
用GPS静态测量做地质勘探区首级控制的应用解析
2015-03-08 07:55肖福辉
吉林地质 2015年1期
肖福辉
吉林省有色金属地质勘查局六O七队,吉林 吉林市132105
0 引言
随着GPS技术在测绘领域的应用,由于这是一项新的技术,它的应用范围、方法、精度等许多方面和传统测量方法有啥区别与不同,他的优点又在哪里等方面引起了同行的关注,这篇文章是把我们的工作实例举出来供大家参考。
1 测区概况
地质勘探区首级测量控制网是将国家测量系统引入工作区作为工程勘探的测量基础。为了使控制网更加稳固达到勘探区控制测量的精度要求一般采用三角形布设法,由于勘探区工程测量多采用RTK动态方法施工,对正基点和校正点之间的误差对下一步测量没有乘系数误差的影响;这样从工作方便、节省资源和保证控制点精度的方面考虑,在以高级控制网为基础布设测区内控制点时,多采用单三角形方法布设,点位选择一般在路边及车辆易于到达的地方,并保证相邻点之间相互通视和有足够的边长以备其他测量方法的使用。该例以测区外围10 km内的两个国家三等点(西大和松江)作为起算点布设网型。见图1。
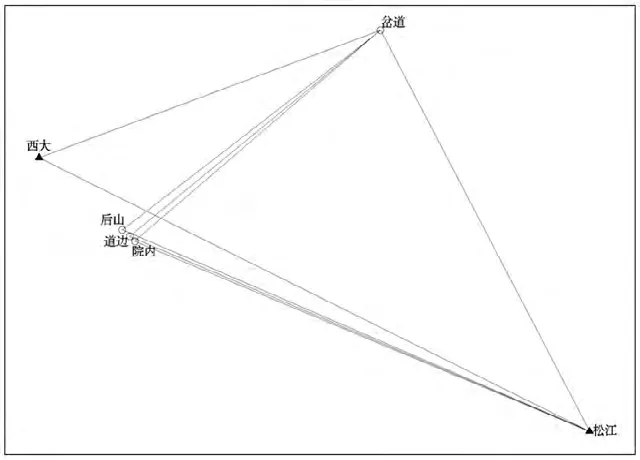
图 1 控制网点位分布图Fig.1 Distribution map of control network points
2 执行规范
该控制网执行《全球定位系统(GPS)测量规范》、《地质矿产勘查测量规》。GPS网技术指标见表1、表2。

表 1 GPS网技术指标Table 1GPS network technical indicators

表 2 GPS网技术指标Table 2 GPS network technical indicators
3 数据采集
施测使用三台南方测绘生产的S86GPS接收机,按D级点要求布设及观测,各同步环观测时间均大于60 min,历元间隔:30°,高度截止角大于15.0°,接收机自然采集数据后输入南方测绘的测量平差软件进行解算。
4 解算精度情况
(1)各边解算精度见表3;

表 3 各边解算精度Table 3 Each side calculating precision

表 4 同步环精度表Table 4 Synchronous ring precision
(2)闭合环最大节点数: 3个,闭合环总数:4个,同步环总数:4个,异步环总数:0个。
(3)同步环情况 :其精度见表4。(4) WGS84坐标系经典自由网平差平差结果。三维自由网平差单位权中误差 :0.048 751(m),基线及其改正见表5。
基线最弱边中误差: 1:271 775<1/40 000达到了规范规定的要求精度指标;
差后Wgs84坐标和点位精度见表6。
(5)当前坐标系统: 1980西安坐标系3度带椭球长半径: 6 378 140.000 000;椭球扁率:1/298.257;控 制 等 级 :D 级 -2009;M0:1.000 000;H:0.000(投影高);B0:0.000 000 000N;L0:0.000 000 000E(中央子午线 ) 129.000 000 000E ;N0:0.000 000(北向加);E0:500 000.000(东向加)。①采用网配合法进行转换:其精度见表7。②单位权中误差:0.001 332 (m);③平差后坐标和点位精度:见表8。
(6)参数拟合高程:①拟合高程差值:-25.650 239 ;②内符合精度中误差 ±412.534(mm)。
(7)坐标成果表:见表9。
(8)七参数结果 : Dx 平移 (m): 6.311 ; Dy平移 (m): -7.504 ; Dz 平移 (m): -9.026 ;Rx 旋转(″ ): 0.418 070 ;Ry 旋转 (″ ): -1.004 840 ; Rz 旋转(″ ): 4.335 320 ; SF 尺度 (×10-6): -1.471 203。
5 评述
此控制网是于去年五月上旬在延吉南部山区布设施测的,该地区山高林密,交通不便,工作条件比较困难,尽管如此,整个测量各点均取得了较好的测算精度,各项指标均达到了执行规范规定的要求,测量成果能够满足地质勘探工作的需要。由于GPS接受机是对空接受信号,工作无需横向通视的条件,在林深树密的地区,只要选择合适的点位和施工时间仍然可以取得较好的控制测量的工作成果,同时也节省了人力物力、也避免对自然生态环境的影响和破坏。所以在林区控制测量采用GPS静态方法是较好的选择,能起到多快好省的经济和社会效果。

表 5 基线改正表Table 5 Baseline correction
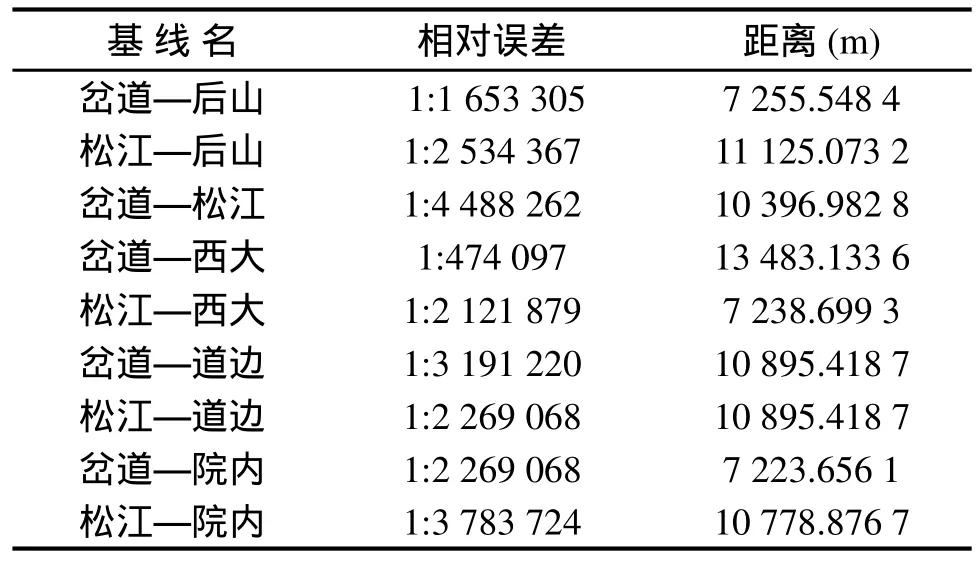
表 7 基线相对精度表Table 7 Baseline relative accuracy

表 6 平差后Wgs84坐标和点位精度Table 6 Wgs84 coordinates and positional accuracy after adjustment
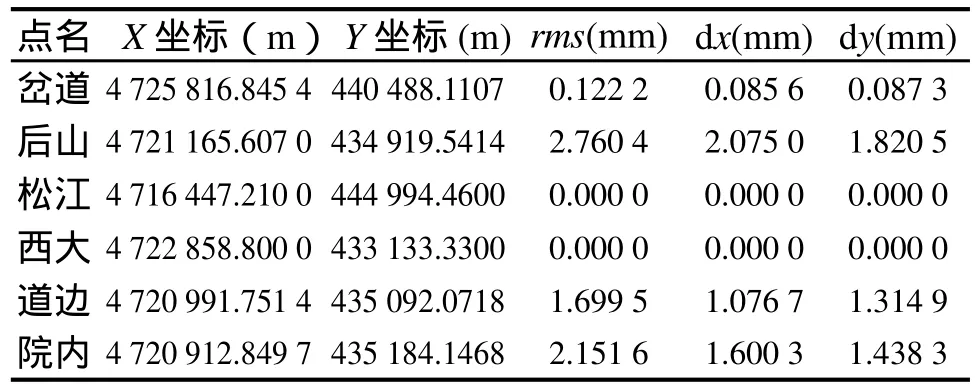
表 8 平差后坐标和点位精度表Table 8 Coordinates and positional accuracy after adjustment

表 9 坐标成果表Table 9 The coordinate results
[1] GB/T18314-2001,全球定位系统(GPS)测量规范[S].
[2] 赵长胜. GPS控制网设计与数据处理[M].北京:教育科学出版社,2001.
[3] 刘基余.GPS卫星导航定位原理和方法[M].北京:科学出版社,2003.
猜你喜欢
装备制造技术(2021年4期)2021-08-05
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
制造技术与机床(2018年12期)2018-12-23
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
舰船电子对抗(2016年5期)2016-12-13
测绘科学与工程(2016年4期)2016-04-17
