水电机组飞轮力矩的在线检测方法*
2015-03-13 02:30耿在明潘罗平
振动、测试与诊断 2015年5期
张 飞, 耿在明, 付 婧, 潘罗平
(1.中国水利水电科学研究院水力机电研究所 北京,100038) (2.溪洛渡水力发电厂机械水工维修部 永善,657301) (3.中国水利水电科学研究院综合事业部 北京,100038)
水电机组飞轮力矩的在线检测方法*
张 飞1, 耿在明2, 付 婧3, 潘罗平1
(1.中国水利水电科学研究院水力机电研究所 北京,100038) (2.溪洛渡水力发电厂机械水工维修部 永善,657301) (3.中国水利水电科学研究院综合事业部 北京,100038)
为实现水电机组飞轮力矩的在线检测,推导了飞轮力矩的计算公式,对水电机组甩负荷过程中转速变化情况进行了研究,提出了利用机组甩负荷的转速数据监测飞轮力矩的方法。该方法将转速信号来源分成监控系统的模拟转速信号和调速器系统的齿盘测速信号。针对模拟转速信号,首先,采用小波变换滤波对转速数据进行滤波处理;然后,在指定相关系数水平上,采用自适应时长计算转速与时间的相关系数确定转速线性上升段,对齿盘获得的转速信号采用定时长方法计算转速与时间的最大相关系数确定转速线性上升段;最后,根据标准GB/T1029—2005规定的发电机甩负荷加速试验方法计算飞轮力矩,采用实测数据对该方法的有效性进行了验证。
水电机组; 飞轮力矩; 在线检测; 小波变换; 相关系数
引 言
水电机组转动部件的飞轮力矩对机组过渡过程分析产生重要的影响[1-4]。长期以来,在过渡过程计算及电网分析中采用设计值作为计算依据,而设计值与实际值两者之间存在一定程度上的偏差,这使得计算结果产生某种程度上的误差[5-7]。另外,随着机组长时间的运行,整个转动部件的旋转中心也会发生不可预估的变化,常采用监测机组各个导轴承部位的轴摆度或者轴心轨迹[8-9]实现,或者在安装及大修后通过试验测定机组的飞轮力矩[10-11]。目前,大多数机组已安装在线监测设备,实现了机组运行状态的实时监测。这些监测系统能够将机组过渡过程中的数据(振动、摆度、压力脉动、转速及其他相关工况数据)以高分辨率的形式存储起来,供运行维护人员查阅,同时以离线分析的形式确定机组有无异常。
基于上述分析,根据在线监测提供的机组甩负荷试验时的转速与有功功率数据,笔者建立了水电机组飞轮力矩的检测方法并通过实例进行了验证。这一方法能够解决大型机组的转动惯量的测量及检测问题。考虑到转速信号两个不同的信号来源,一类来自监控系统的模拟信号,一类来自调速器齿盘信号。对这两种不同信号分别进行了不同手段的处理。首先,由于模拟转速信号夹杂噪声,采用小波分析方法对转速数据进行滤波,对齿盘或键向信号则采用常规手段计算转速,不做其他处理;然后,采用两种不同方法计算转速信号与时间的相关系数以确定有效的转速数据;最后,采用国标指定的方法计算整个旋转部件的飞轮力矩。实例证明,该方法可以有效检测机组的飞轮力矩,将该手段置于状态监测分析系统中可以有效丰富机组的状态监测手段,为机组的其他分析提供可靠素材。
1 信号滤波与相关系数
信号在获取过程中不可避免掺杂噪声信号,通常含噪的一维信号s(i)模型[12]可以表示为
s(i)=f(i)+σe(i)
(1)
其中:σ为常数;e(i)为噪声信号。
在实际工程中,有用信号一般表现为低频信号,噪声信号表现为高频信号。小波分析可以将信号做多层分解,对分解得到的高频系数选择一个阈值进行量化处理,然后再将小波分解到低频系数和各高频系数进行一维小波重构,从而得到消除噪声后的数据。
相关系数是用于反映变量之间相关关系密切程度的统计指标。对于两组数据{x1,x2,…,xn},{y1,y2,…,yn},其相关系数[13]按下式进行计算
(2)

2 飞轮力矩识别方法
根据GB/T 1029-2005《三相同步电机试验方法》[14],对于大型电机飞轮力矩采用发电机甩负荷加速试验方法进行。在机组甩负荷后,存在以下关系
(3)
其中:J为旋转部件转动惯量;α为角加速度;w为角速度;MT为机械力矩;ME为电磁力矩。
(4)
(5)
其中:PT为机械功率;PE为电磁功率。
公式中单位均为国际单位。
甩负荷后,机组电磁功率为零,由于调速器调节的滞后性,机械功率不能立即减小到零,从而使得机组转速升高。考虑到在甩负荷前,机组转速维持恒定,机械功率等于电磁功率。因此可以根据甩负荷前机组所带负荷确定机组的加速力矩。
通常在设计时不是给出机组的转动惯量,而是给出飞轮力矩,飞轮力矩与转动惯量的关系为
(6)
根据式(3)~(6)联合求解,可以确定机组的转动惯量计算公式为
(7)
假定机组轴承摩擦损耗及风损为常数,则机组的加速力矩保持为常数,机组角加速度为常数,角速度线性增大。考虑机组甩前转速恒定,在计算飞轮力矩时,式(7)可修改为
(8)
其中:wN为额定角速度。
该方法主要适用于飞轮力矩较大以及采用其他方法测定有困难的电机。试验时,被测电机在发电机工况下运行,当电机突然从电网解列后,测定机组转速随时间变化的曲线。采用这一方法确定飞轮力矩时,理论上应保持转子励磁稳定。在实际运行中,当机组甩负荷后励磁系统迅速动作进行灭磁。因此在在计算功率时应加上定子铁芯损耗。由于机端电压基本保持稳定,因此不同工况下,定子铁芯损耗保持恒定[15],在计算甩前负荷时应加上恒定的铁芯损耗。
3 实例分析
机组转速数据通常有两个来源,一是监控系统采集来的模拟量,另一个是采用齿盘或者键向信号直接计算得出的转速。信号来源不同,则转速的处理方法不同。当来自于监控系统的模拟信号时,由于模拟量的采集不可避免受到噪声的干扰,此时有必要对信号采取消除噪声的措施,以减小计算误差;而通过齿盘获得的转速信号则表现出截然不同的信号特征。
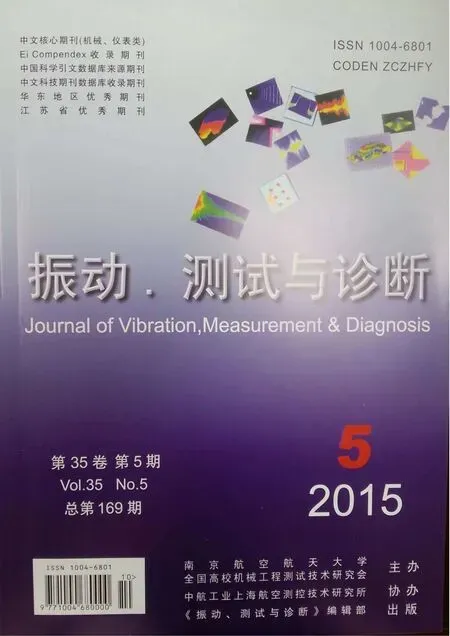
某机组水轮机为GZC19-WP-315,发电机为SFWG617-36/3800,额定铁芯损耗31.41 kW,发电机与水轮机飞轮力矩分别为143 tm2和30 tm2,机组额定转速166.7 r/min,整个转轮室内水体的飞轮力矩为10 tm2,因此机组的设计飞轮力矩为183 tm2。整个机组旋转部件组装后如图1所示。
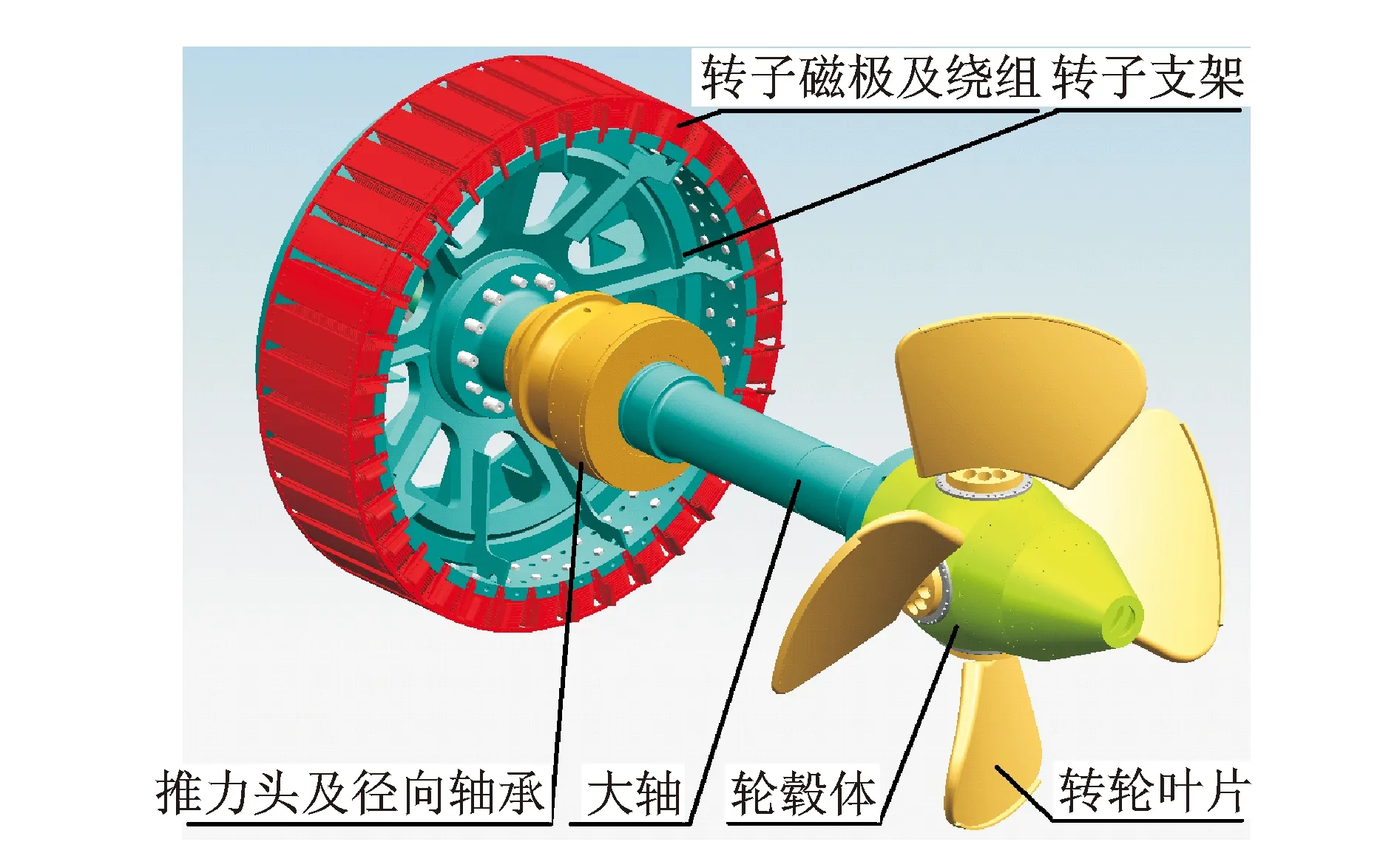
图1 某机组旋转部件图Fig.1 Rotating parts of a case unit
某次甩1 273 kW(甩前10 s功率平均值)时机组转速波形模拟量见图2所示。同时机组有一路从齿盘测得的转速信号,见图3所示。图中机组转速采样率为1 000 Hz。机组甩负荷后最大转速为201.42 r/min。
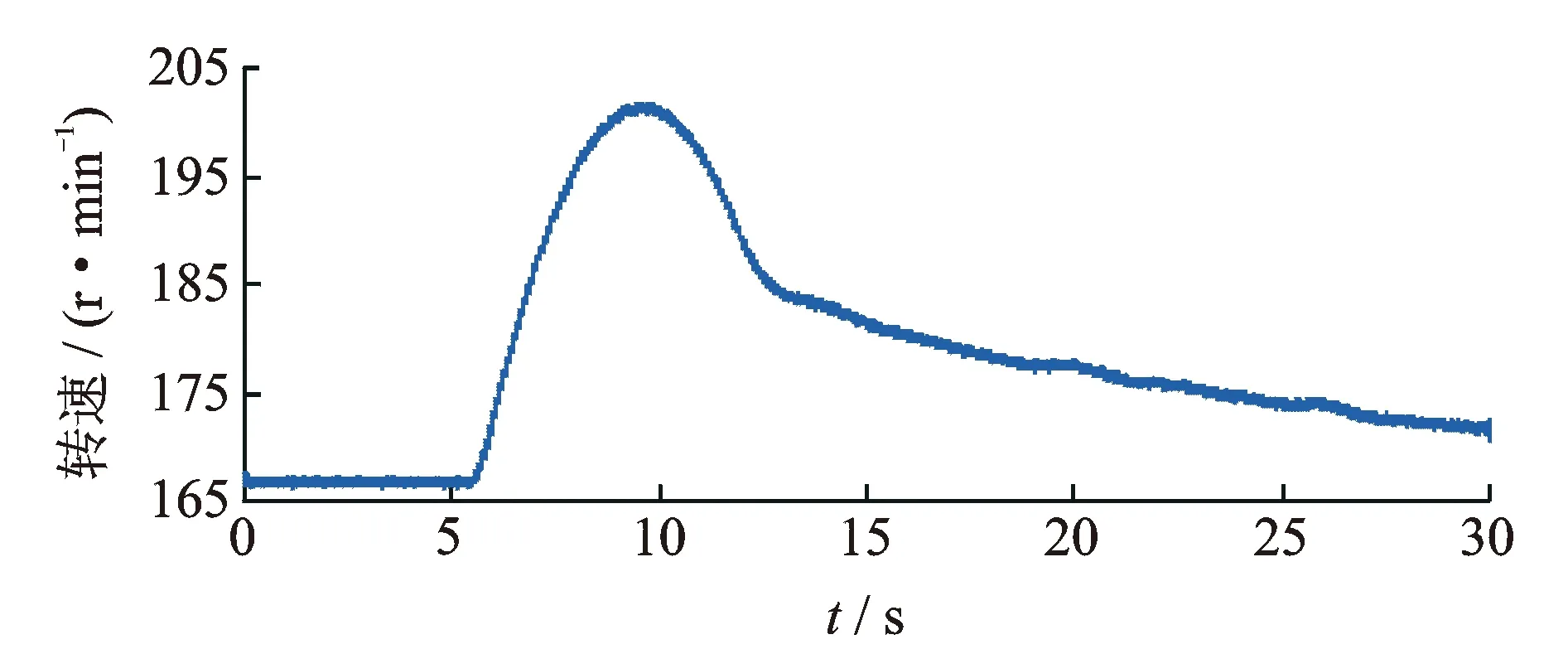
图2 甩负荷过程中机组转速变化趋势(信号来源:转速模拟信号)Fig.2 Speed trend during load rejection (Analog speed signal from monitoring control system)
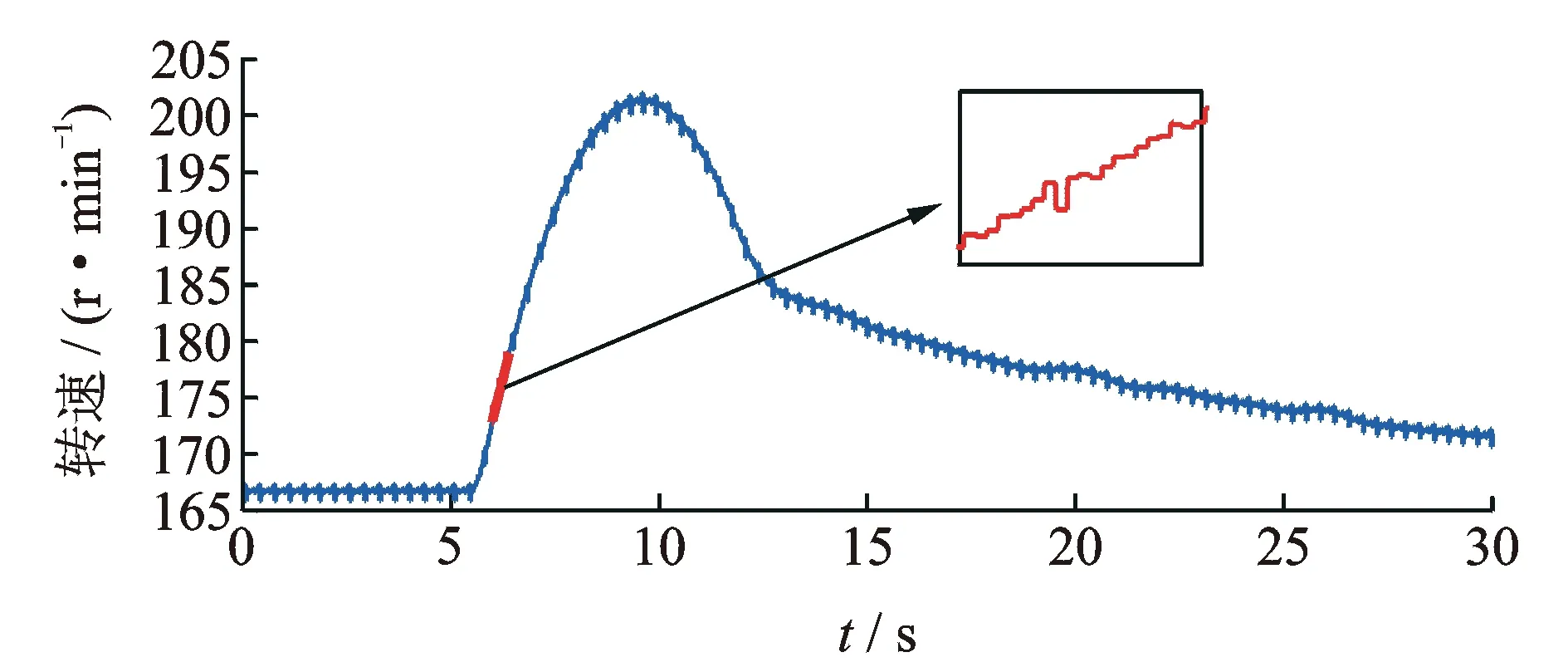
图3 甩负荷过程中机组转速变化趋势(信号来源:调速器齿盘测速信号)Fig.3 Speed trend during load rejection (Speed signal from toothed disc of speed governor)
由图2和图3可见,两路信号基本相似,但在图2中模拟信号中由于夹杂了一定量噪声信号,有必要对其进行滤波处理。在图3中,由于齿盘在制造和安装过程中不可避免存在间距不均匀的问题,因此计算转速时亦存在转速不均匀现象。将任意段波形放大后(图3中红色曲线部分),可见转速信号呈不规则阶梯状变化。
对于来自监控系统的模拟转速信号由于存在噪声干扰,首先采用小波分析进行滤波。小波基选用“Db4”,分解层数为3层,滤波阈值策略为启发式基于Stein无偏似然估计的阈值估计。滤波后的信号见图4所示。由图可见,滤波后的信号明显光顺,噪声信号得到有效抑制。经计算滤波后的信号能量占原有信号能量的97.46%。
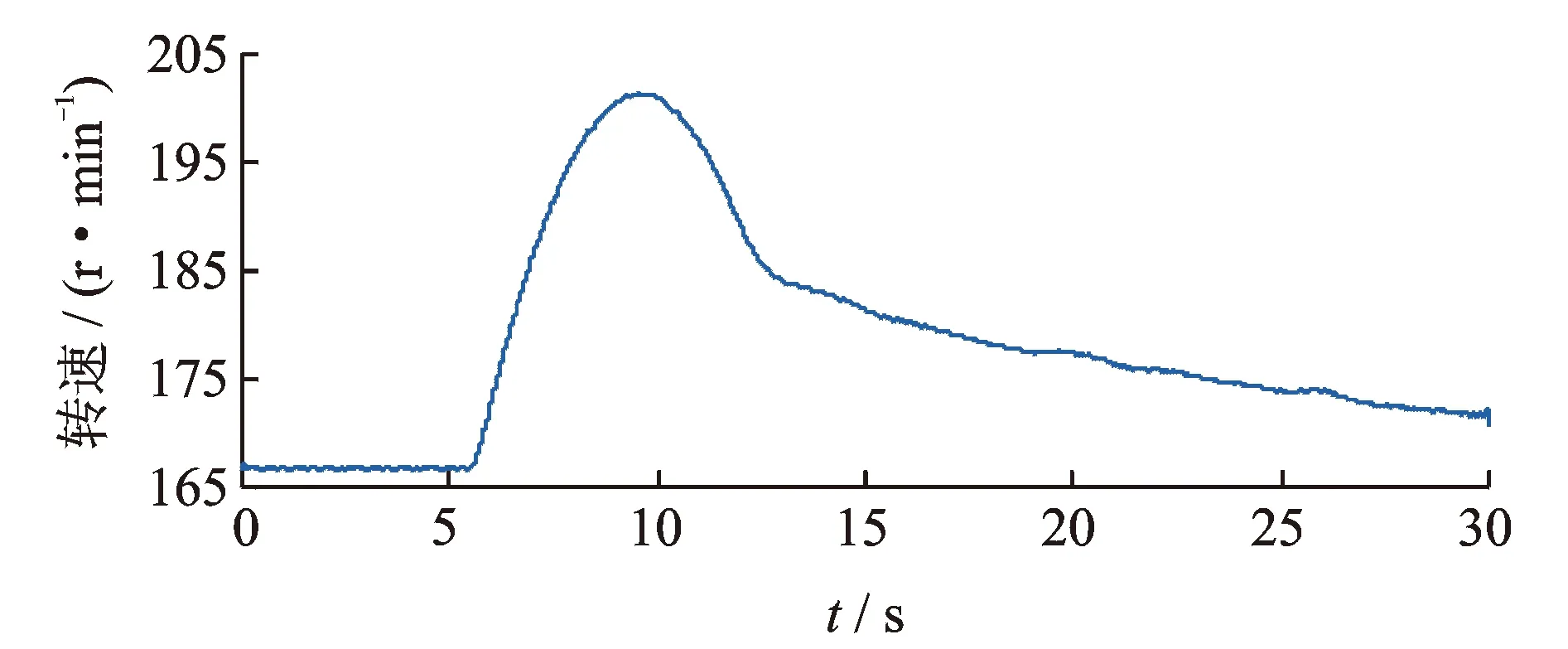
图4 滤波后的甩负荷转速变化趋势Fig.4 Filtered speed trend of load rejection
机组在甩负荷后,由于调速器机械死区以及调速器调节的滞后性,调速器并不立刻动作,因此在恒定力矩作用下,机组转速存在线性上升段。图4 中转速上升段信号取机组甩负荷时刻为起始时刻,结束时刻取机组最大转速时刻,图示坐标相对应的时间范围为5.510~9.510 s。
对模拟转速信号,为了充分利用甩负荷过程中转速数据,采用指定相关系数的方式,寻求在该相关系数条件下最长的连续转速数据。若给定的相关系数为C,该方法采用如下算法实现。
1) 截取转速上升过程曲线,设截取的上升过程曲线为X={x1,x2,…,xi,…,xN}。
2) 生成时间序列T={t1,t2,…,ti,…,tN-1}。
3) 计算X1={x1,x2,…,xi,…,xN-1}与时间序列T的最小二乘线性拟合,并计算残差为σ1;计算X2={x2,x3,…,xi,…xN}与时间序列T的最小二乘线性拟合,并计算残差为σ2。
4) 比较σ1和σ2的大小,若σ1<σ2,则令X=X1;否则X=X2;计算X与T的相关系数,如果相关系数小于给定值C,则令N=N-1重复步骤1)~4),若相关系数大于等于给定值则计算结束,该段数据即为给定相关系数下的连续转速数据。
由于滤波后的转速数据,波形较为光滑,当相关系数为0.998 9时,采用上述方法,提取出的连续转速数据如图5所示,时间范围为5.606~6.791 s。采用最小二乘拟合计算出该段数据的斜率,即角加速度为14.51 (r·min-1)/s2。采用式(7)计算机组的转动惯量为196.65 tm2,与设计值偏差为+7.46%。满足误差小于±10%的要求[16]。
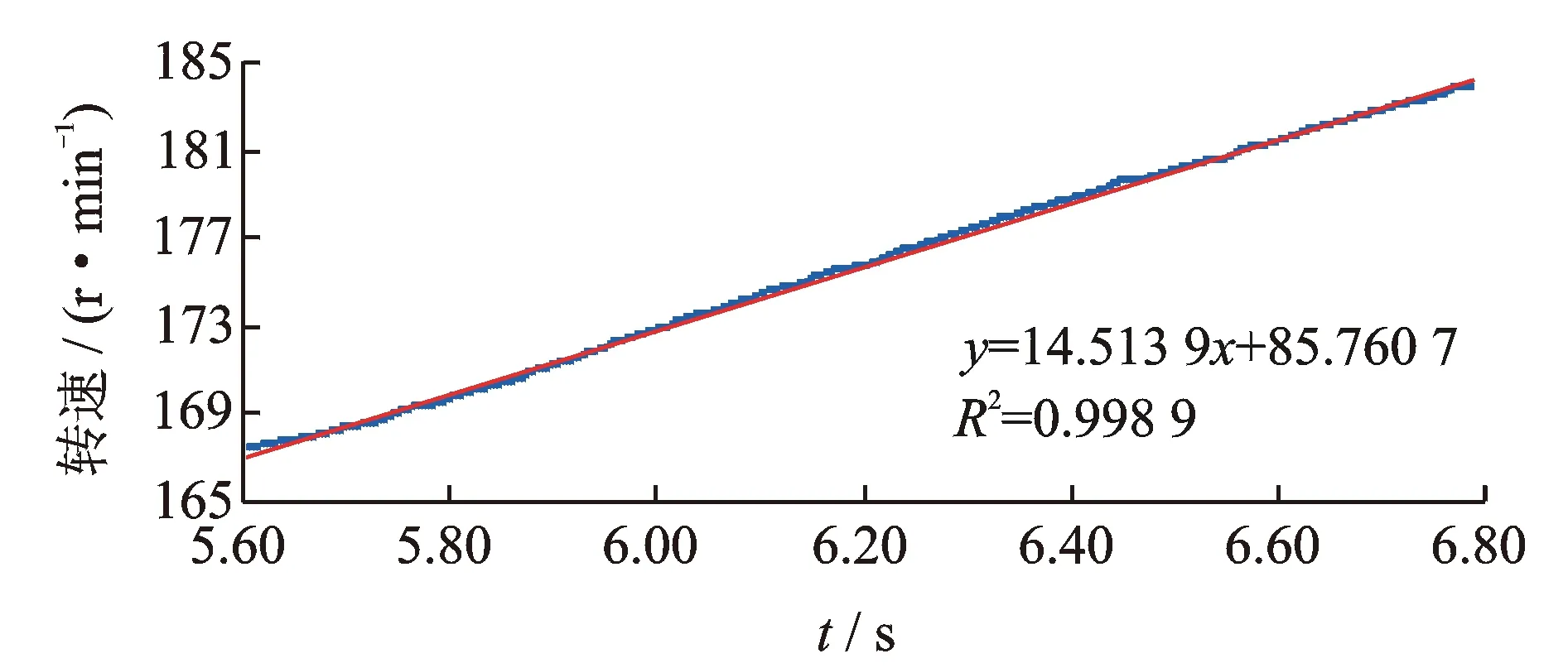
图5 提取出的转速线性上升段Fig.5 Extracted linear part of speed rise trend
对于通过齿盘测得的转速信号(有些系统采用键向信号测量机组转速,对于采用键向信号获得的转速,由于每周只有一个脉冲,有效数据点数过少,这将导致严重的角加速度计算误差,因此不推荐采用),如果采用和模拟转速信号同样的处理手段,此时由于存在“阶梯现象”,有效转速数值量少,可能给计算造成困难。现采用如下方式进行:
1) 采用定窗口时长,时间长度为0.405 s,生成时间序列数组{0.001,0.002,…,0.405}。
2) 将转速数据与时间序列进行逐点相关分析,即:逐点计算相关系数,获取相关系数的趋势;当计算到最高转速时,计算过程结束。
3) 选择最大的相关系数,以最大相关系数对应的转速数据作为甩负荷时的可利用转速数据,计算飞轮力矩。
取5~10 s数据,根据以上步骤计算得出定时长0.405 s与转速的相关系数趋势见图6所示。最大相关系数为0.988 0,有效线性化数据为0.740~1.144 s,对应时间范围为5.740~6.144 s。采用该段数据,根据式(7)计算得到该机组的飞轮力矩为188.83 tm2,与设计值的偏差为+3.19%,满足规范要求[16]。
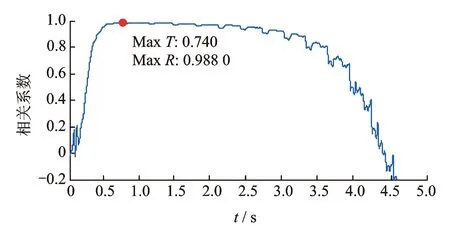
图6 定时长相关系数趋势Fig.6 Correlation coefficient trend with defined time period
在定窗口时长计算有效数据时,通过逐点滑动方法计算时间序列与转速数据的相关系数,求最大相关系数得到可利用的有效转速数据。在实际应用中应当注意,所采用的时间窗口长度应能够满足计算的需要。如果窗口过长,有可能导致计算得到的相关系数较小,此时表明所采用的数据段非线性,则增大了角加速度计算误差,从而导致结果偏差较大。如果选用的时间窗口太短(极限情况,选择两个点进行计算,则相关系数恒等于1),一方面计算的相关系数都非常大,给计算选取带来了一定的难度;另一方面时间太短,齿盘所转过的齿数太少,由于齿盘的加工误差,可能导致转速计算误差增大。选择定窗口时长计算给飞轮力矩计算带来的一个明显的好处是计算简便,所需耗费的计算量较小,便于计算。
在定窗口时长计算时,一种可以推荐的方法是设定计算周期为接力器不动时间。图7给出了甩负荷后接力器行程关系与转速变化关系曲线,从图中可以得到本例的接力器不动时间约为0.405 s。在图6中当采用0.405 s的时长计算相关系数时可见,在0.594~1.826 s区间范围内,对应时间为5.594~6.826 s,相关系数均大于0.98,如果采用整个区间进行计算,则转动惯量为197.02 tm2,误差为+7.66%,这一区间为3.04倍的接力器不动时间。对其他电站齿盘测速进行分析时表明,选择2~3倍的接力器不动时间计算转动惯量能满足计算误差小于±10%的要求,能够满足计算需要。这一规律在其他电站的飞轮力矩计算中也得到了验证。
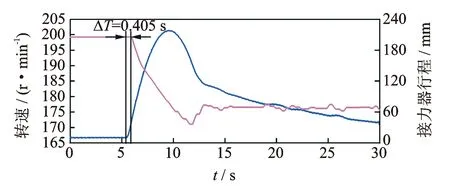
图7 甩负荷后转速与接力器行程随时间变化曲线Fig.7 Servomotor stroke and speed trend of load rejection
4 结束语
笔者推导了飞轮力矩的计算公式,对甩负荷过程中的转速数据进行了研究,根据不同的转速数据来源建立了两种处理方法:自适应指定相关系数法(非定时长)和定时长最大相关系数法提取飞轮力矩计算时的有效转速数据,依据GB/T1029-2005标准中规定的方法,建立了飞轮力矩进行计算的方法。研究表明,该方法可以对飞轮力矩的检测进行自动计算,且计算结果满足国际、国内相关标准要求。这一手段可以丰富机组状态监测和故障诊断的方法,同时采用飞轮力矩的实测值也可以减小仿真计算时采用设计值的误差。
[1] 杨建东,高志芹.机组转动惯量GD2的取值及对水电站过渡过程的影响[J].水电能源科学,2005,23(2):47-49.
Yang Jiandong, Gao Zhiqing. Fly wheel effect research on transient process of hydropower station[J]. Water Resources and Power,2005,23(2):47-49. (in Chinese)
[2] 李雪淋,欧传奇,毛建平,等.机组转动惯量的合理取值计算分析[J].人民长江,2007,38(11):51-52.
Li Xuelin, Ou Chuanqi, Mao Jianping, et al. Calculation and analysis on unit inertia determination[J]. Yangtze River,2007,38(11):51-52. (in Chinese)
[3] 田丰,余天龙.大型机组甩负荷试验若干问题探讨[J].中国电力,2000,33(7):84-88.
Tian Feng, Yu Tianlong. Discussion on the problems in load rejection test of large size generating unit[J]. Electric Power,2000,33(7):84-88. (in Chinese)
[4] 冯伟忠.汽轮发电机组转子转动惯量测取探讨[J].动力工程,1998,26(5):11-15.
Feng Weizhong. Study of turning inertia measurement of rotor for steam generator set[J]. Power Engineering,1998,26(5):11-15. (in Chinese)
[5] 张安明,柴建云,王善铭,等.电力系统动态模拟中发电机组转动惯量的补偿[J].清华大学学报:自然科学版,2006,46(10):1661-1664.
Zhang Anming, Chai Jianyun, Wang Shanming, et al . Inertial compensation methods for generator sets in dynamic power system simulations[J]. Journal of Tsinghua University: Science and Technology, 2006,46(10):1661-1664. (in Chinese)
[6] 郑超,尚慧玉,次单玉珍,等.转动惯量对西藏林芝电网外送能力影响机制分析[J].电网技术,2012,36(12) :119-124.
Zheng Chao, Shang Huiyu, Ciren Yuzhen, et al. Analysis on influence mechanism of rotational inertia level of generators at sending end on outward power transmission capability for Linzi power network connected with Tibet power grid[J].Power System Technology,2012,36(12):119-124. (in Chinese)
[7] 彭丹霖,杨建明.浅析清江水布垭水电站水轮发电机组飞轮力矩GD2的选取[J].大电机技术,2002,28(5):16-19.
Peng Danlin, Yang Jianming. Study on choice of flywheel moment GD2of hydro-generator units in Qingjiang Shuibuya water power plant[J].Large Electric Machine and Hydraulic Turbine,2002,28(5):16-19. (in Chinese)
[8] 国际标准化组织.ISO7919.5—2005 旋转机械转轴径向振动的测量和评定,第5部分:水力发电厂和泵站机组[S] .瑞士:国际标准化组织,2005.
[9] 中华人民共和国国家质量监督检验检疫总局.GB/T11348.5—2002 旋转机械转轴径向振动的测量和评定,第5部分:水力发电厂和泵站机组[S].北京:中国标准出版社,2002.
[10]苟志德,富力新,李广德,等.抽水蓄能机组飞轮力矩的测试与分析[J].大电机技术,2013,39(9):21-24.
Gou Zhide, Fu Lixin, Li Guangde, et al.Test and analyse of flywheel moment for pumped storage unit[J]. Large Electric Machine and Hydraulic Turbine,2013,39(9):21-24. (in Chinese)
[11]赵岩,张晓琳,王军,等.基于Hilbert变换的时变转动惯量测量研究[J].机械工程学报,2012,48(20):22-26.
Zhao Yan, Zhang Xiaolin, Wang Jun, et al. Measurement of time-varying moment of inertia based on Hilbert transform[J]. Journal of Mechanical Engineering,2012,48(20):22-26 . (in Chinese)
[12]高波,韩逢庆,黄席樾,等.火箭飞行数据的两种滤波方法对比[J].重庆大学学报,2003,26(1):25-27.
Gao Bo, Han Fengqing, Huang Xiyue, et al. Comparison research of two filter approaches on the data of rocket[J]. Journal of Chongqing University,2003,26(1):25-27. (in Chinese)
[13]李洁明,祁新娥.统计学原理[M].5版.上海:复旦大学出版社,2012:348-358.
[14]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T1029—2005 三相同步电机试验方法[S].北京:中国标准出版社,2006.
[15]中华人民共和国公家质量监督检验检疫总局.GB/T 25442—2010 旋转电机(牵引电机除外)确定损耗和效率的试验方法[S].北京:中国标准出版社,2011.
[16]国际电工委员会.IEC60041.1—2004 旋转电机:定额与性能[S].瑞士:国际电工委员会,2004.

10.16450/j.cnki.issn.1004-6801.2015.05.020
*国家自然科学基金资助项目(51309258);中国水利水电科学研究院科研专项资金资助项目(机集1342)
2013-12-20;
2014-05-19
TM622; TP206; TK05
张飞,男,1983年2月生,高级工程师。主要研究方向为发电机组现场测试与状态监测技术。曾发表《混流式水轮机部分负荷下尾水管压力脉动试验研究》(《水利学报》2011年第42卷第10期)等论文。 E-mail:spiritgiant@126.com
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
中国特种设备安全(2022年2期)2022-07-08
防爆电机(2021年3期)2021-07-21
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
物理与工程(2019年2期)2019-07-09
时代汽车(2018年12期)2018-06-18
中国农村水利水电(2018年5期)2018-05-29
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09