
倾斜安装火炮反天顶攻击目标技术研究*
2015-03-09 06:33徐国亮王勇王海川
现代防御技术 2015年1期
徐国亮,王勇,王海川
(江苏自动化研究所,江苏 连云港 222061)
倾斜安装火炮反天顶攻击目标技术研究*
徐国亮,王勇,王海川
(江苏自动化研究所,江苏 连云港222061)
摘要:针对天顶攻击或高角俯冲反舰导弹等目标的威胁,分析了近防舰炮武器系统在作用范围、伺服性能、跟踪误差等方面存在的问题。提出了采用基座倾斜安装火炮对付天顶攻击目标的技术措施,在目标高角情况下可大幅降低对跟踪伺服系统的要求、摇摆误差对跟踪误差的影响。给出的倾斜安装火炮坐标变换及采用瞄准线坐标系求解天顶攻击目标运动参数方法,可为舰艇近程防御系统反天顶攻击或高角俯冲目标提供技术参考。
关键词:高速;天顶攻击;反舰导弹
0引言
反舰导弹在现代海战中扮演着重要的角色。随着军事科学技术的进步,各国/地区装备的第1代亚声速反舰导弹逐步让位于射程更远、速度更快的新一代反舰导弹。同时为了提高反舰导弹的打击能力,新一代反舰导弹通常采用高空巡航与末端大角度或天顶俯冲攻击相结合模式。
近程反导舰炮武器系统作为舰艇反导防御的最后屏障,具有战斗持续时间长、反应时间短、发射率高、效费比大、适装性强等特点,可以有效地防御突袭反舰导弹,弥补了近程防空导弹及其他软硬防空武器的不足,成为近程防御中不可缺少的一员。
基于以上原因,本文分析了国内现役近程防御舰炮武器系统在防御俯冲攻击目标存在的不足,给出了倾斜安装火炮系统对俯冲目标的优势,力求为舰艇近程防御系统反天顶攻击或高角俯冲目标提供技术参考。
1需求分析
1.1反舰导弹发展现状
海战中,反舰导弹一直是水面舰艇的主要威胁。当今世界经过实战检验的反舰导弹还是以“亚声速低空掠海+末端机动”突防为主的攻击模式。如美国的“捕鲸叉”、法国的“飞鱼”等,如表1[1]所示。
(1) 低空掠海
对传感器火控雷达来说,需要克服低角多路径效应的影响(影响系统反应时间、跟踪及其精度)。
(2) 末端机动
规避舰艇近程防御武器拦截(严重影响近程防空导弹、小口径速射舰炮系统等精度)。
1.2反舰导弹的高空突防+末端俯冲攻击
随着新型战舰防御能力的提高,老式反舰导弹将更加难以穿过现代舰艇的警戒防御圈。进入20世纪90年代,反舰导弹升级换代的速度明显加快,各国研制的新一代反舰导弹都朝着高声速、高机动的方向发展,以获得前所未有的打击优势[2]。
导弹采用不同的弹道攻击目标时,其射程是不同的。采用高空飞行,射程能增长近一倍。因此超声速反舰导弹通常进行中、高空飞行,末端大角度或天顶俯冲攻击[3],如图1所示。

图1 高空突防+末端俯冲攻击弹道Fig.1 High altitude penetration and end dive attack trajectory
据报道,某俄式导弹能以70°高角从40 000 m高空以4Ma高速进行俯冲攻击。因此,天顶攻击目标(zenith target)已成为近防系统必须面临和对抗的威胁。
1.3其他威胁
联合直接攻击弹药(joint direct attack munition,JDAM)[4-5]:用常规炸弹升级而来,利用GPS引导自动寻的炸弹,能从24 km高空投下精确落在目标上。
由此可见,天顶攻击或高角俯冲目标愈来愈成为舰船面临的主要威胁,由于该类目标的攻击角度较高,而高角跟踪是现役舰炮武器系统的跟踪盲区,从而防御系统无法实现对该类目标有效拦截,本文主要就舰炮武器系统反天顶攻击目标存在的问题及解决的措施进行讨论。
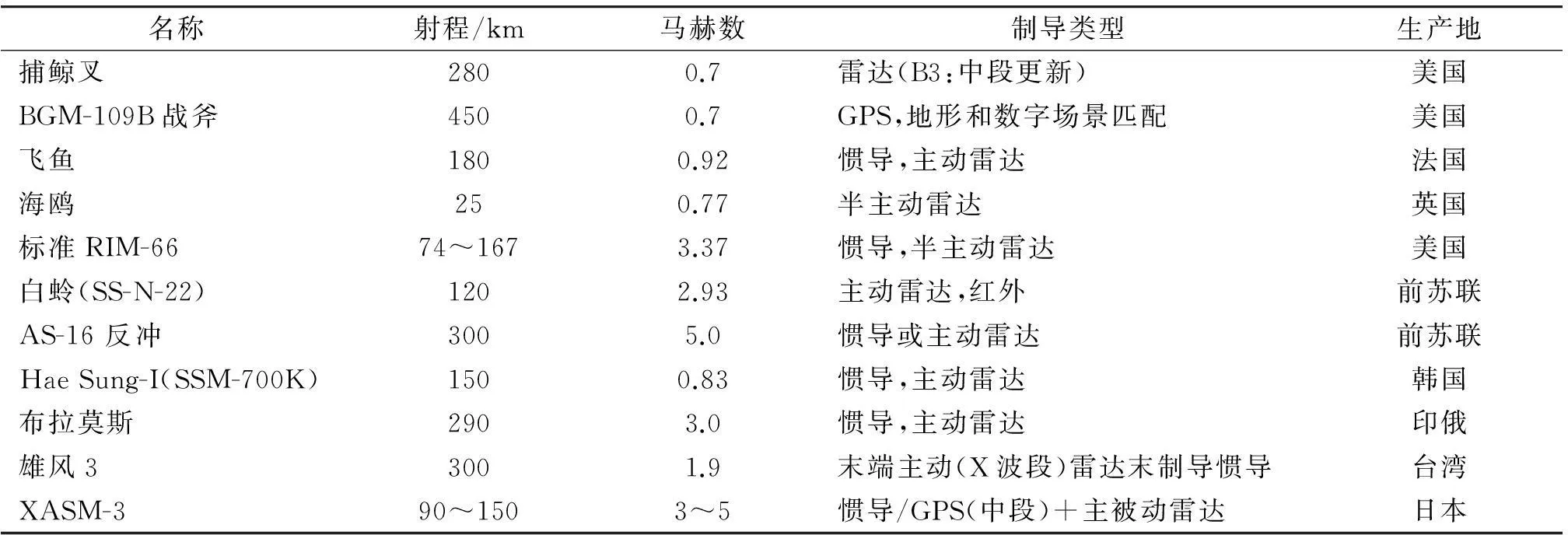
表1 各国/地区发展的主要反舰导弹
2反天顶攻击目标存在问题分析
现役防御武器系统的跟踪传感器大都采用两轴跟踪结构,这种结构本身的缺陷导致了天顶盲区,对天顶攻击目标无法稳定跟踪。另一方面,天线指向角度过高,也会放大跟踪器的方位瞄准误差,导致系统无法跟踪。
2.1系统作用范围
“天顶攻击目标”正处于“密集阵”、“守门员”、“海拉姆”等西方国家海军普遍装备的近防武器系统的盲区[6-8],如表2为国外近防武器系统俯仰角作用范围。
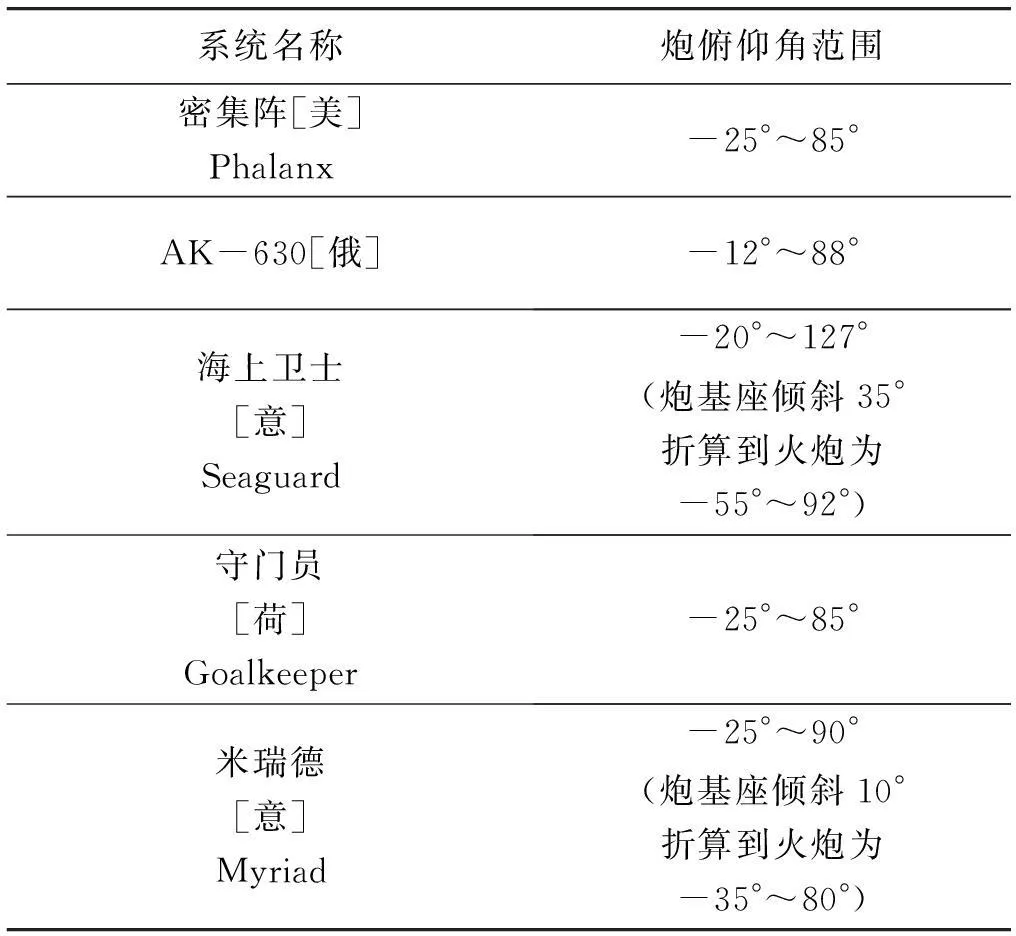
表2 国外近防武器系统俯仰作用范围
2.2跟踪伺服速度特性分析
反天顶攻击目标不是简单一个角度范围的问题,其中涉及到武器系统本身的跟踪、瞄准角(加)速度及其误差等问题。
针对典型目标的速度、捷径等目标运动态势进行分析,令常数A=v/S0,其中v,S0分别为目标速度和航路捷径,捷径点的方向角为0°,则目标方向角、角速度和角加速度分别为[9]

(1)
目标方向角及其变化曲线如图2所示。
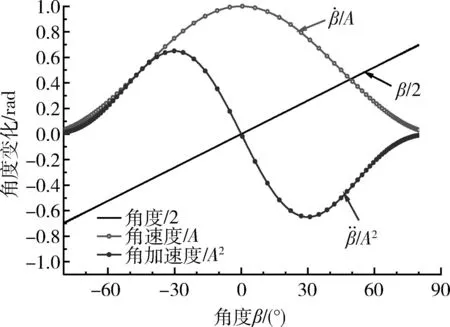
图2 目标方向角及其变化曲线Fig.2 Target direction angle and its change curve
当目标过天顶时,航路捷径S0很小,即航路常数A很大,根据图2可知,当目标高速靠近时,跟踪目标所需的角(加)速度迅速增大,如果系统(传感器和武器)跟踪能力无法满足跟踪目标所需角(加)速度的要求,则会造成目标跟踪精度严重下降或目标丢失。
2.3跟踪伺服精度特性分析
在目标不同俯仰角情况下,目标瞄准误差、摇摆误差对目标跟踪伺服精度影响不同,尤其是在目标高角时影响较为明显。
2.3.1瞄准误差影响分析
如图3为跟踪指向器瞄准线坐标系Oaxayaza,其中Δq,Δε为舷角和俯仰角瞄准偏差角。于是甲板坐标系下目标坐标(xd,yd,zd)及指向角(qd,εd)为

式中:

qa,εa为目标舷角和俯仰角。

图3 瞄准线坐标系与瞄准偏差角Fig.3 Coordinate system of line of sight and aiming deviation angle
令传感器舷角为qa=0,则有
sinqd≈sin Δq/cosεd.
因此在目标不同俯仰角情况下,甲板坐标系目标舷角跟踪误差与跟踪传感器舷角瞄准误差的关系为

(2)
式中:σqd为甲板坐标系目标舷角跟踪误差;σΔq为跟踪传感器舷角瞄准误差。
2.3.2摇摆误差影响分析
以最简单的静止目标为例,设定我舰不动,目标舷角q=0,俯仰角为ε。假设纵摇角为0,横摇角有一个幅度为σθ的噪声波动Δθ。于是由舰艇摇摆变换可得,甲板坐标系下目标舷角和俯仰角为

即
tanqd≈-sin Δθtanεd.
因此,在目标不同俯仰角情况下,甲板坐标系目标舷角跟踪误差与摇摆误差的关系为

(3)
由式(2),(3)可知,不论是瞄准误差还是摇摆误差,随着目标俯仰角的增大,在甲板坐标系舷角跟踪误差急剧放大,如图4所示。

图4 随俯仰角不同瞄准误差和摇摆误差的放大倍数Fig.4 Amplification with the elevation of different pointing errors and swing errors
由分析可知,对于高速、高角俯冲目标的跟踪,要求近防武器系统的跟踪伺服系统具有高带宽、高精度性能,使得系统难以对该类目标进行有效跟踪和拦截。
3反天顶攻击目标技术分析
为了对付天顶攻击目标,有的国外近防系统采用火炮基座倾斜安装方式,如图5所示。本文以“海天顶”(sea zenith)近防炮[10]为研究对象,分析其反天顶攻击目标时系统的相关处理方法及主要技术特性分析。

图5 基座倾斜安装的“海天顶”火炮Fig.5 slant-mounted “sea zenith” gun
3.1火炮安装基座倾斜时数据变换处理
如图6,甲板坐标系Oxdydzd固联于舰艇。Oyd轴平行艏艉线(舰艏为正),Oxd轴与Oyd轴垂直且平行于甲板面(右舷为正),Ozd轴与轴Oxd,Oyd构成右手直角坐标系。火炮倾斜坐标系Oxlylzl固联于火炮安装基面。Oyl平行安装基面指向最大倾斜角抬起方向,Oxl轴与Oyl轴垂直且平行于安装基面(右侧为正),Ozl轴与轴Oxl,Oyl构成右手直角坐标系。
设火炮安装基座平面Oxlyl与甲板平面Oxdyd的夹角为αl(“海天顶”火炮基座倾斜角αl=35°),且夹角方向对应的舷角为ql,即Oyq和Oyl的夹角为αl,Oyq和Oyd的舷角为ql。
从甲板坐标系到火炮倾斜坐标系变换为

式中:


3.2倾斜安装火炮伺服系统特性
分析倾斜安装后对火炮伺服的影响。如图7所示给出了在不同俯仰角下倾斜安装火炮与目标舷角变化曲线。由图可知当目标俯仰角小时,舰炮舷角变化率与目标舷角变化率相当。当目标俯仰角大于55°时,舰炮舷角变化率大大低于目标舷角变化率,即对舰炮跟踪角速度要求大幅降低。
下面分析倾斜安装后火炮伺服的俯仰角范围。假设火炮指向最低角度-20°(实际倾斜火炮俯仰角为-55°),计算在不同舷角对应甲板舷角和俯仰角,如图8所示。当火炮舷角90°时,对应甲板俯仰角约为-42°。
据此倾斜安装火炮在理论上可覆盖上半球空域。如火炮倾斜安装在甲板舰艏,火炮俯仰角在舰艏可低至-20°,而左右舷可低至-42°。
3.3倾斜安装时摇摆误差对舷角误差影响
公式(3)表明,目标俯仰角的变大,会放大摇摆误差,造成舷角跟踪误差急剧放大。这里,以纵横摇误差均值0,均方差1 mrad为例,仿真不同目标俯仰角情况下,基座倾斜安装时摇摆误差对舷角误差的影响,如图9所示。
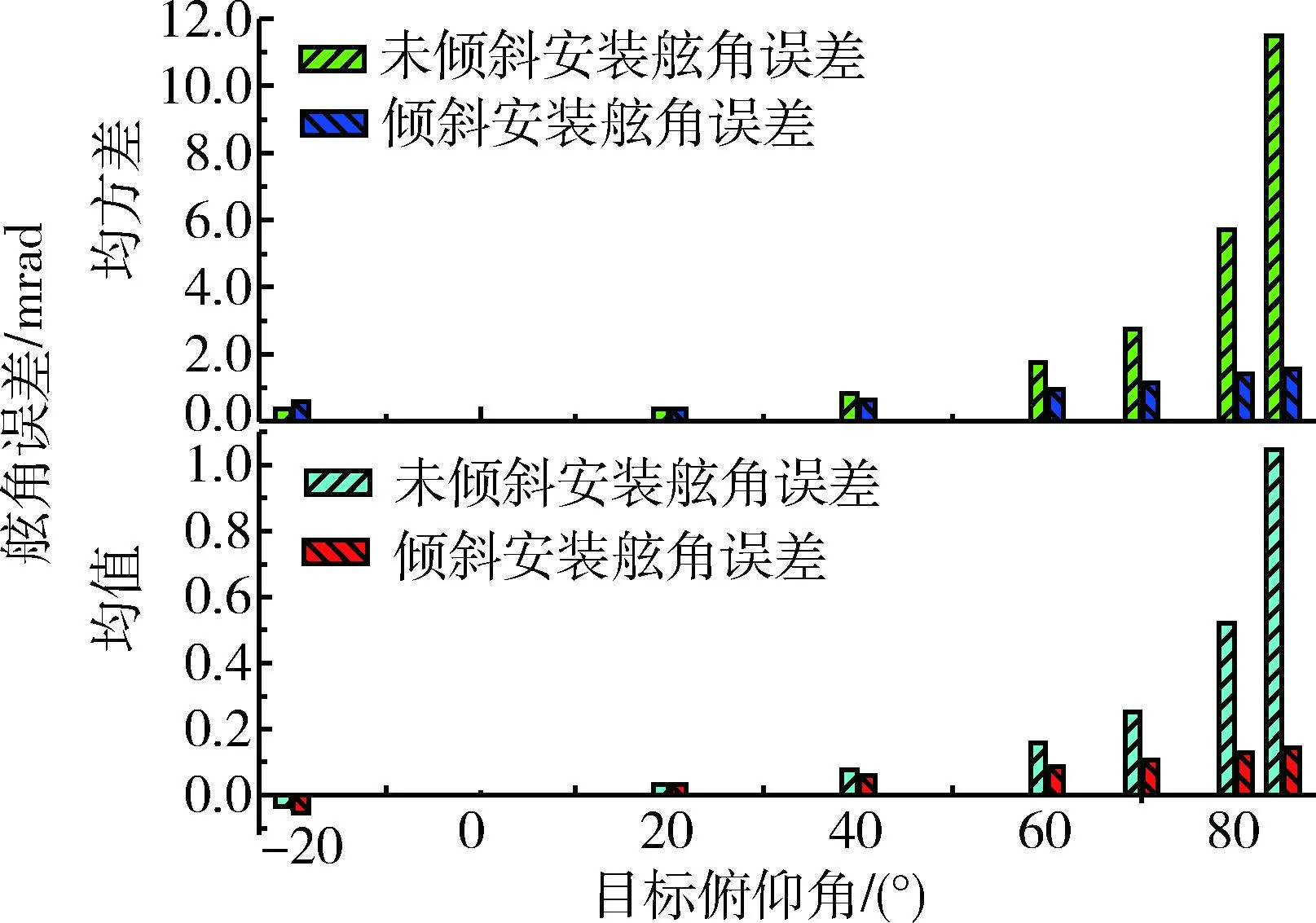
图9 是否倾斜安装火炮舷角误差比较Fig.9 Side angle error comparison of slant-mounted gun with level-mounted gun
可以看出:
(1) 火炮未倾斜安装时低俯仰角(如50°以下)情况下,舷角误差与摇摆误差相当或略大于摇摆误差,但高俯仰角情况下,误差迅速增大;
(2) 在负俯仰角情况下,倾斜安装火炮的舷角误差略大,但都小于摇摆误差;
(3) 由于火炮基座倾斜安装降低了火炮伺服的俯仰角,因此在目标高角情况下舷角误差受摇摆影响不大。
3.4天顶攻击目标运动参数解算
相比低空掠海来袭目标,天顶攻击目标在俯仰或高度方向变化剧烈。为求解这类目标运动参数,通常需专门针对俯仰角或高度方向建立运动模型[11]。
本文在考虑末端自防御条件下,给出在瞄准线坐标系下求解天顶攻击目标运动参数的方法。此时目标运动被分解为瞄准线径向、侧向(方向/俯仰),即对掠海、俯冲或天顶攻击目标运动的描述可不加区分,如比例导引、蛇形、俯冲等都作为侧向机动考虑。
瞄准线坐标系是一个运动的非惯性坐标系,其坐标按跟踪指向器法线方向来定位。这种坐标系在连续时间里和跟踪指向器系统一起转动,但在一个解算工作周期内与惯性系相对静止,因而称其为“步进”坐标系[12]。它已被广泛应用于国外现代火控领域。其特点在于:
(1) 瞄准线坐标系坐标轴方向与跟踪传感器测量相互对应,各坐标量测值之间互不相关,克服了传统在直角地理坐标系中进行强制分解,忽略其相关性带来的精度损失。
(2) 在瞄准线坐标系中进行滤波,系统模型与物理过程相吻合,传感器的原始测量信息能得到充分利用。
(3) 在瞄准线坐标系进行目标运动建模,可简化某些特定模式的目标运动模型的描述,如侧向机动。
4结束语
超声速、超高声速、高超声速反舰导弹的发展,天顶攻击或高角俯冲必然对近程防御系统提出新的挑战。从前面分析来看,反天顶攻击目标问题的解决是一个系统性的问题,涉及传感器和火炮的安装及其伺服系统的跟踪、瞄准,火控模型算法等各方面。
当然,火炮基座倾斜安装将使得火炮重心、后坐力等发生变化,对火炮伺服系统设计、供弹系统设计都会带来较大影响。
参考文献:
[1]Anti-Ship Missile[EB/OL].(2012-07-31)[2013-07-10]. http://en.wikipedia.org/wiki/ Anti-ship_missile.
[2]毕士冠. 国外超声速巡航导弹发展战略与技术途径讨论(下)[J]. 飞航导弹, 2007(2):1-3.
BI Shi-guan. Discuss the Development Strategy and Technological Approaches of Foreign Supersonic Cruise Missile(Final Volume)[J]. Winged Missles Journal, 2007(2):1-3.
[3]吴新宏. 日本大力发展新一代反舰武器—ASM-3空对舰导弹[J]. 现代舰船, 2011(1):42-45.
WU Xin-hong. Japan is Vigorously Developing a New Generation of Anti-Ship Weapons —ASM-3 Air to Ship Missle[J]. Modern Ships, 2011(1):42-45.
[4]范金荣. 制导炸弹发展综述[J]. 现代防御技术, 2004, 32(3):27-28.
FAN Jin-rong. Review of the Development of the Guided Bomb[J]. Modern Defence Technology, 2004, 32(3):27-28.
[5]Garrett Kasper.Joint Direct Attack Munition (JDAM) [EB/OL].(2012-01-31)[2013-07-10].http://www.boeing.com.
[6]《国外反导舰炮武器系统》编委会. 国外反导舰炮武器系统[M]. 北京: 国防工业出版社, 1995:13-25.
‘Foreign Anti Missile Shipborne Gun Weapon System’ Editorial Board. Foreign Anti Missile Shipborne Gun Weapon System[M]. Beijing: National Defense Industry Press, 1995:13-25.
[7]康郦, 陈涛. 欧美与俄罗斯CIWS系统比较[J]. 导航与雷达动态, 2003(2):34-39.
KANG Li, CHEN Tao. The Comparison of CIWS System of Europe and the United States and Russia[J]. Navigation and Radar, 2003(2):34-39.
[8]李浩源. 舰艇防御系统向何处去[J]. 现代军事, 2003(6):32-34.
LI Hao-Yuan. Ship Defence System Where to Go[J]. Modern Military, 2003(6):32-34.
[9]王勇, 徐国亮, 王全胜.近程舰炮武器系统拦截高速目标发展研究[J]. 现代防御技术, 2013, 41(3):12-17.
WANG Yong, XU Guo-liang, WANG Quan-sheng. Development Study of A Future Close-in Shipborne Gun Weapon System Intercepting High-Supersonic Targets [J]. Modern Defence Technology, 2013, 41(3):12-17.
[10]杨宇刚. 舰载CIWS小口径舰炮过天顶技术[J]. 船舶工程, 1991(3):36-41.
Yang Yu-gang. Shipborne CIWS Small Caliber Gun Over Zenith Technology[J]. Ship Engineering, 1991(3):36-41.
[11]张丕旭, 石章松, 刘忠. 一种基于弹道模型的机动目标跟踪算法[J]. 弹箭与制导学报, 2009,29(4):55-57.
ZHANG Pi-xu, SHI Zhang-song, LIU Zhong. A Maneuvering Target Tracking Algorithm Based on Ballistic Model[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2009,29(4):55-57.
[12]戴自立, 谭庆海, 谢荣铭,等. 现代舰载作战系统(下册)[M]. 北京:兵器工业出版社, 1990:159.
DAI Zi-li, TAN Qing-hai, XIE Rong-Ming, et al. Modern Shipborne Combat System(Volume Two)[M]. Beijing:Weapon Industry Press, 1990:159.
Zenith Attack Target Countermeasures Based on Slant-Mounted Antimissile Shipborne Gun
XU Guo-liang, WANG Yong, WANG Hai-chuan
(Jiangsu Automation Research Institute,Jiangsu Lianyungang 222061, China)
Abstract:When a shipborne close-in gun weapon system operates against the target with zenith attack or with high-angle dive, it will meet some problems in system coverage, servo capability and tracking error. To solve those problems, the countermeasure of a slant-mounted shipborne gun is proposed to greatly reduce the requirements for the tracking servo capability and decrease the tracking angle error caused by rolling error. The coordinate’s transformation for the slant-mounted shipborne gun and the method of calculating the parameters of target motion are also proposed. Those means can be offered as some technical advices for the ship close-in defense system operating against the target with zenith attack or with high-angle dive.
Key words:high speed; zenith attack; antiship missiles
中图分类号:TJ30;TJ761.1+4
文献标志码:A
文章编号:1009-086X(2015)-01-0007-06
doi:10.3969/j.issn.1009-086x.2015.01.002
通信地址:222061江苏省连云港市102信箱4分箱E-mail:XUGL716@163.com
作者简介:徐国亮(1971-),男,江西丰城人。研究员,硕士,研究方向为舰炮武器系统、火控系统。
基金项目:“十二五”国防预研项目
收稿日期:2013-07-10;
修回日期:2013-12-30
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
指挥控制与仿真(2018年1期)2018-03-19
兵器知识(2017年10期)2017-10-19
齐鲁周刊(2016年8期)2016-09-07
科技视界(2016年6期)2016-07-12
科教导刊·电子版(2016年2期)2016-03-12
方圆(2016年1期)2016-01-16
雷达与对抗(2015年3期)2015-12-09
海军航空大学学报(2015年1期)2015-11-11
