履带车辆肘内式半主动油气悬挂性能研究*
2015-03-13 02:24高晓东管继富邢艳明
振动、测试与诊断 2015年5期
高晓东, 顾 亮, 管继富, 李 毅, 刘 锐, 邢艳明
(1.北京理工大学机械与车辆学院 北京,100081) (2.中国北方车辆研究所底盘部件技术部 北京,100072) (3.内蒙古第一机械集团有限公司科研所 包头,014032)
履带车辆肘内式半主动油气悬挂性能研究*
高晓东1,2, 顾 亮1, 管继富1, 李 毅3, 刘 锐3, 邢艳明3
(1.北京理工大学机械与车辆学院 北京,100081) (2.中国北方车辆研究所底盘部件技术部 北京,100072) (3.内蒙古第一机械集团有限公司科研所 包头,014032)
肘内式油气悬挂与传统油气弹簧相比,能够以较小的体积和质量,提供更高的负载能力。将履带车辆肘内式油气悬挂单轮模型与半主动控制相结合,进行了半主动肘内式油气悬挂动态特性分析,提出了基于天棚算法的半主动双环控制策略,外环控制器计算目标阻尼力对应的阀芯位置,内环控制器控制阀芯跟踪目标位置,从而达到改善履带车辆平顺性的目的。探索了Virtual.Lab,AMESim和Matlab之间的集成接口,搭建了机电液耦合系统的联合仿真虚拟试验平台,并在该平台对控制算法进行了验证,结果表明肘内式油气悬挂半主动性能显著优于被动悬挂。
肘内式油气悬挂; 半主动悬挂; 联合仿真; 天棚算法
引 言
军用履带车辆应满足在恶劣路面能够高速行驶的要求。为了提高行进间火炮的射击精度,需提高履带车辆行动部分的隔振效果。肘内式油气悬挂诞生于20世纪70年代,它不仅减振性能优越,而且结构紧凑,较常用的扭杆弹簧悬挂节省了大量车内空间[1]。各国都十分重视这一悬挂的应用。埃及军方于1984年底委托美国泰莱达因大陆汽车公司为其装备的苏制T-54加装了肘内式油气悬挂[2]。韩国军方已经在K2和K21型履带车辆上列装了肘内式油气悬挂,并在悬挂控制方面进行了许多的研究[3]。
笔者所在的项目组开发的肘内式油气悬挂集成了弹性元件和阻尼元件,在对肘内式油气悬挂弹性及阻尼特性分析的基础上,进行了基于天棚控制算法的肘内式半主动油气悬挂性能研究,并在虚拟仿真平台中对算法进行了验证。
1 肘内式基本结构和工作原理
1.1 肘内式基本结构
肘内式油气悬挂的基本结构如图1所示,此悬挂集成了弹性元件和阻尼元件,主要由液压缸、主活塞、活塞连杆、叶片减振器以及高压气室等部件组成。悬挂上支臂与履带车辆车体固连,负重轮安装于肘体轮轴处[4]。

图1 肘内式油气悬挂基本结构Fig.1 Schematic of in-arm suspension unit
1.2 肘内式油气悬挂工作原理
肘内式油气悬挂以平衡肘轴心为圆心,运动过程分为两步:当负重轮受到路面向上的激励时,负重轮与车体垂直方向的距离缩小,动力缸油液被挤压通过节流孔进入气室下端油腔,气室内高压氮气被压缩,产生弹性力;当激励消失,气室扩张,肘体回弹,负重轮与车体垂直方向的距离增加。肘内式油气悬挂具有非线性刚度特性。
肘内式油气悬挂内部减振器位于肘体回转中心,属于同轴式减振器,如图2所示。肘内式油气悬挂减振器内部工作空间注有油液,整个工作空间被叶片和隔板分为4个区域,叶片随肘体在壳体内转动,使叶片运动前方的工作空间形成高压腔,通过叶片上的常通阻尼孔,比例流量阀以及叶片与壳体,隔板与壳体之间的缝隙等流向低压腔,从而产生阻尼力。

图2 叶片式减振器工作原理图Fig.2 Operation principle drawing of rotary damper
该减振器结构对称,可以将其液压回路视为两套高低压油腔并联作用的结构。比例阀为该叶片式减振器阻尼调节装置,是该减振器核心部件,比例阀安装在隔板内部,为两位两通阀形式。电磁铁驱动阀芯运动,电流为零时,阀芯不动,阀口全开;当电流达到最大时,阀芯达到满行程,阀口关闭;一般情况下,开阀度随电流大小在两个极限位置间近似线性变化。
2 肘内式油气悬挂特性分析
2.1 肘内式油气悬挂弹性特性
履带车辆肘内式油气悬挂要同时满足大载荷和大行程两个要求,该悬挂油气弹簧压力较高,范围一般在4~30 MPa,需要进行试验得到其弹簧特性曲线。
在试验台架上,激振头以0.1 Hz激励肘内式油气悬挂,肘内式油气悬挂初始充气压力6 MPa。图3为肘内式油气悬挂气室压力与活塞位移的关系曲线。图4为气室刚度与活塞位移的关系曲线,表示油气弹簧由安装位置到动行程位置的刚度变化,零点位置为活塞位移155 mm处。图中显示当活塞移动到202 mm的位置时,副气室打开,气室刚度瞬时降低,防止在动行程位置气室压力过高。
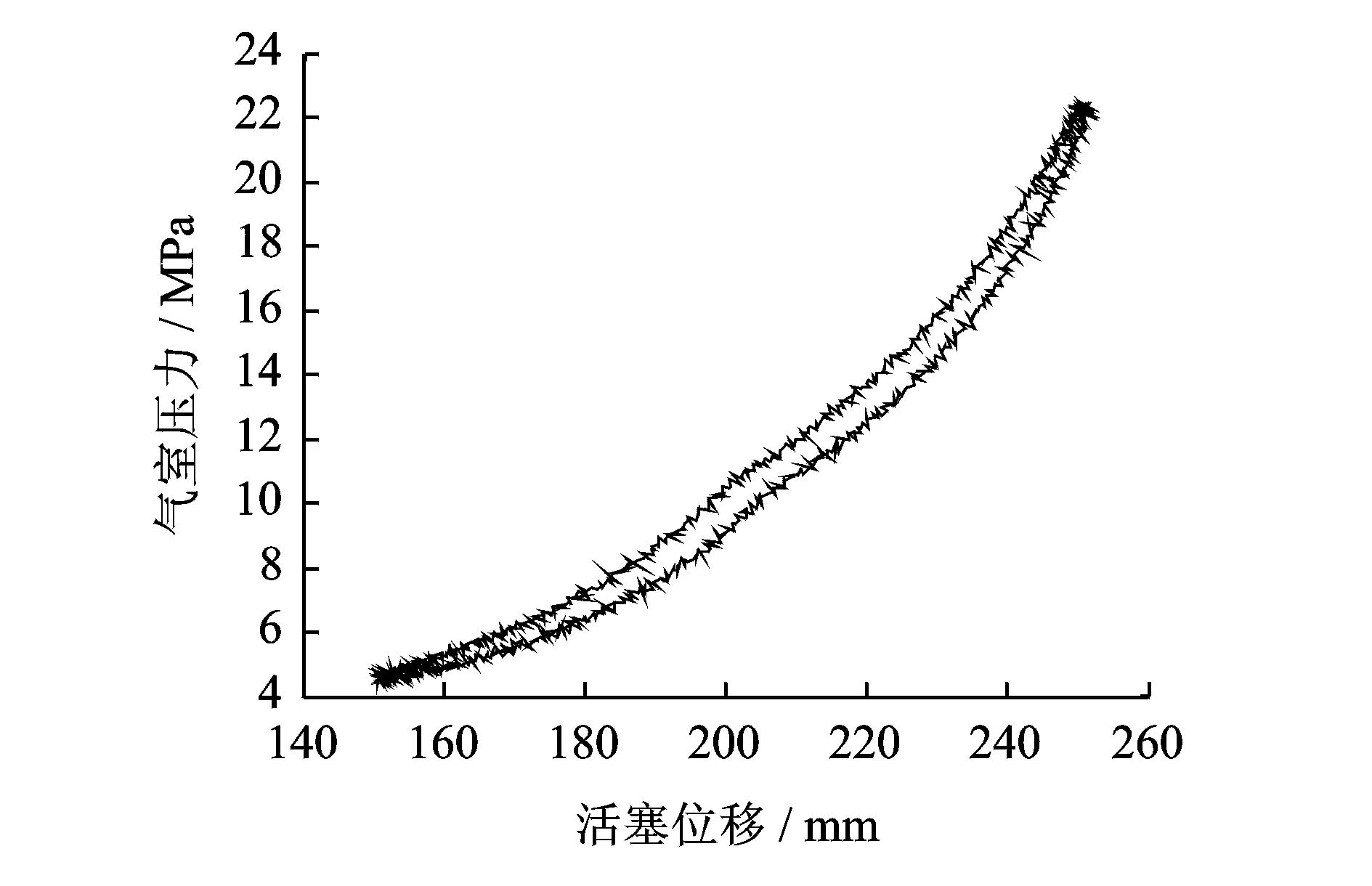
图3 作动缸压力-活塞位移关系Fig.3 Pressure-deflection of ISU unit
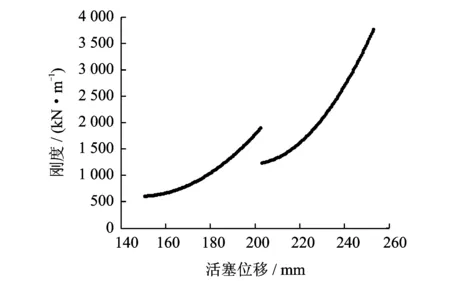
图4 弹簧刚度-活塞位移曲线Fig.4 Spring characteristics of ISU unit
2.2 肘内式油气悬挂阻尼特性

(1)

减振器工作腔内油液的总流量等于单位时间内叶片扫过的总体积,现假定平衡肘长度为rb,叶片轴角速度为ω,则通过叶片内外径Dn,Dw,宽度为b的叶片一侧流向另一侧的液体流量Q[5-7]为
(2)
(3)
其中:比例阀流量系数cv为
(4)
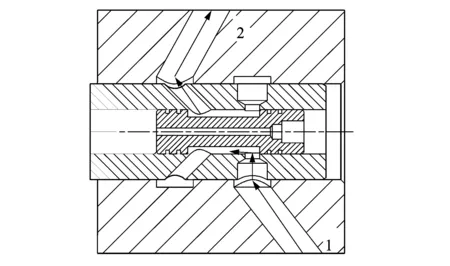
图5 比例流量阀结构简图Fig.5 Structure of the proportion valve
(5)
式(1)~(5)即系统的阻尼动态特性模型。图6为工作温度为80℃时减振器阻尼力试验值曲线。由图6可知,通过增大减振器电磁阀驱动电流,比例阀阀芯动作使得节流口由全开到全闭变化,减振器的阻尼随着呈增大趋势。当控制阀全关时,新型可控叶片式液压减振器的输出阻尼力最大。
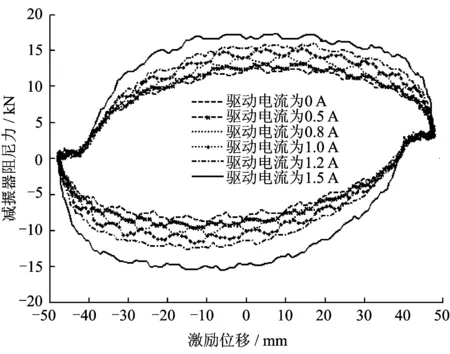
图6 减振器阻尼力试验曲线Fig.6 Semi-active damping characteristics
3 控制器设计
3.1 半主动控制算法

(6)
3.2 控制器的设计
本次试验将肘内式油气悬挂安装在浮动墙试验台架上,通过安装传感器,采集簧上质量振动加速度与平衡肘摆角数据。簧载质量振动速度信息通过对加速度数据作积分得到,积分初值设定为0 m/s。
笔者所用半主动控制系统结构如图7所示。控制系统外环使用天棚阻尼控制算法,控制系统内环设计了基于模型的比例阀电压控制器,天棚阻尼控制算法产生最优目标阻尼力输入控制内环,控制内环将最优阻尼力与电液比例阀产生的阻尼力差值进行PID控制,将最优阻尼力转化为对应的电压信号输入电液比例阀,使阀芯处于目标位置,从而改变比例流量阀开度,产生减振器最优阻尼力,实现阻尼力的实时调节。
通过角度及簧载质量速度信息,半主动控制器计算出最优阻尼力Fder。此时通过平衡肘摆动角速度,确定出内环肘内式油气悬挂通过阻尼孔的流量和压降。实际模型产生的阻尼力与外环天棚算法最优阻尼力Fder进行比较,并运用PID控制算法控制追踪误差[9],得到比例流量阀最优开度,从而可以通过改变电磁阀电流调整阀芯位移,实现控制效果。据此可以制定天棚阻尼控制阻尼力Fdamp为
(7)
阻尼系数定义为
(8)
其中:Cmin为阀芯位移x=0 mm时的阻尼系数;Cmax为阀芯位移最大时的阻尼系数。
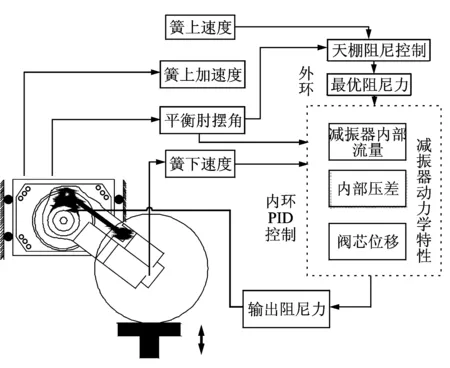
图7 半主动控制示意图Fig.7 Schematic diagram of semi-active control system
4 肘内式油气悬挂算法验证
由于肘内式油气悬挂半主动控制系统是一个机电液一体化系统[10],现利用多软件平台进行联合建模与仿真分析。具体方法为:通过建立软件间的仿真接口,某一仿真软件可将仿真数据作为系统输入信号通过接口传递给另一仿真软件模型,后者在该信号的作用下产生相应响应,又可以反馈给前者,由此仿真数据就可实现双向传递。肘内式油气悬挂的多体动力学模型在LMS Virtual.Lab软件中搭建。液压模型在LMS Imagine. Lab AMESim液压软件中搭建。控制模型在Simulink中搭建。参数关联关系如图8所示。
如图9所示,肘内式油气悬挂半主动性能试验首先采用0~5 Hz正弦输入,60 mm幅值,天棚阻尼系数选择2.4 kNm/s;接下来以某试验场砂石路面、起伏路面及戈壁路面数据输入做试验,车速选取30~40 km/h。试验中悬挂参数为簧上质量为2 000 kg,簧下质量为150 kg,阻尼系数为1.5 kNm/s。
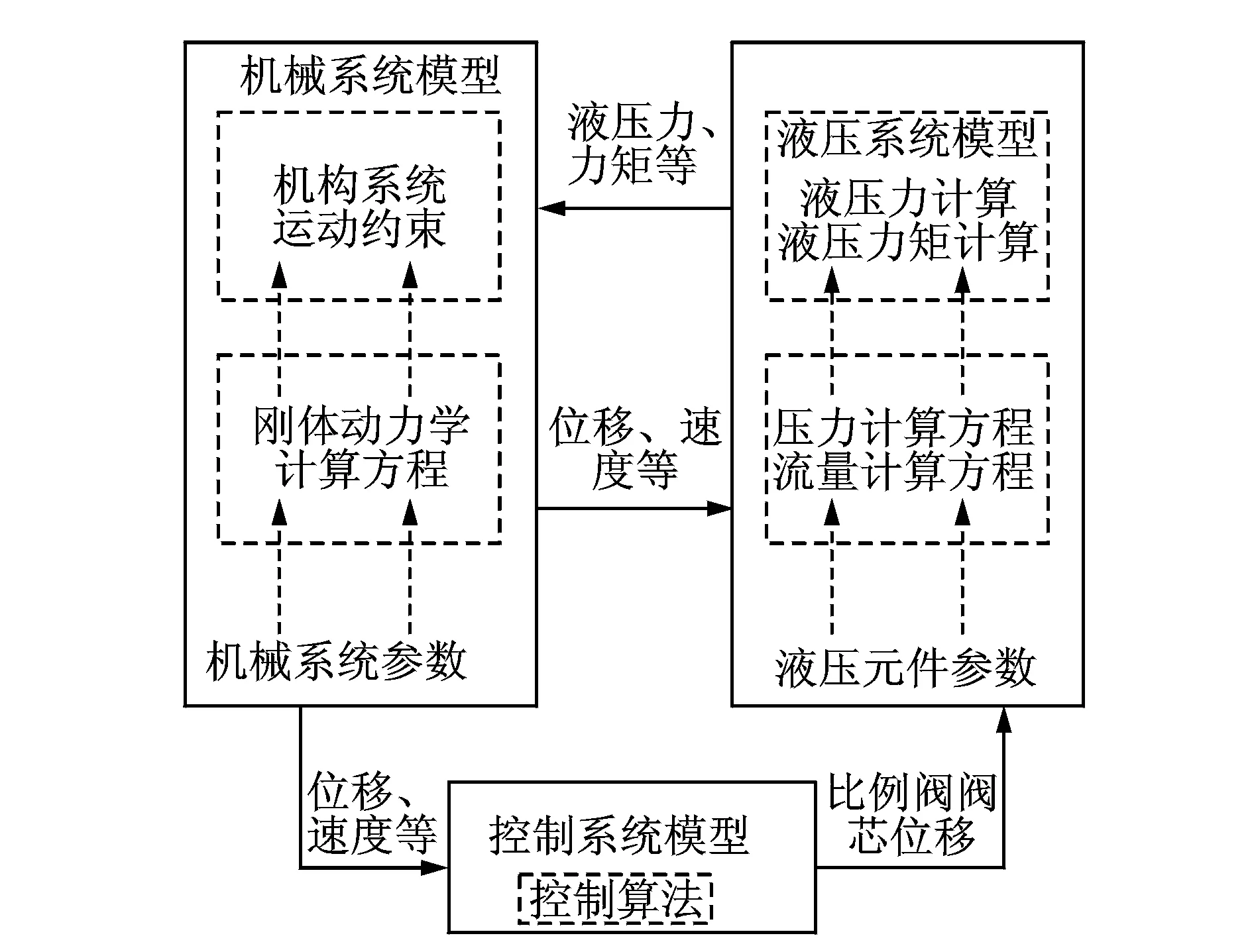
图8 机械、液压、控制系统之间的参数关系Fig.8 Relationship between mechanical, hydraulic, control systems
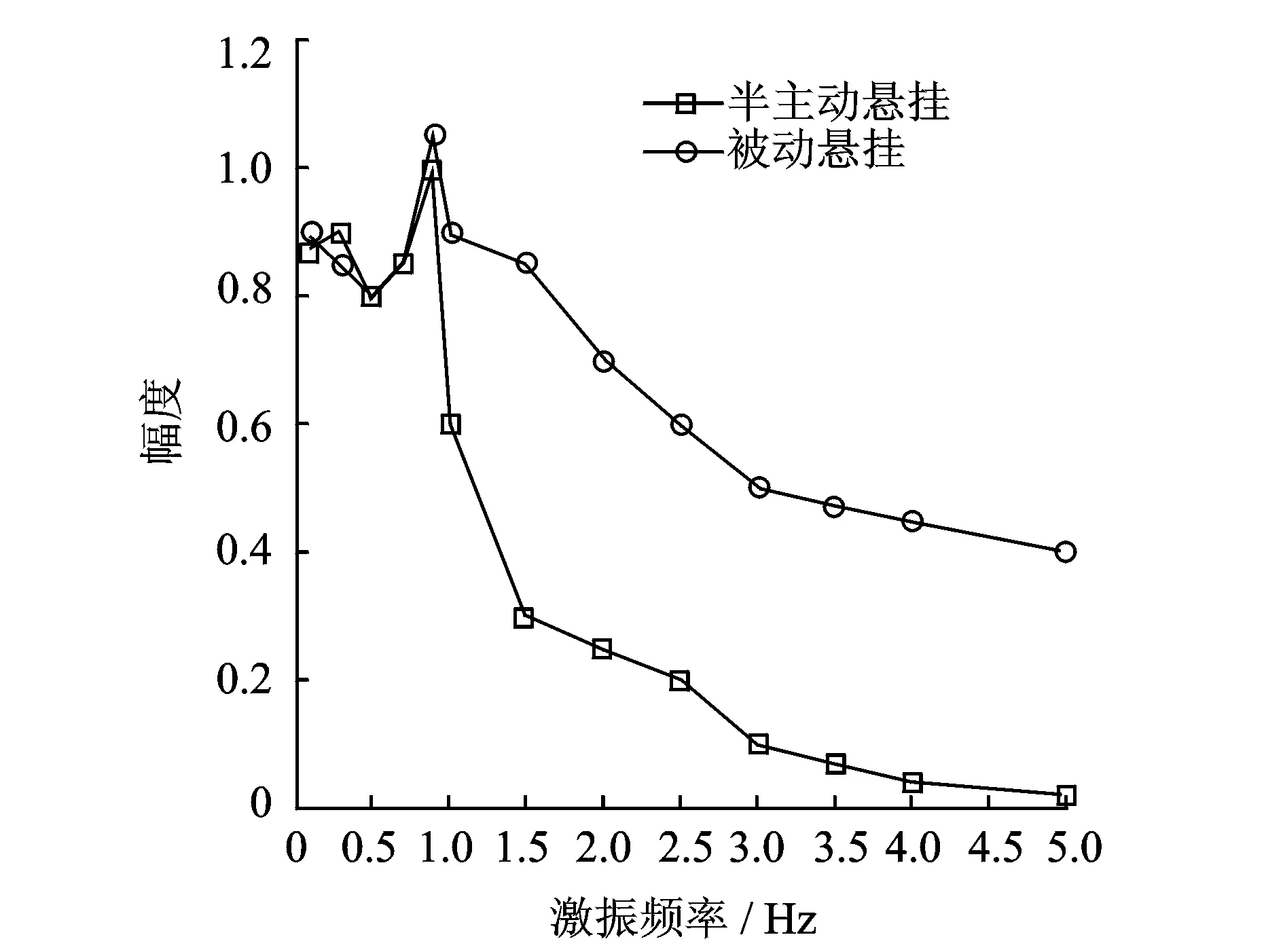
图9 肘内式油气悬挂幅频特性Fig.9 Amplitude-frequency characteristics of ISU
如图9和图10所示,1 Hz以上的半主动性能远优于被动悬挂,而1 Hz以下基于天棚算法的半主动悬挂性能没有得到明显改善,后期可以通过有限带宽主动悬挂控制改进。通过3种试验场路面谱输入试验,半主动悬挂在3种路面均方值均有减小,其中:砂石路面减小18.5%;起伏路面减小22%;戈壁路面减小10%。
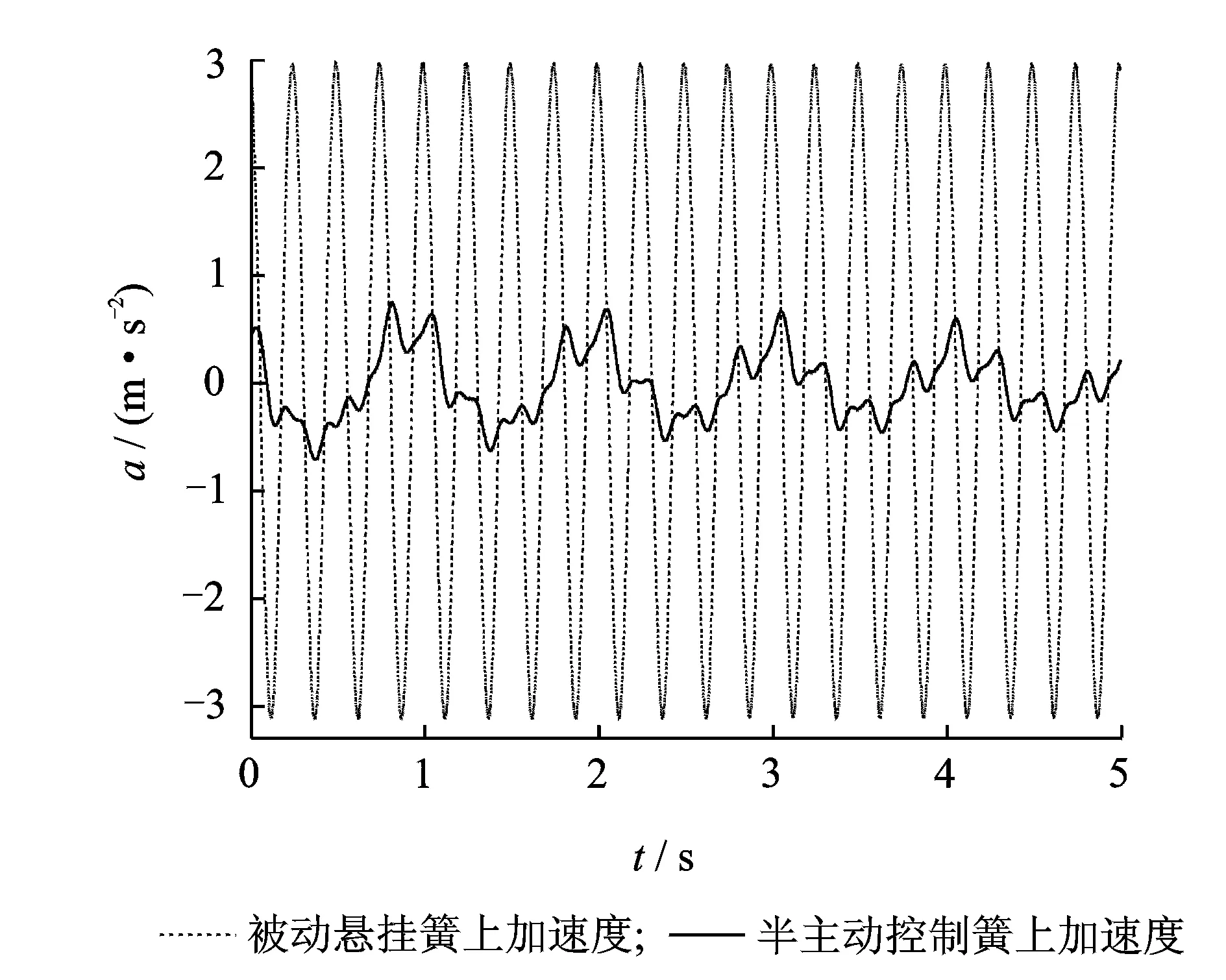
图10 簧载质量振动时域曲线(4 Hz)Fig.10 Vibration of sprung mass(4 Hz)
结果表明,利用天棚阻尼算法对肘内式油气悬挂单轮模型进行半主动控制能够有效降低车身振动加速度,在3种典型路面上仿真,与原被动悬挂相比半主动悬挂簧上质量加速度均方值均明显减小,证明了天棚半主动悬挂系统的有效性。
5 结束语
项目组开发的肘内式油气悬挂控制系统,可以通过调节内部减振器阻尼阀的开度,使系统最大阻尼力在8~16 kN范围变化,可有效改善履带车辆的行驶平顺性。基于天棚阻尼算法的半主动控制性能优良,通过3种路面数据输入测试,性能分别提高了18.5%,22%和10%,簧载加速度得到改善,为新型履带车辆的研发提供了保障。
[1] 丁法乾. 履带式装甲车辆悬挂系统动力学[M]. 北京: 国防工业出版社, 2004:127-134.
[2] Saxon N L, Meldrum W R. Semiactive suspension: a mobility case study[J]. Society of Automotive Engineers Transactions, 1997,106(6):541-547.
[3] Cho J R, Lee H W, Yoo W S, et al. Study on damping characteristics of hydropneumatic suspension unit of tracked vehicle[J]. The Korean Society of Mechanical Engineers International Journal, 2004,18(2):262-271.
[4] Stack S M. Development and testing of a hydropneumatic suspension system on a USMC AAV7A1[R]. Bethesda,MD:Defence Technical Information Center, 1991.
[5] 张进秋,彭志召,张建,等. 叶片式磁流变液减振器结构设计与优化[J]. 振动、测试与诊断,2013,33(1):132-137.
Zhang Jinqiu, Peng Zhizhao, Zhang Jian, et al. Design and optimization of vane magneto-rheological fluid damper[J]. Journal of Vibration, Measurement & Diagnosis, 2013,33(1):132-137. (in Chinese)
[6] 王文瑞,顾亮,王国丽,等. 可控叶片式减振器的阻尼特性分析[J]. 液压与气动, 2008,31(7):35-38.
Wang Wenrui, Gu Liang, Wang Guoli, et al. Analysis of damping characteristics about controllable vane damp[J]. Chinese Hydraulic & Pneumatics, 2008,31(7):35-38.(in Chinese)
[7] 高晓东,管继富,顾亮,等. 履带车辆油气悬挂弹性特性研究[J]. 拖拉机与农用运输车, 2014,41(4):10-13.
Gao Xiaodong, Guan Jifu, Gu Liang, et al. Stiffness characteristic in hydro-pneumatic suspension of tracked vehicle[J]. Tractor & Farm Transporter, 2014,41(4):10-13.(in Chinese)
[8] Karnopp D, Crosby M J, Harwood R A. Vibration control using semi-active force generator[J]. ASME Journal of Engineering of Industry, 1974,2(96):619-626.
[9] 陈月霞,陈龙,黄晨,等. ECAS车辆车身高度调节系统与整车性能匹配研究[J]. 振动、测试与诊断, 2013,33(S1):73-76.
Chen Yuexia, Chen Long, Huang Chen, et al. Research on body height adjustment system for vehicles with electrically controlled air suspension and performance compromise[J]. Journal of Vibration, Measurement & Diagnosis, 2013,33(S1):73-76.(in Chinese)
[10]马长林,黄先祥,李锋,等. 大型装置起竖系统智能积分控制仿真研究[J]. 兵工学报, 2008,29(2):227-231.
Ma Changlin, Huang Xianxiang, Li Feng, et al. Simulation study of intelligent integraion control for large mechanism erection system[J].Acta Armamentarii,2008,29(2):227-231.(in Chinese)

10.16450/j.cnki.issn.1004-6801.2015.05.027
*部级预研项目(104010210)
2014-07-23;
2014-12-03
U489
高晓东,男,1983年10月生,博士生。主要研究方向为履带车辆虚拟样机仿真及油气悬挂控制。曾发表《履带车辆油气悬挂弹性特性研究》(《拖拉机与农用运输车》2014年第41卷第4期)等论文。 E-mail:bitgaoxiaodong@sina.cn
猜你喜欢
民间故事选刊(2022年12期)2022-10-30
疯狂英语·初中天地(2022年9期)2022-08-29
装备制造技术(2020年11期)2021-01-26
北京理工大学学报(2020年11期)2020-12-15
装饰装修天地(2020年10期)2020-07-04
振动、测试与诊断(2017年5期)2017-11-07
科学与财富(2017年12期)2017-05-16
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
汽车工程(2015年8期)2015-04-12