函数负责向节气门控制系统发送舵机位置控制指令,执行周期为0.1s。信号采集及数据传输函数由定时器中断触发,负责数据的读取、转换和传送。转速计算函数由输入捕捉中断触发执行,根据前后两次中断的时间间隔,采用测周法计算发动机转速。
4 实机测试
4.1 发动机台架
为满足内、外场地试车要求,研制了可移动式台架,台架上布置有蓄电池、供油装置、起动装置、测力装置、集线器等部件,结构简图如图6所示。
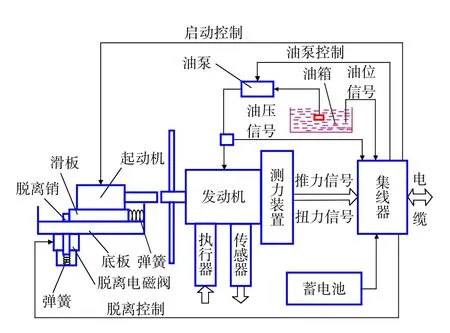
图6 实验台架结构简图
4.2 后台管理软件
为便于观测实验结果和进行数据统计分析,基于VB6.0开发环境和UDP协议开发了后台管理软件[7],通过以太网接口接收测控仪采集的数据,进行数据实时显示、曲线绘制、数据自动储存和动态回放,并具有推力与扭力传感器标定、舵机测试、停机测试等辅助功能。图7为后台管理软件主界面。
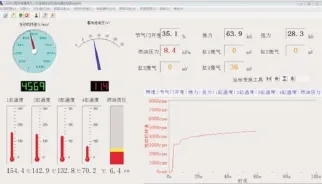
图7 后台管理软件主界面
4.3 试车实验
试车实验分为3个阶段:启动、转速调节和停机阶段。
启动阶段:发动机由起动机带动,达到一定转速后,发动机稳定点火燃烧,自行运转。此时需使发动机和起动机脱离,防止起动机烧坏。
转速调节阶段:在发动机稳定运转时,可以通过调节电位计来控制节气门开度大小,以此调节发动机转速。
停机阶段:试验结束时,将转速调整到怠速,然后按下主、辅停机开关,发动机停机。
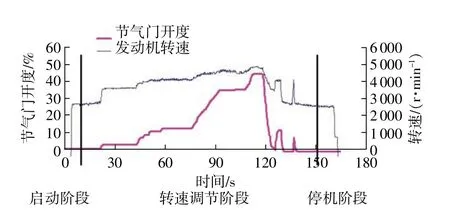
图8 转速随节气门变化曲线
由图8可见,在启动阶段,发动机节气门开度为4.5%时,发动机转速可维持在3000r/min。之后,随着节气门开度增加,发动机转速逐渐上升,转速与节气门开度的变化基本一致,具有很好的跟随性。
在发动机运行阶段,即使节气门开度为2.6%时仍可维持3000r/min转速。这是因为发动机运行一段时间后气缸温度升高,燃烧稳定性增加,在较小的节气门开度下仍保持稳定运转。整个试验过程中,测控仪能够稳定控制发动机运行。
发动机运行过程中气缸温度随转速变化曲线如图9所示,气缸温度随转速增加而上升,由于气缸温度传感器时间参数较大,气缸温度变化滞后于转速。当气缸温度高于一定限值(300℃)时,主控制器将输出停机信号,实现发动机自动停机。
发动机运转时的推力和扭力随转速变化曲线如图10所示。由图可知,推力和扭力随转速增加而增加。在低转速时,两者波动较大,这是因为节气门开度较小时,混合气浓度较大,燃烧不稳定。转速越高,发动机运转越平稳,推力和扭力的波动范围越小。
4.4 完好性检测
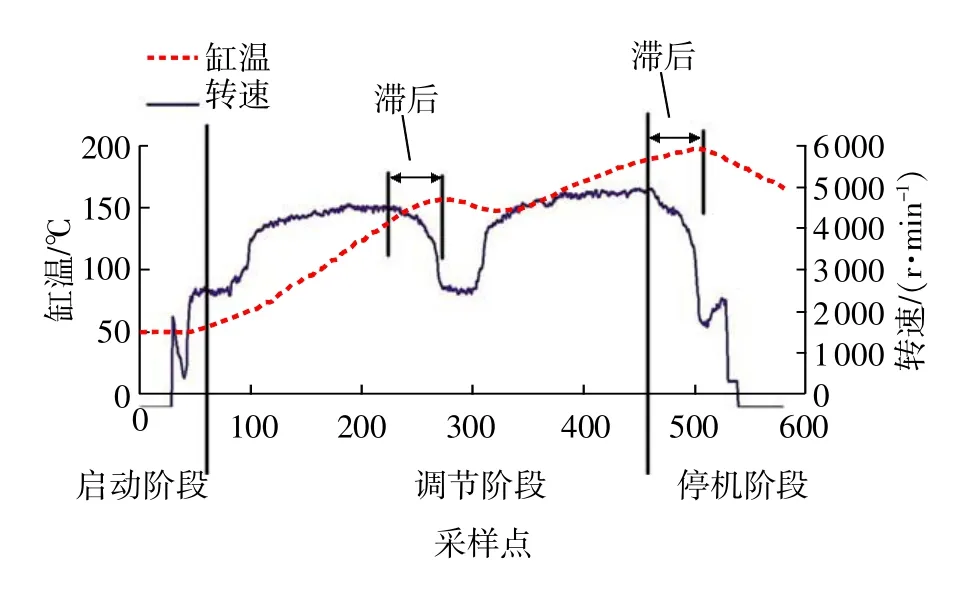
图9 缸温随转速变化曲线

图10 推力和扭力随转速变化曲线
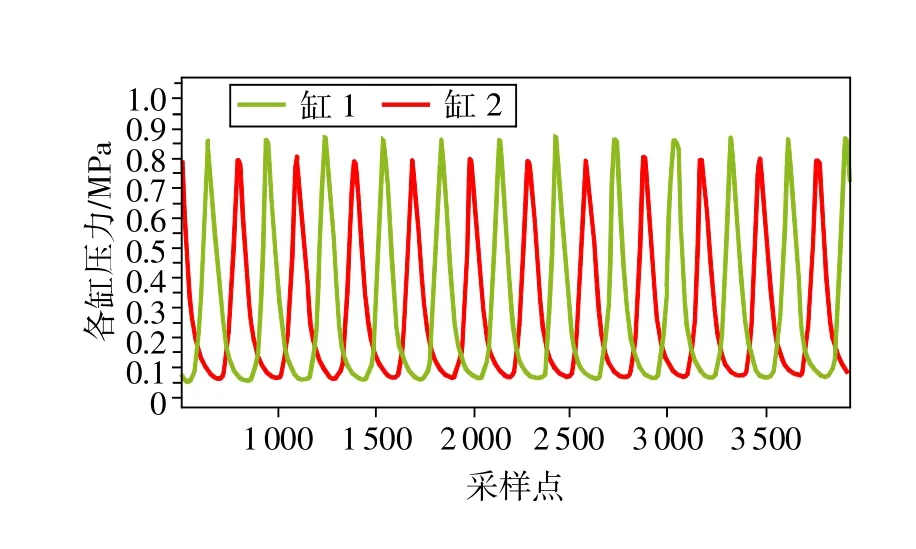
图11 气缸压力测量结果
完好性检测通过检测各缸的气缸压力来评判发动机的气缸密封性能或磨损状况。图11为采集到的缸压曲线,发动机压缩比为8.7,理论气缸最大压缩压力为0.87MPa。系统实测第1缸压力为0.85MPa,第2缸压力为0.8MPa。显然,第2缸的磨损程度比第1缸严重。
5 结束语
1)基于16位微控制器设计了测控仪,并通过SCI接口形成主/从网络,有效解决了发动机多参数测量和油门控制问题。通过采用隔离电路和屏蔽等措施,防止外界干扰对参数测量的影响;通过液晶显示使测控仪能够脱离后台软件独立工作。
2)安装在发动机上的传感器直接通过各自的电缆与测控仪连接,使得测控仪可以不依赖台架,灵活地用于机载测试,可兼顾台架试验和机载试验。
3)通过定时器中断触发A/D转换,保证了多参数测量数据的同步性。系统采样周期设为0.1ms,在发动机转速5000r/min时,一个信号周期内系统可以采集120个数据,足以反映被测物理量的变化过程。
4)对发动机节气门实现闭环控制,输入信号的分辨力达到12mV,控制整个节气门开度范围的准确度可达到0.2%。采用两套停机方式,有效地解决发动机故障时安全停机的问题。
5)采用以太网通信方式,传输速率可达960Kb/s,大幅度提高了数据传输能力。
6)后台管理软件以图表和曲线的形式灵活显示测量结果,便于简单直观地判断发动机的状态。
实验结果表明,测控仪能够满足发动机调试检测对数据采集及发动机控制的要求,能够用于对发动机进行调试、检测和试车。
[1]张翔,臧小杰.小型活塞式无人机发机测试系统[J].中国民航飞行学院学报,2011,22(1):38-40.
[2]Zhang Z Y,Du H L,Ding S B.Design and implementation of the testing system of small UAV’s piston engine[C]∥The 2010 International Conference on Information,Electronic and Computer Science,2010.
[3]王古常,鲍传美,杨毅,等.无人机发动机试验检测系统的软件设计[J].测控技术,2009,28(12):88-91.
[4]马敬敏.基于电阻平衡条件的比例运算电路[J].吉林大学学报,2012,30(2):127-130.
[5]罗军.一种便携式发动机动态参数测量仪的研制[D].合肥:合肥工业大学,2012.
[6]李昕哲.摩托车电子点火器的原理、制作与维修[J].摩托车技术,2005(12):39-40.
[7]Modesitt K L.Inductive knowledge acquisition experience with commercial tools for space shuttle main engine testing [C]∥Proceedingsofthe Fifth Conference on Artificial Intelligence for Space Applications,N90-27326,1990.
Design of measurement and control instrument for piston engine of small unmanned aerial vehicle
XIE Tao,TENG Qin,GONG Xiang
(School of Mechanical and Automotive Engineering,Hefei University of Technology,Hefei 230009,China)
In order to realize airborne,infield and outfield debugging and testing for small unmanned aerial vehicle(UAV),a portable engine measurement and control instrument is designed based on a Freescale microcontroller of 16 bit dual core.The throttle valve is controlled by the instrument which can achieve the shutdown of the engine.The data acquisition is performed by a timer interrupt to trigger A/D conversion.The measured parameters are displayed by a LCD screen and the parameters are transferred to the data managementsystem through the Ethernet communication interface.The measured parameters are also displayed in the form of graphs,and the parametric curves are drawn through calculation by the background management software.The experimental results show that the measurement and control instrument can meet the requirements for engine operation control,multi-parameter measurement and high-speed data transmission.
UAV;piston engine;measurement and control instrument
A
:1674-5124(2015)07-0068-05
10.11857/j.issn.1674-5124.2015.07.016
2014-10-29;
:2014-12-18
解 涛(1991-),男,安徽合肥市人,硕士研究生,专业方向为发动机动力学与控制。
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05
中国船检(2020年11期)2020-11-27
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年19期)2018-04-28
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
汽车维护与修理(2016年3期)2016-02-28
汽车维修与保养(2015年1期)2015-04-17
少先队活动(2014年6期)2015-03-18
