基于波导不变性的水平阵列测距研究
2015-03-12 03:39徐国军笪良龙李玉阳
舰船科学技术 2015年10期
徐国军,笪良龙,李玉阳
(海军潜艇学院,山东 青岛266071)
0 引言
水下目标声源远距离测距一直是水声界科研工作者持续关注和研究的热点问题。经过近几十年的发展,已经形成了许多成熟的定位算法,如三子阵定位方法、纯方位目标运动分析算法、匹配场目标定位方法等,近年来,海洋环境的波导不变量理论研究得到了较大发展。
文献[1]就浅海环境的波导不变量理论进行了详细地分析和讨论,揭示了海洋波导中距离、频率之间特定的内在关系。文献[2]提出了一种新的、利用水声环境内在不变特性的测距方法——基于引导源的宽带声源目标定位算法。该算法根据水声环境的波导不变特性,利用垂直阵列和引导声源信号,通过RADON变换实现了远距离的宽带声源测距,算法不需要知道确切的海洋环境参数,仅利用了引导声源信息,相比匹配场定位有更好的宽容性。文献[3-4]利用不同的降噪处理算法,克服了文献[2]中算法不能实现低信噪比声源定位的问题。本文从另一方面考虑,采用水平阵列,对目标声源进行测距研究,分别利用引导声源信息和阵列长度信息,展开了目标测距研究,根据数值仿真结果证明了两测距算法具有较好的定位效果。
1 利用引导声源的水平阵测距
1.1 测距原理
文献[2]通过布满整个水层的垂直阵,利用已知的引导声源实现了目标声源的测距,取得了较好的定位效果。然而实际中,垂直阵的布设尤其要布满整个水层,极其困难。相对而言,对于水平阵的布设则容易很多,因而研究基于水平阵的目标声源定位更有实际意义。水平阵、引导声源和目标声源相对位置关系如图1所示。假设目标声源、引导声源都处于水平阵的端射方向,与水平阵中间阵元距离分别为ro和rg,当声源位于其它方向时,可利用水平阵的波束形成得到目标方位角后,进行距离修正,这里不展开论述。
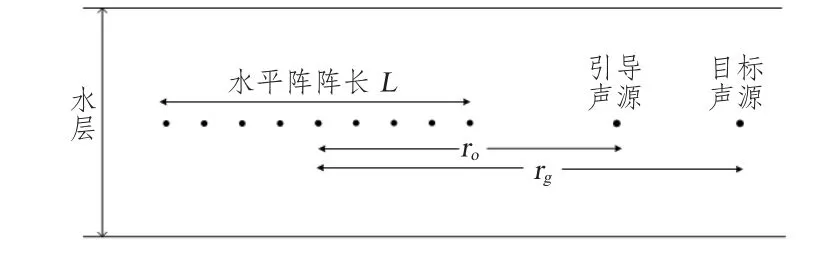
图1 水平阵、引导声源和目标声源位置关系Fig.1 Geometric relation between the horizontal array,guide source and target
由简正波理论,对于水平不变的分层海洋介质,距离远大于几倍水深条件下,深度为zs、距离r的点源在深度为zn处的接收点产生的辐射声压场可表示为:

则接收的声压谱可表示为:

利用微扰原理,有:

式(3)中的各偏导数为:
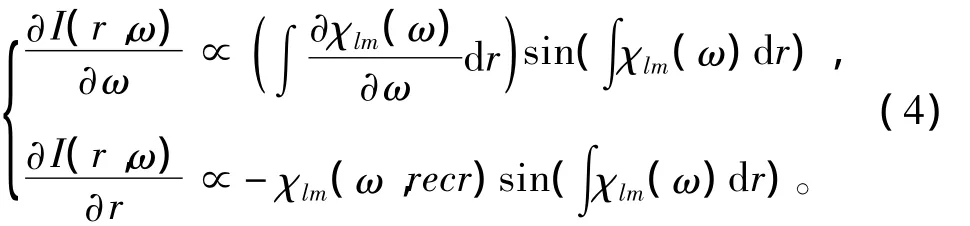
其中χlm(ω,recr)为接收位置处的第l阶和第m阶模态的波数差。
把这些偏导数代入式(4),经整理,可得如下关系式
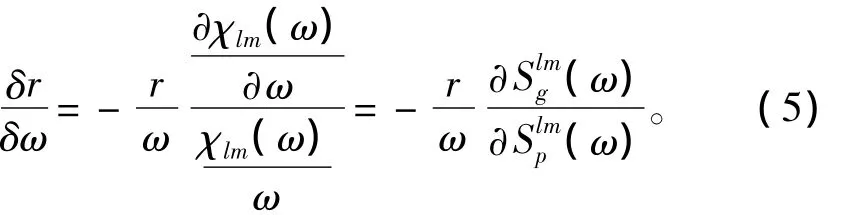
有波导不变量定义[1]为:

式中下标“contour”为声强在距离-频率谱平面图(文献[1]中的图3)中干涉亮线上频率变化量与距离变化量的比值,即干涉亮线的斜率。
根据引导声源和目标声源产生的声场干涉特征,利用波导不变量可表示为:

式中Fo和Fg分别为距离-频率平面图上(ro,ωo)和(rg,ωg)对应的条纹斜率。显然,对于求解目标声源的距离,波导不变量的具体数值不需知道,只用求得两声源在r-ω上条纹斜率。进一步化简有:

当选取目标声源和引导声源的频谱中心一致时,有:

1.2 测距数值仿真
海洋环境选择典型的浅海负跃层,声源在水平阵的端射方向上由10 km,逐渐运动到4 km,每运动1 km发射一段宽带信号,信号中心频率110 Hz,带宽20 Hz。水平阵由21个全向阵列等简距5 m连接而成,水平阵长为100 m,水平阵和声源都设定在温跃层之下。数值验证时,选择10 km时刻声源信号为引导声源,7 km,6 km,5 km和4 km时刻声源信号为目标声源,逐一进行条纹提取,从而估计其距离。仿真过程中,r-ω上的条纹斜率由Radon变换提取。
图2各子图分别为仿真时的声速剖面及声源在10 km,7 km,6 km,5 km和4 km时,由水平阵列各阵元接收信号处理得到的时频图。仿真过程中,选取声源和水平阵深度为20 m。由不同距离时频图计算的条纹斜率F分别为0.543 0,0.772 9,0.913 1,1.091 3和1.422 9。
当选取10 km时信号为引导声源,7 km,6 km,5 km和4 km分别为目标声源时,由式(9)得到的各距离值分别为7.03 km,5.93 km,4.98 km和3.82 km,估计误差分别为0.36%,0.9%,0.5%和4.6%。由仿真结果不难发现,基于引导源的水平阵列定位方法能够准确地实现目标声源的定位,误差较小。
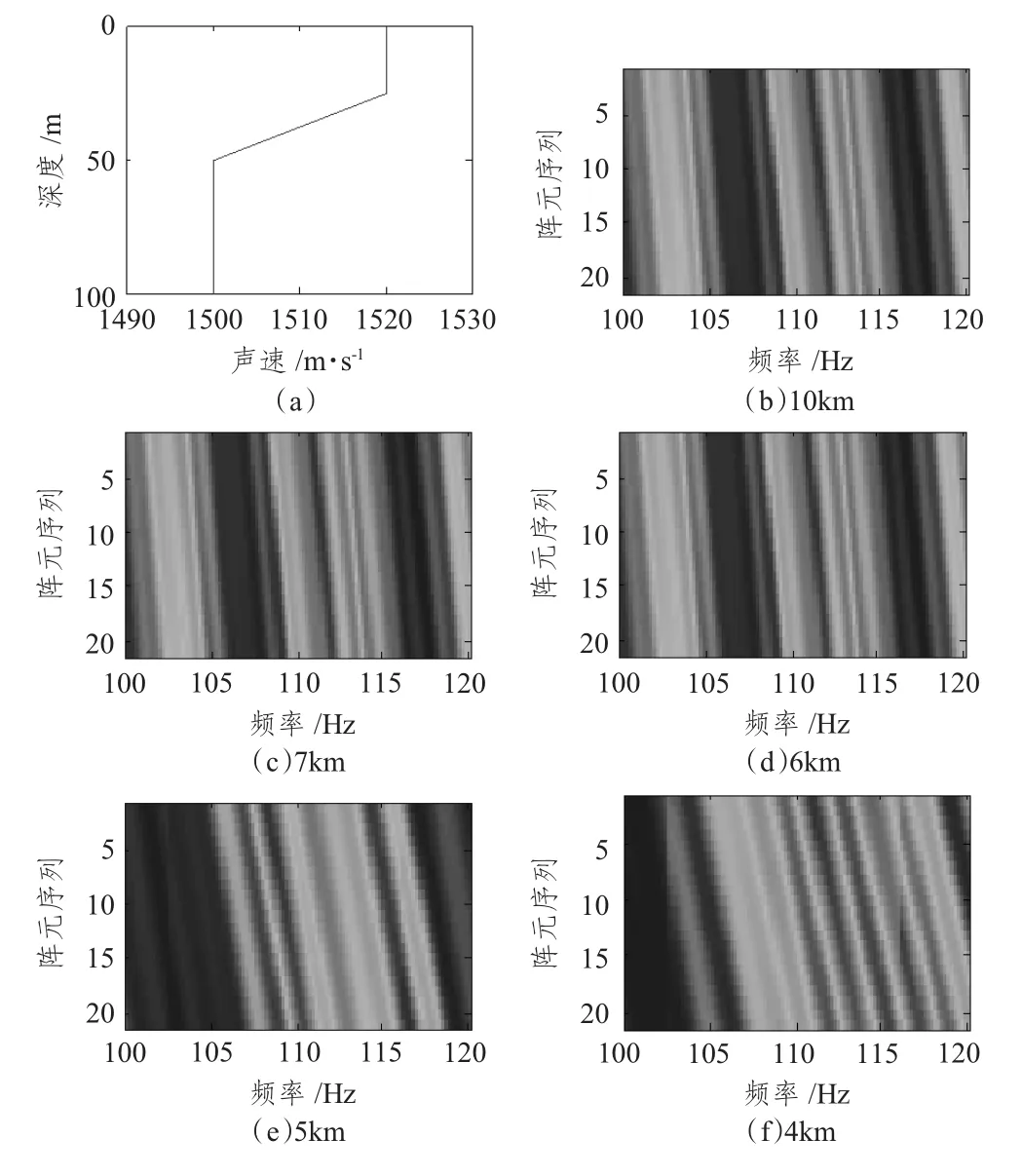
图2 声速剖面及不同距离声源信号处理时频图Fig.2 The selected sound speed profiles and the frequency-element(range)results
2 基于阵列信息的水平阵定位研究
前文重点研究了水平阵条件下,基于引导声源对目标宽带声源进行测距,实现了其数值仿真,取得比较满意的效果。然而实际中,引导声源声场的实时获取比较困难,针对这一情况,文中提出仅利用目标声源声场,结合水平阵列的长度信息,实现目标声源的距离估计。对于大部分浅海环境,可认为波导不变量β≈1[5]。由式(6)可得:
声强r-ω的干涉条纹示意图如图3所示,选取图中条纹2进行分析,BC为距离Δr,间距可由实际条纹图及水平阵长计算得到,DC为目标声源声场在r-ω平面的干涉条纹段,BD为频率差Δω-BC根据条纹2对应的频率宽度 (图中ω1<ω2)。显然,对于实际的距离-频率干涉条纹图,ω0,Δr,Δω的值较容易得到。
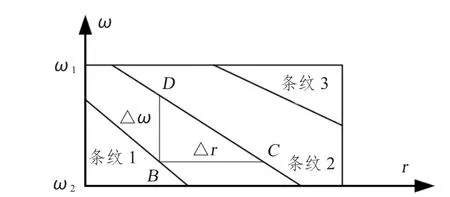
图3 声强在r-ω平面图上干涉条纹Fig.3 Schematic of the frequency-range
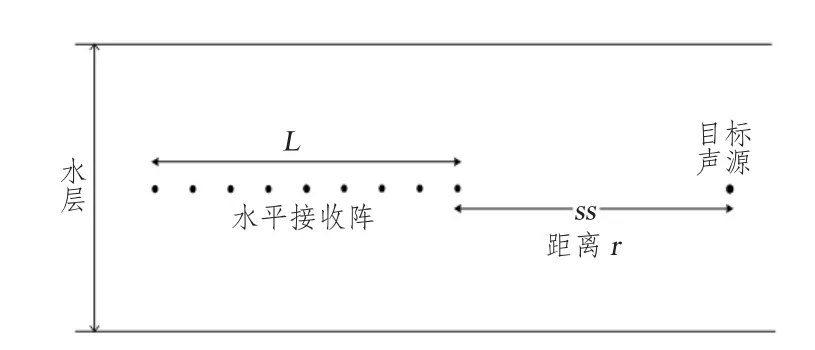
图4 声源阵列位置关系图Fig.4 Geometric relation about the horizontal array and the source
仿真时阵列与海洋环境位置关系如图4所示,目标声源与水平阵中间阵元距离为r,水平阵长为L。利用图2中的海洋环境以及水平阵处理得到的时频图,根据式(10)计算的各声源距离估计值分别为10.2 km,6.46 km,6.24 km,4.95 km和3.89 km,估计误差分别为 2.0%,7.7%,4.0%,0.98%和2.84%。
下面分别展开在典型的正梯度海洋环境、负梯度海洋环境和均匀层海洋环境中,利用上面提出算法基于水平阵列信号进行定位研究。3种声速剖面如图5所示,估计各声源位置距离结果如表1所示。
由以上仿真结果不难发现,基于水平阵列信息的定位方法能够较好地实现目标声源估距,且估计误差较小。
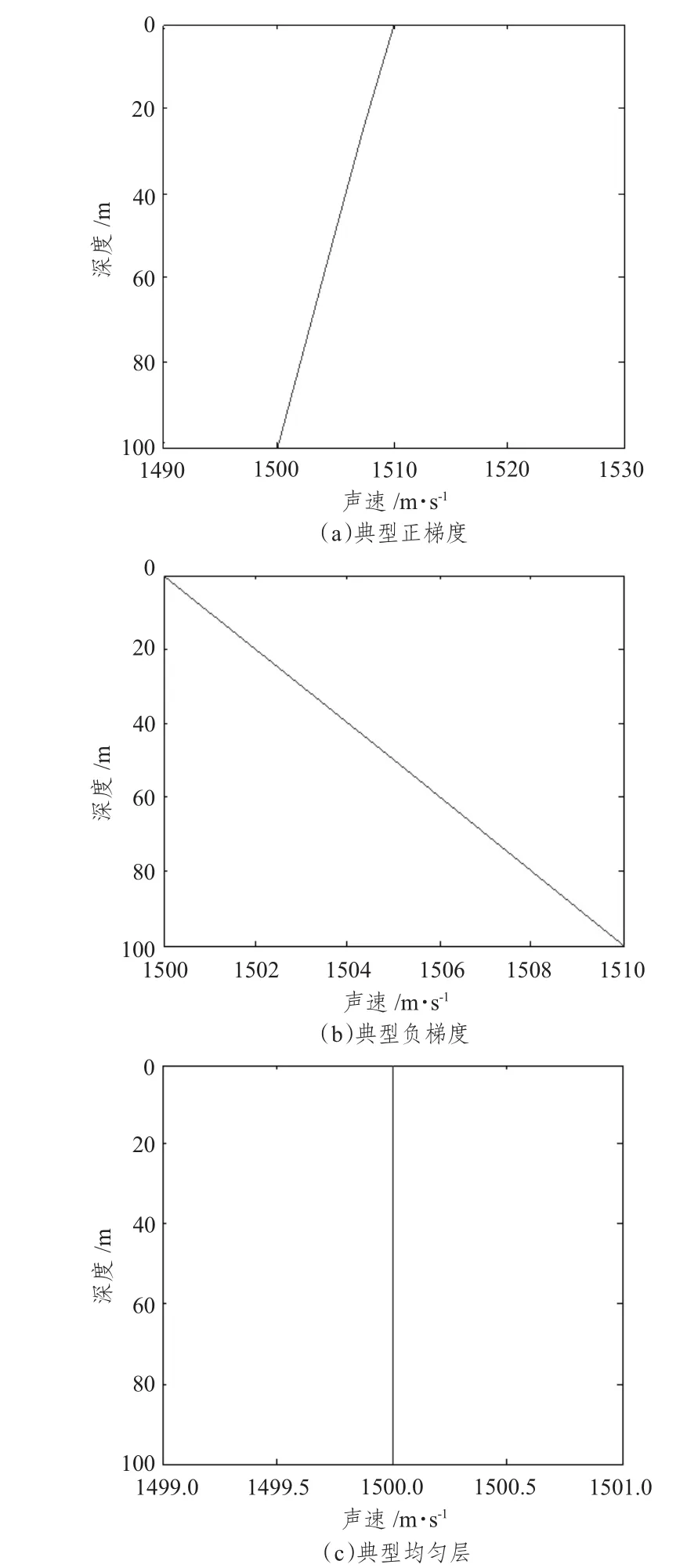
图5 三种典型海洋环境声速剖面Fig.5 Three different shallow water environments
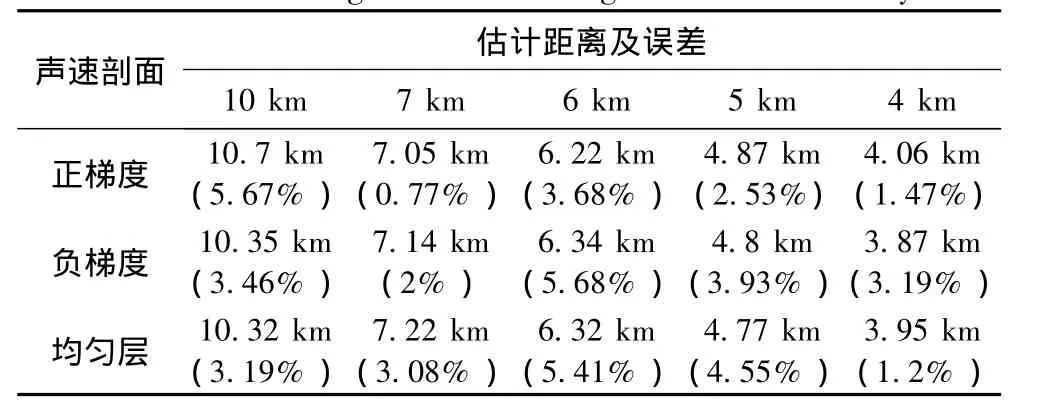
表1 三种典型海洋环境下水平阵列处理结果Tab.1 The range estimates using the horizontal array
3 结语
本文以海洋环境的内在不变性即波导不变性为基础,首先根据水平阵列接收的两信号-引导声源信号和目标声源信号,利用引导声源的距离信息,以及两声场产生的干涉结果,对目标声源距离进行了测定。其次假定浅海声场波导不变量为1条件下,根据声场强度在距离-频率平面里的干涉条纹特性,在无引导声源情况下,仅利用了阵列的长度信息,对目标声源距离进行了估计。通过数值仿真,2种测距算法都取得了比较好的定位结果,测距误差小于8%,表明了2种算法的有效性,同时2种算法对具体的环境参数信息要求较少,具有很好的鲁棒性。下一步作者将如何利用单元阵对远距离目标测距展开研究,使波导不变性理论的应用更加适合于实际。
[1] SPAIN GL D,KUPERMAN WA.Application of waveguide invariants to analysis of spectrograms from shallow water environments that vary in range and azimuth[J].J.Acoust.Soc.Am,1999,106(5):2454 -2468.
[2] AARON T M.Source ranging with minimal environmental information using a virtual receiver and waveguide invariant theory[J].J.Acoust.Soc.Am,2000,108(4):1582-1594.
[3] 徐国军,笪良龙,李玉阳,等.低信噪比条件下引导源目标定位算法[J].声学技术,2010,29(3):336 -339.
[4] 徐国军,笪良龙,李玉阳,等.基于Gabor滤波的引导源目标定位研究[J].数据采集与处理,2011,26(1):31 -35.
[5] QUIJANO JE,ZURK L M.Demonstration of the invariance principle for active sonar[J].J.Acoust.Soc.Am,2008,123(3):1329-1337.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年11期)2022-07-15
科学(2020年3期)2020-01-06
电子制作(2019年23期)2019-02-23
电子制作(2017年7期)2017-06-05
电子制作(2016年19期)2016-08-24
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
太空探索(2014年1期)2014-07-10
中国新技术新产品(2012年10期)2012-03-12