
基于开环穿越频率的伪攻角反馈驾驶仪设计
2015-03-10 10:34张亚婷
航天控制 2015年3期
张亚婷 王 伟
北京航天自动控制研究所,北京100854
近年来,三回路自动驾驶仪结构应用广泛[1],其具有良好的系统稳定性、快速性和鲁棒性[2]。在三回路驾驶仪的设计中,系统期望闭环极点由时间常数、阻尼系数和自振频率共同决定,如果能直接提出系统闭环自振频率指标,则可利用经典极点配置的方法,求解设计参数[3]。但一般情况下,自振频率的提出需要大量的工程经验,往往很难准确获得;同时由于舵机、加速度计和角速率陀螺等硬件及滤波器等部件的动态特性,对系统稳定性的影响无法忽略,设计中需要在各硬件对应频率处对相位进行有效补偿。因此,对系统开环穿越频率的研究更有工程价值[4]。
本文首先介绍一种新结构的三回路自动驾驶仪,即伪攻角反馈过载驾驶仪[5],在此基础上,分析考虑开环穿越频率约束的极点配置设计方法,并进一步考虑伺服特性,在引入附加极点的情况下,将系统开环穿越频率设计至期望值附近。
1 伪攻角反馈过载驾驶仪
伪攻角反馈过载驾驶仪有2种构造方式,分别以加速度信息和姿态角速率信息计算伪攻角。从数学方面分析,2种构造方式完全等价;从工程实现方面,一种利用了加速度计的测量信号,一种利用了角速率陀螺的测量信号,2种方式都没有增加对硬件资源的要求[6]。图1所示为一种以姿态角速率信息获得伪攻角的驾驶仪结构框图(其中kg,ωi,ka为各回路反馈系数,GACT,Ggz,GAC分别表示伺服机构、速率陀螺和加速度计)。
与典型结构三回路驾驶仪相比较,伪攻角反馈过载驾驶仪同样由阻尼回路、增稳回路、过载回路构成。但伪攻角反馈过载驾驶仪的增稳回路信号不再是过载信息与姿态角速度信息差的积分,而是过载积分后与计算得到的伪攻角之差。理论上,伪攻角反馈在加速度计硬件性能较高的情况下,控制能力更好。
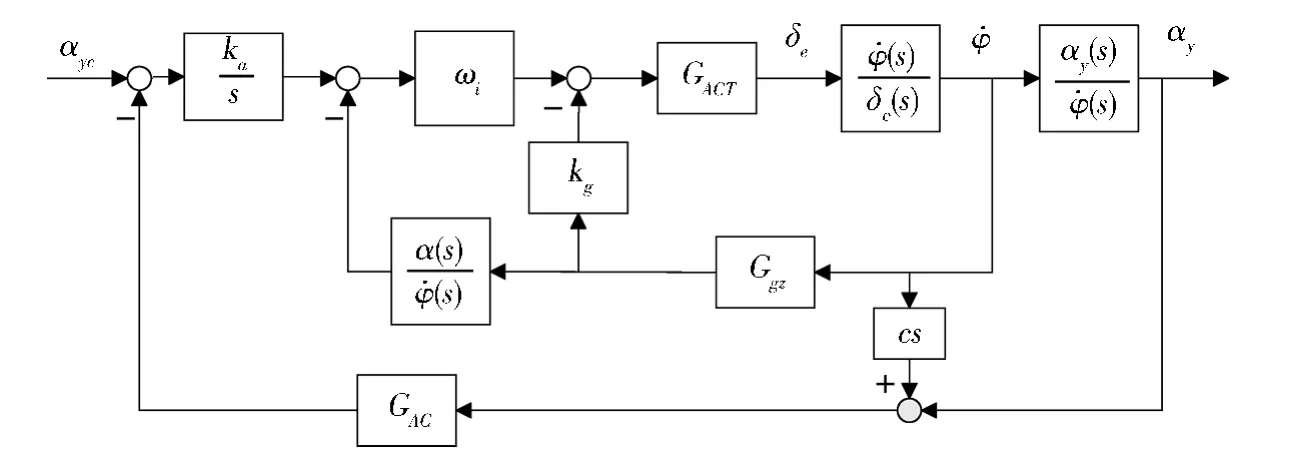
图1 伪攻角反馈过载驾驶仪结构图
2 开环穿越频率约束的极点配置设计
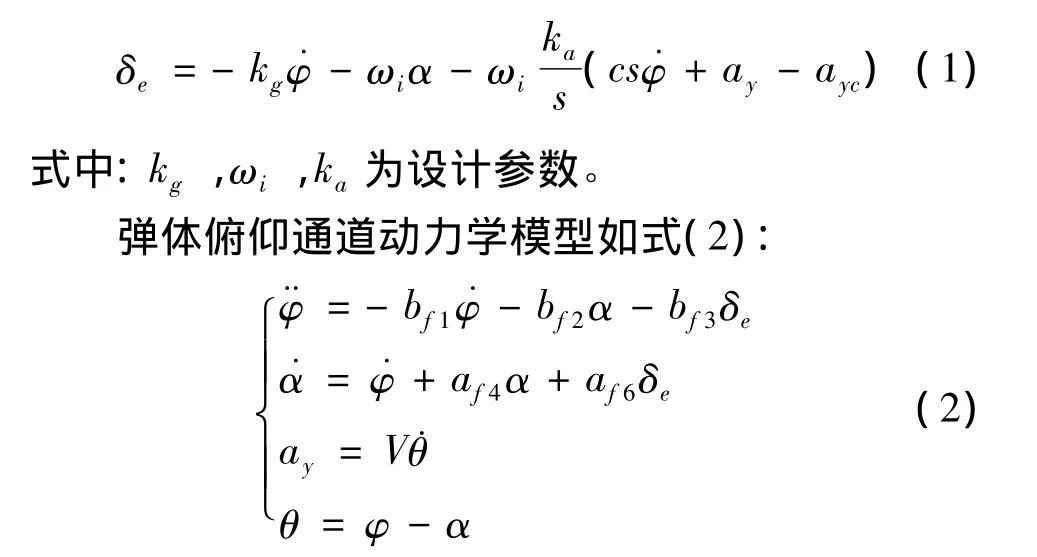
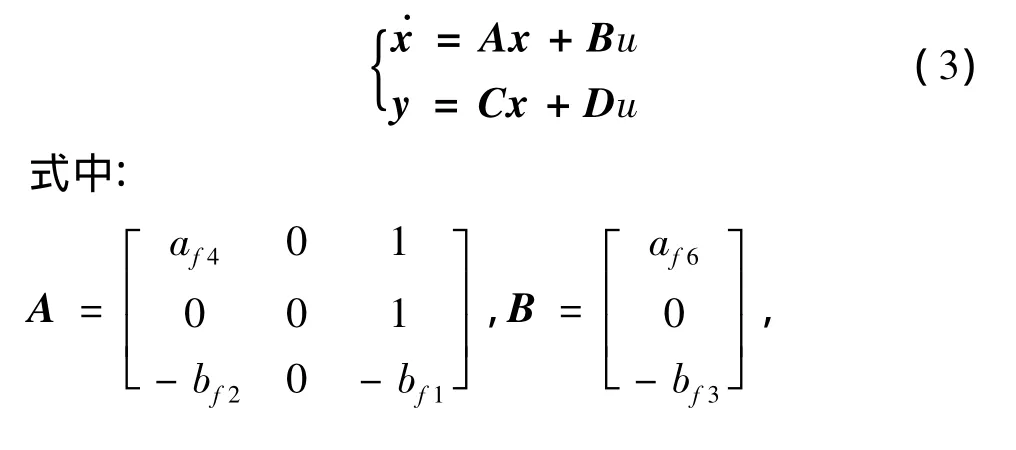
不考虑舵机、加速度计、角速率陀螺等硬件以及滤波器动态特性的影响,并假设GACT=Ggz=GAC=1,将驾驶仪在舵机处断开,各回路反馈等效到δe处,得到:
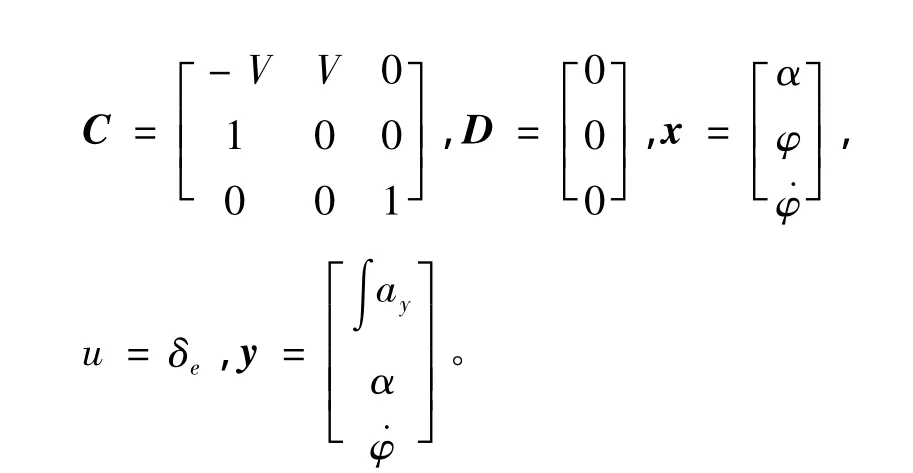
分析伪攻角反馈过载驾驶仪结构框图(图1),显然,驾驶仪为输出反馈形式,则系统状态空间方程描述为:
伪攻角反馈过载驾驶仪为三阶系统,理论上,由时间常数τ、阻尼μ与自振频率ωn决定其动态性能,但实际工程中,开环穿越频率ωc较自振频率ωn更有价值,并更易获得。因此使用τ,μ和ωc作为驾驶仪设计指标。
系统满足一定的条件时,输出反馈与状态反馈之间可以相互转化[6]。具体地,不妨令:u=-Kx+r,u=-Fy+r分别为状态反馈、输出反馈的控制方程,则当C-1,(I-KC-1D)-1均存在时,有如下关系:

结合图1分析可知,极点配置设计后系统开环传递函数描述为:

获得系统开环传递函数后,即可计算ωc。
基于开环穿越频率约束的极点配置是一个循环设计的过程。由于一组确定的τ,μ和ωn经过极点配置后,对应一个系统开环穿越频率ωct,即ωct=f(ωn),并且f(ωn)是连续的。因此,实际设计中,使用“连续搜索法”:给定一系列连续的ωn,在每一个值点,计算闭环期望极点,使用matlab中的place命令,求出状态反馈矩阵K,结合式(4)和(5)计算ωct,取“粗搜索”指标为:
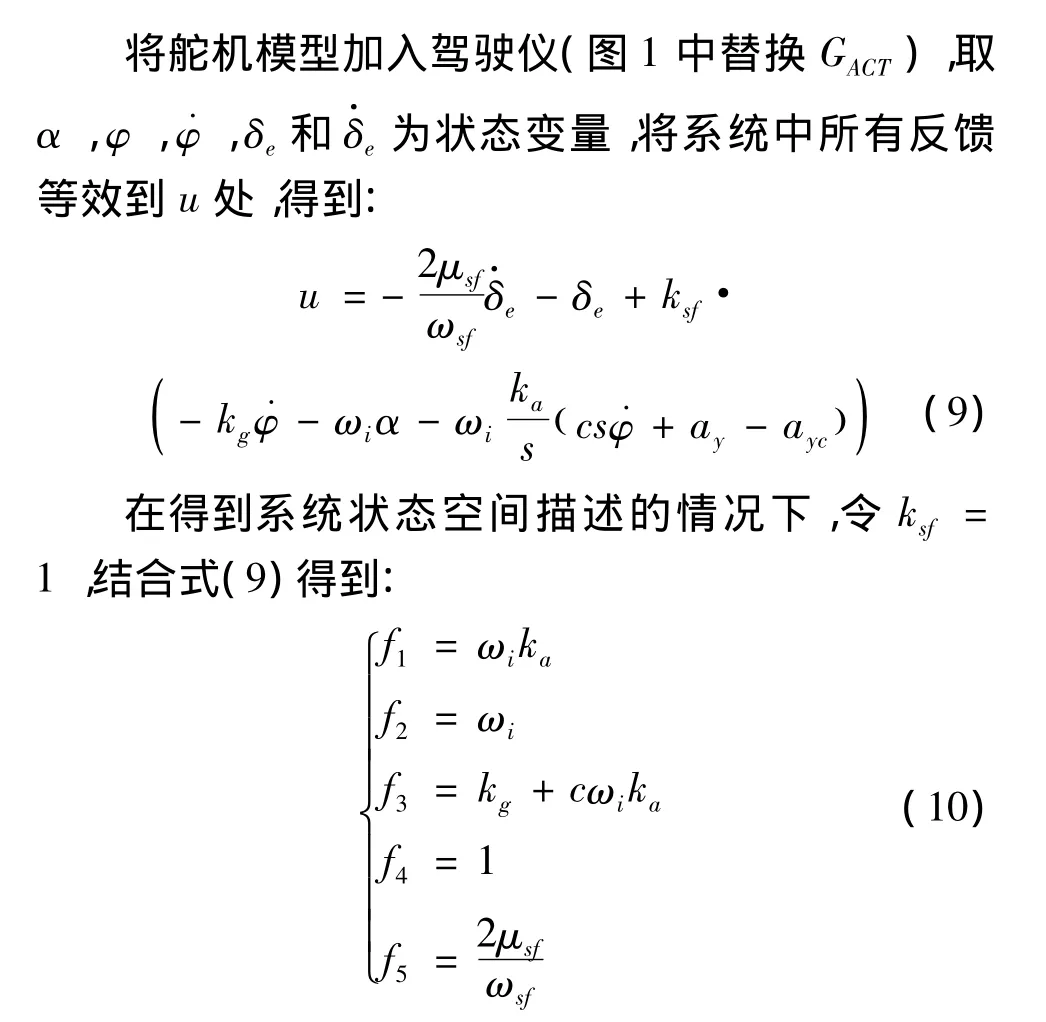
3 考虑伺服特性设计驾驶仪
上述设计中,没有考虑伺服机构的动态特性,因此得到的实际系统性能与设计指标存在一定的偏差。理论上,伺服机构的动力学越快,性能指标偏差越小,但伺服机构频带有限,特别是当舵机频率较低时,对驾驶仪极点有较大的影响。因此,需要在设计中考虑伺服特性,引入舵机状态反馈约束,将系统极点配置到设计指标期望的位置。
舵机的动态特性,一般用二阶模型描述,如式(8):
对于已选定的舵机,输出反馈矩阵F中仅有3个反馈系数与设计参数相关,f4和f5则根据舵机的特性参数直接确定,为2个确定值,从而限制了系统极点的取值,引入了额外的约束条件。因此设计中,使用“根平面搜索法”,即使用优化方法搜索根平面,找到一对共轭根,使得这对根与另外3个系统主根按照极点配置方法计算得到的反馈系数与由舵机特性计算得到的f4和f5一致。搜索到系统期望闭环极点后,按照上节的设计方法,进行开环穿越频率约束的驾驶仪设计。
4 实例分析
某导弹的弹体气动参数如表1所示。取驾驶仪设计指标为:τ=0.3s,μ=0.7,ωc=15rad/s;舵机参数为:μsf=0.7,ωsf=200rad/s。
不考虑驾驶仪伺服特性,按照式(3)描述系统,容易证明系统可控,可在根平面内对极点进行任意配置。令驾驶仪自振频率为ωn=[0.001:0.1:50]rad/s,结合性能指标τ和μ,搜索得到ωn=6.9229rad/s。此时系统开环穿越频率为ωc=15.0006rad/s,配置的系统极点为-3.33,-4.846±4.944i,最终设计结果见表2。
考虑舵机动态性能时,驾驶仪的状态空间方程描述为5阶形式,使用优化方法,进行“根平面搜索”,得到满足f4=1,f5=0.007的极点为:-3.33,-5.3688±5.4773i,-151.19±113.45i。同时搜索系统开环穿越频率,当自振频率ωn=7.6698rad/s时,ωc=14.9998rad/s,设计结果见表2,开环幅频特性曲线对比如图2所示。
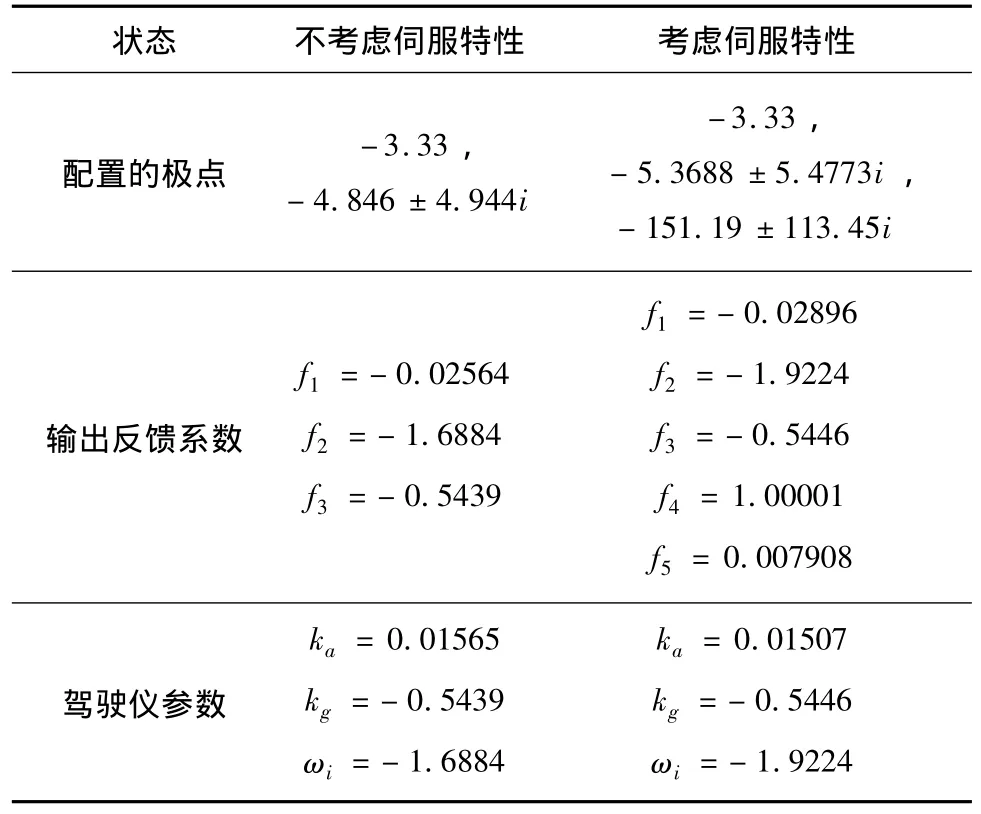
表2 设计结果表
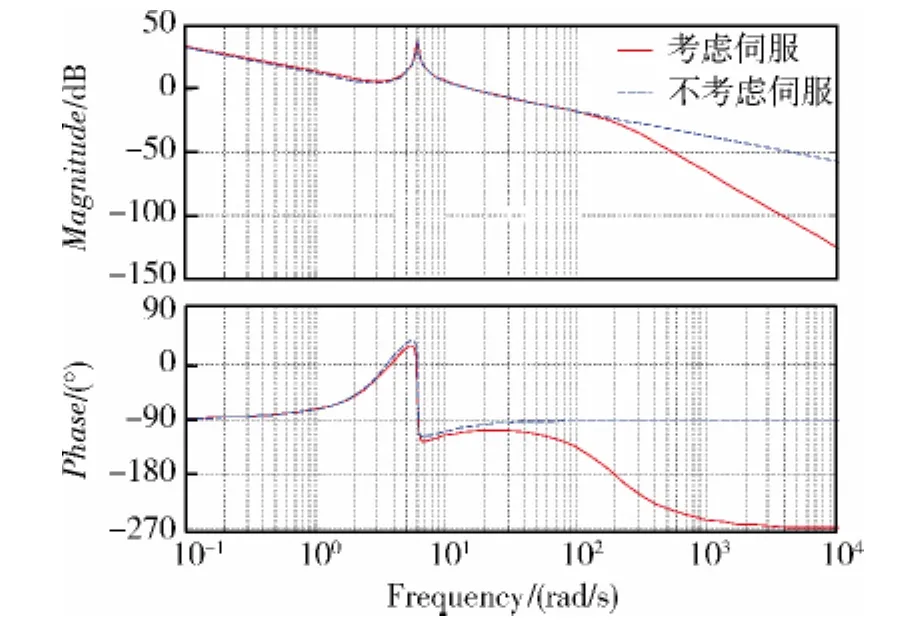
图2 开环幅频特性曲线
驾驶仪参考输入ayc为阶跃时的响应曲线如图3所示,输出过载信号ay产生一个较小的负向过载,作用给弹体后,角速度相应增加(如图4所示),并使弹体有一个较小的正攻角(如图5所示),从而由气动力产生正过载干扰,作用于过渡过程。过渡过程结束后,ay跟踪参考输入。
5 结论
将传统三回路驾驶仪结构中的角速度直接积分,用一个惯性环节代替,即为伪攻角反馈三回路驾驶仪,其采用输出反馈形式,可以在状态空间模型的基础上进行极点配置。为了对伪攻角反馈过载驾驶仪的开环穿越频率进行约束,本文使用连续搜索法进行闭环极点配置,同时,考虑到伺服特性对系统的影响,使用优化方法搜索根平面,在引入附加约束条件的基础上,配置系统极点满足设计要求。通过仿真验证,伪攻角反馈过载驾驶仪开环穿越频率约束的极点配置算法,能够满足工程要求,具有一定的应用前景。
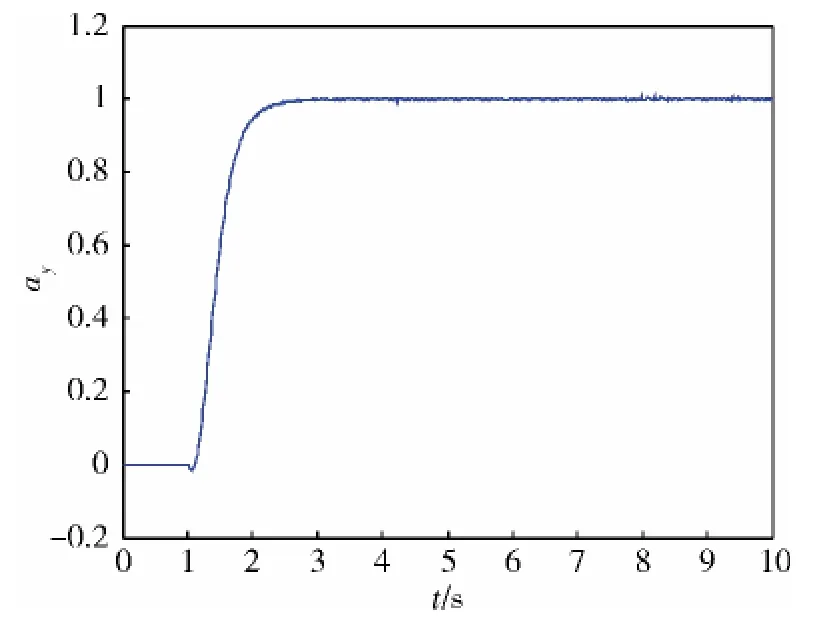
图3 驾驶仪阶跃响应曲线
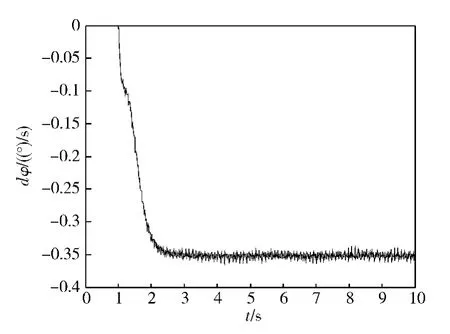
图4 角速度响应曲线
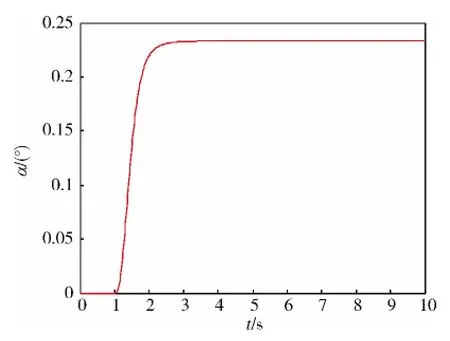
图5 攻角响应曲线
[1] Wise K A.A Trade Study on Missile Auto-pilot Design Using Optimal Control Theory[C]//Proc.of the AIAA Guidance,Navigation,and Control Conference and Exihibit,2005:698-727.
[2] Mracek C P,Ridgely D B.Optimal Control Solution for Dual(tail and canard)Controlled Missiles[C]//Proc.of the AIAA Guidance,Navigation,and Control Conference and Exihibit,2006:1-28.
[3] 朱敬举,祁载康,夏群力.三回路驾驶仪的极点配置方法设计[J].弹箭与制导学报,2007,27(4):8-12.(Zhu Jingju,Qi Zaikang,Xia Qunli.Pole Assignment Method for Three-loop Autopilot Design[J].Journal of Projectiles,Rockets,Missiles and Guidance,2007,27(4):8-12.)
[4] 温求遒,夏群力,祁载康.三回路驾驶仪穿越频率约束极点配置设计[J].系统工程与电子技术,2009,31(2):420-423.(Wen Qiuqiu,Xia Qunli,Qi Zaikang.Pole Placement Design with Open-loop Crossover Frequency Constraint for Three-loop Autopilot[J].Journal of Systems Engineering and Electronics,2009,31(2):420-423.)
[5] 王辉,林德福,祁载康.导弹伪攻角反馈三回路驾驶仪设计分析[J].系统工程与电子技术,2012,34(1):129-135.(Wang Hui,Lin Defu,Qi Zaikang.Design and Analysis of Missile Three-loop Autopilot with Pseudo-angle of Attack Feedback[J].Journal of Systems Engineering and Electronics,2012,34(1):129-135.)
[6] 林德福,王辉,王江,范军芳.战术导弹自动驾驶仪设计与制导律分析[M].北京:北京理工大学出版社,2012.(Lin Defu,Wang Hui,Wang Jiang,Fan Junfang.Autopilot Design and Guidance Law Analysis for Tactical Missiles[M].Beijing:Beijing Institute of Technology Press,2012.)
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24
中国特种设备安全(2021年5期)2021-11-06
中国惯性技术学报(2018年4期)2018-11-08
电子测试(2018年1期)2018-04-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
合成化学(2015年4期)2016-01-17
海军航空大学学报(2015年1期)2015-11-11
电子设计工程(2015年6期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
