
多个不可分辨目标群的联合检测与估计误差界
2015-03-07 05:59连峰王婷婷韩崇昭
西安交通大学学报 2015年11期
连峰,王婷婷,韩崇昭
(西安交通大学电子与信息工程学院,710049,西安)
多个不可分辨目标群的联合检测与估计误差界
连峰,王婷婷,韩崇昭
(西安交通大学电子与信息工程学院,710049,西安)
针对杂波和漏检同时存在时多个不可分辨目标群联合检测与估计的性能评价问题,在随机有限集框架下,利用信息不等式和最优子模式分配距离提出了该问题的误差(下)界。首先将多个不可分辨目标群的状态建模为多Bernoulli随机有限集,并利用Mahler提出的连续个体目标数假设建模群目标测量似然函数;然后,结合最大后验概率检测和无偏估计准则获得了建议的误差界。仿真实验展示了该误差界随杂波密度和传感器检测概率的变化趋势,并利用不可分辨目标群势概率假设密度滤波器和不可分辨目标群势平衡多目标多Bernoulli滤波器对该误差界的有效性进行了验证。实验表明,利用该误差界可以对现有的不可分辨目标群联合检测与估计算法的性能进行有效衡量,使其在不同杂波密度和检测概率下的平均相对误差不超过7%。
误差界;不可分辨目标群;联合检测与估计;随机有限集
由于传感器分辨率的限制,导致多个相距较近的点或个体目标不能够被完全区分。将这一簇无法区分的点或个体目标视为一个整体,即为一个不可分辨的目标群[1]。目标群联合检测与估计(JDE)问题是指根据传感器测量同时估计群个数和存活群的状态,它是近年来一个新的研究热点。目前,国内外已有一些学者提出了该问题的研究方法[2-4]。
误差(下)界是指一个跟踪算法理论上所能达到的最小误差。传统的克拉美罗下界[5](CRLB)仅考虑了估计误差而非检测误差,故其不适用于JDE问题。随后,Rezaeian等在随机有限集(RFS)框架下提出了当杂波和漏检同时存在时单个点目标的JDE误差界[6];Tong等给出了该误差界在有漏检无杂波时的递推形式并将其扩展到无杂波无漏检时的多个点目标跟踪场景[7];连峰等给出了单个扩展目标的JDE误差界[8]。然而,至今为止还尚未有关于多个目标群JDE误差界的相关结论。
为解决此问题,通过将多个不可分辨目标群的状态建模为多Bernoulli RFS,并利用Mahler提出的连续个体目标数假设建模群测量似然函数,本文得到了杂波和漏检同时存在时基于最优子模式分配(OSPA)距离[9]的不可分辨目标群JDE误差界。仿真实验展示了该误差界随杂波密度和传感器检测概率的变化趋势,并利用不可分辨目标群势概率假设密度(U-CPHD)滤波器[3]和不可分辨目标群势平衡多目标多伯努利(U-CBMeMBer)滤波器[4]对该误差界的有效性进行了验证。实验结果表明,利用该误差界可以对现有的不可分辨目标群JDE算法的性能进行有效衡量,在不同杂波密度和检测概率下的平均相对误差不超过7%。
本文研究对于地面或海面集群目标监控、远距多目标编队运动、目标群的算法性能评估和传感器管理等领域[10]均有潜在的应用价值。本文目前仅关注于目标群静态JDE问题的误差界。
1 问题描述
单个不可分辨目标群的状态可建模为扩展矢量
(1)
式(1)中,x′用于建模位于同一状态x处的由一簇(a个)个体目标构成的不可分辨目标群的状态,其中L维列向量x=[x1,…,xL]T∈X⊂RL表示传统的单目标状态,a表示该不可分辨目标群所包含的个体目标数。根据Mahler提出的连续个体目标数概念,a∈A⊂R+为一个正实数,X′表示单个不可分辨目标群的状态空间,X′=A×X⊂R+×RL。
令多个不可分辨目标群的状态集合为X′,可建模为由N个独立的单Bernoulli RFSsX′(t)并构成的多Bernoulli RFS,即
(2)
式中:N表示目标群的最大个数;X′(t)表示单个不可分辨目标群的状态集合,密度为
(3)



(5)
式中:|X′|表示集合X′的势。
记单个传感器观测矢量z∈Z,其中Z表示观测空间。传感器观测集合由目标测量和杂波测量构成,可表示为
(6)

令ϑm(a,q)表示整数m≥0的广义二项式分布,由概率产生函数Ga,q(l)定义,利用ϑm(a,q),单个不可分辨目标群的似然函数可建模为[11]

(7)
式中:pD(xt)表示至少有一个源于第t个不可分辨目标群的观测被传感器收到的概率;φ(z|xt)表示传统的单目标单测量似然函数。
2 不可分辨目标群JDE误差界
RFS框架下不可分辨目标群JDE问题的均方误差可定义为
(8)

(9)

(10)
式中:c>0表示截断误差;Πn表示集合{1,2,…,n}的全排列;max(·)和min(·)分别表示取最大值和最小值运算;‖·‖2表示取2范数。
根据文献[1]中的基本卷积公式,可得总的传感器测量似然函数为
(11)
式中:W0⊕W1⊕…⊕W|X′|=Z表示若i≠j则Wi∩Wj=∅,且W0∪W1∪…∪W|X′|=Z,即W0,W1,…,W|X′|是Z的一个个数为|X′|+1的划分。
本文采用最大后验概率(MAP)检测准则估计不可分辨目标群的个数,给定测量集Z,目标群状态估计集合的势通过最大化后验概率得到,即

(12)
为了获得不可分辨目标群JDE误差界,需要利用信息不等式[11]:若X×Z上的联合概率密度f(x,z)满足正则条件,则
(13)

i,j=1,2,…,L
(14)
当且仅当条件概率密度f(x|z)满足高斯分布时,式(13)取“=”号。
定理1 若多个不可分辨目标群的状态集合和测量集合分别满足如式(2)所示的多Bernoulli模型和如式(6)所示的观测模型,那么其联合MAP检测与无偏估计的误差界为
(15)
其中
(16)
(17)
(18)
(19)
(20)
dz1…dzm
(21)
(22)
(23)

证明 给定观测集合Zm,可得
(24)
其中
(25)
(26)
(27)

(28)
将式(27)、(28)代入式(24),可得
(29)
对于MAP检测器,若满足
(30)

利用式(9)的集合积分定义,可将式(8)写为
(31)
再根据式(30)所示的MAP检测准则,将式(31)中的积分区域Zm划分为Z0,m,Z1,m,…,ZN,m,则
(32)

(33)
(34)
式中:Ωn,m为归一化因子。
将式(4)、(11)分别代入式(33)、(34),并对式(34)中的z1,…,zm积分后可得
(35)
根据式(33)和OSPA定义,式(32)可表示为
(36)
(37)
(38)

那么,根据式(37)、(38),式(36)可写为
(39)

(40)
根据式(40),可将式(39)中的积分项写为
(41)

(42)
(43)
(44)
将式(42)代入式(41)、(39),即可得式(15)。
3 仿真实验与分析

(45)
式中:U(·;εt)为在区间εt=[τ1,t,τ2,t]内均匀分布的概率密度函数(τ2,t>τ1,t>0),U(·;εt)=1/(τ2,t-τ1,t);N(·;x0,t,Qt)为高斯分布的概率密度函数,x0,t、Qt分别为均值和协方差矩阵。
不可分辨目标群的似然函数如式(7)所示,其中单目标单测量似然为
(46)
式中:h(xt)表示关于状态xt的观测函数;R表示测量噪声协方差矩阵。
假设传感器检测概率为pD(xt)=pD,t=1,…,N。假设杂波集合Κ为一个Poisson RFS,密度可表示为
(47)
式中:υ(z)=λφ(z)为杂波强度;λ为平均杂波数;φ(z)为单个杂波分布的概率密度。令φ(z)=U(z;S),其中U(·;S)为监控区域内均匀分布的概率密度函数,U(·;S)=1/S2。

在本例中,假定监控范围参数S=100,可能存在的不可分辨目标群的最大个数N=8,多个不可分辨目标群状态集合参数分别为:r1=r2=0.8,r3=r4=0.6,r5=r6=0.4,r7=r8=0.2,ε1=ε2=[2,4],ε3=ε4=[4,6],ε5=ε6=[6,8],ε7=ε8=[8,10],x0,1=[10,10]T,x0,2=[10,-10]T,x0,3=[-10,10]T,x0,4=[-10,-10]T,x0,5=[30,30]T,x0,6=[30,-30]T,x0,7=[-30,30]T,x0,8=[-30,-30]T,且
(48)
传感器观测函数和观测噪声协方差矩阵分别为
(49)
对不可分辨目标群的个体目标数和位置差的下界分别进行展示。令OSPA距离中的个体目标数截断误差为60,位置截断误差为500。
图1展示了在不同pD下建议的不可分辨目标群JDE误差界随λ的变化曲线,反映了给定不同的pD,建议的误差界并不总是随λ单调增,给定不同的λ,建议的误差界并不总是随pD单调减。这是因为当pD<1或λ>0时,λ或pD的增大均能同时产生降低群丢失的可能性和增加虚假群估计两个相反的作用,若前者占据主导作用,该界随λ或pD的增大而减小,否则该界随λ或pD的增大而增大。
本例利用U-CPHD滤波器和U-CBMeMBer滤波器两种算法对建议的界进行验证。由于目前该误差界仅关注于静态问题,因此在上述两种算法中,令每个目标群状态的时间演化模型为
(50)
图2给出了建议的界与上述2种算法的稳态误差的比较结果。从图2可以得出以下结论。
(1)对于不同的杂波密度和检测概率,尽管U-CPHD和U-CBMeMBer的平均OSPA距离曲线没有完全达到本文所建议的误差界,但两者均接近于该误差界,且后者的性能优于前者。这是因为U-CPHD和U-CBMeMBer算法本身均有不同程度的近似,
并且在它们的粒子滤波实现中,U-CPHD

(a)群内个体目标数JDE误差界
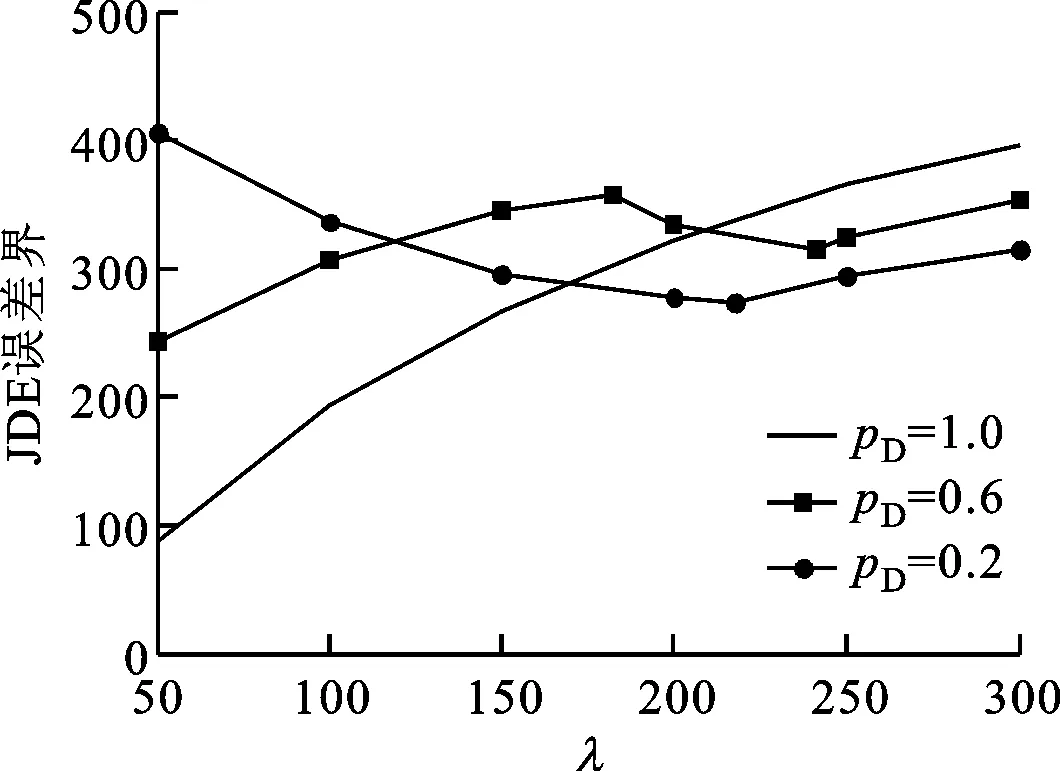
(b)群位置JDE误差界图1 不同pD下建议的不可分辨目标群JDE误差界随λ的变化曲线

(a)pD=1时群内个体目标数的JDE误差

(b)pD=1时群位置的JDE误差

(c)pD=0.6时群内个体目标数的JDE误差

(d)pD=0.6时群位置的JDE误差

(e)pD=0.2时群内个体目标数的JDE误差

(f)pD=0.2时群位置的JDE误差图2 U-CPHD和U-CBMeMBer算法的JDE误差与建议的界随λ的变化曲线
在状态提取步由于聚类还会引入额外误差,而U-CBMeMBer无需聚类便可直接提取状态。
(2)给定检测概率、杂波密度越大时,或者给定杂波密度、检测概率越低时,U-CPHD和U-CBMeMBer在执行过程中由于各自算法本身的近似或聚类等因素而增加的误差会越显著,导致它们的平均OSPA距离误差超过建议的误差界越多。两者中的最优值与该界相比:相对误差最大不超过12%;不同pD和λ下的平均相对误差约为7%。这说明本文建议的误差界能够正确反映这两个不可分辨目标群JDE算法可能达到的最优性能,可用作衡量该类算法性能的一个有效指标。
4 总 结
本文在RFS框架下,根据信息不等式提出了杂波和漏检同时存在时针对多个不可分辨目标群的JDE误差界。为了推导该误差界,首先采用多Bernoulli RFS和连续个体目标数假设建模目标群的状态和观测模型,并利用OSPA距离而非传统的欧式距离定义目标群估计状态集和真实状态集间的误差,最后结合MAP检测和无偏估计准则获得本文结论。仿真实验表明:利用该误差界可以对现有的不可分辨目标群JDE算法的性能进行有效衡量。
[1] MAHLER R. Statistical multisource multitarget information fusion [M]. Norwood, MA, USA: Artech House, 2007.
[2] MAHLER R. PHD filters for nonstandard targets: II unresolved targets [C]∥Proceedings of the 12th International Conference on Information Fusion. Piscataway, NJ, USA: IEEE, 2009: 922-929.
[3] LIAN F, HAN C Z, LIU W F, et al. Unified cardinalized probability hypothesis density filters for extended targets and unresolved targets [J]. Signal Processing, 2012, 92(7): 1729-1744.
[4] ZHANG G H, LIAN F, HAN C Z. CBMeMber filters for nonstandard targets: II unresolved targets [C]∥Proceedings of the 17th International Conference on Information Fusion. Piscataway, NJ, USA: IEEE, 2014: 1-8.
[5] TICHAVSKY P, MURAVCHIK C, NEHORAI A. Posterior Cramér-Rao bounds for discrete time nonlinear filtering [J]. IEEE Transactions on Signal Processing, 1998, 46(5): 1701-1722.
[6] REZAEIAN M, VO B N. Error bounds for joint detection and estimation of a single object with random finite set observation [J]. IEEE Transactions on Signal Processing, 2010, 58(3): 1943-1506.
[7] TONG H S, ZHANG H, MENG H D, et al. The recursive form of error bounds for RFS state and observation withPd<1 [J]. IEEE Transactions on Signal Processing, 2013, 61(10): 2632-2646.
[8] 连峰, 马冬冬, 韩崇昭. 扩展目标联合检测与估计的误差界 [J]. 西安交通大学学报, 2014, 48(4): 8-14. LIAN Feng, MA Dongdong, HAN Chongzhao. Error bound for joint detection and estimation for extended target [J]. Journal of Xi’an Jiaotong University, 2014, 48(4): 8-14.
[9] RISTIC B, VO B N, CLARK D, et al. A metric for performance evaluation of multi-target tracking algorithms [J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3452-3457.
[10]WAXMANN M J, DRUMMOND O E. A bibliography of cluster (group) tracking [C]∥Proceedings of the Signal and Data Processing of Small Targets. Belingham, WA, USA: SPIE, 2004: 551-560.
[11]POOR V. An introduction to signal detection and estimation [M]. New York, USA: Springer, 1994.
[12]陈强, 李伟华, 吴婷, 等. 数值积分函数对超声波流量计精度的影响 [J]. 西安交通大学学报, 2012, 46(9): 21-25. CHEN Qiang, LI Weihua, WU Ting, et al. Influence of numerical integration on error of ultrasonic flowmeter [J]. Journal of Xi’an Jiaotong University, 2012, 46(9): 21-25.
[本刊相关文献链接]
刘聪,李颖晖,刘勇智,等.采用高阶终端滑模观测器的执行器未知故障重构.2015,49(9):126-133.[doi:10.7652/xjtuxb201509021]
张东伟,郭英,齐子森,等.采用空间极化时频分布的跳频信号多参数联合估计算法.2015,49(8):17-23.[doi:10.7652/xjtuxb201508004]
巴斌,郑娜娥,朱世磊,等.利用蒙特卡罗的最大似然时延估计算法.2015,49(8):24-30.[doi:10.7652/xjtuxb201508005]
成玮,张周锁,何正嘉.采用信息理论准则的信号源数估计方法及性能对比.2015,49(8):38-44.[doi:10.7652/xjtuxb 201508007]
杨晴霞,曹秉刚,徐俊,等.一种估计锂电池充电状态的分数阶阻抗模型.2015,49(8):128-132.[doi:10.7652/xjtuxb 201508021]
韩玉兰,朱洪艳,韩崇昭.采用随机矩阵的多扩展目标滤波器.2015,49(7):98-104.[doi:10.7652/xjtuxb201507017]
刘凯,张立民,孙永威,等.利用深度玻尔兹曼机与典型相关分析的自动图像标注算法.2015,49(6):33-38.[doi:10.7652/xjtuxb201506006]
熊涛,江桦,崔鹏辉,等.应用基扩展模型的混合信号单通道盲分离算法.2015,49(6):60-66.[doi:10.7652/xjtuxb2015 06010]
郝双晖,王磊,宋宝玉,等.交流伺服系统永磁同步电机电流及位置二级状态观测器设计.2015,49(5):100-107.[doi:10.7652/xjtuxb201505016]
连峰,马冬冬,韩崇昭.扩展目标联合检测与估计的误差界.2014,48(4):8-14.[doi:10.7652/xjtuxb201404002]
(编辑 赵炜)
Error Bounds of Joint Detection and Estimation for Multiple Unresolved Target-Groups
LIAN Feng,WANG Tingting,HAN Chongzhao
(School of Electronics and Information Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
Aiming at the performance evaluation of joint detection and estimation (JDE) for multiple unresolved target-groups in the presence of clutters and missed detections, an error (lower) bound is proposed using information inequality and optimal sub-pattern assignment distance within the random finite set (RFS) framework. Firstly, the states of multiple unresolved target-groups are modeled as a multi-Bernoulli RFS, and the group observation likelihood is modeled based on the assumption of the continuous individual target number proposed by Mahler. Then, the maximum posterior probability detection criteria and unbiased estimation criteria are used in deriving the proposed bound. Experimental results show that the proposed bound can effectively indicate the performance limits of JDE algorithms for the existing unresolved target-groups, and the average relative error is less than 7% for various clutter density and detection probability.
error bound; unresolved target-group; joint detection and estimation; random finite set
2015-02-01。
连峰(1981—),男,副教授。
国家自然科学基金资助项目(61473217);陕西省自然科学基金资助项目(2014JQ8333)。
10.7652/xjtuxb201511015
TP274
A
0253-987X(2015)11-0089-07
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
科学与信息化(2021年30期)2021-12-24
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
雷达与对抗(2020年2期)2020-12-25
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
遥测遥控(2015年2期)2015-04-23
