
基于RLS算法与G-S算法的抗干扰分析*
2015-03-14 11:02李成全孙维忠
舰船电子工程 2015年8期
李成全 孙维忠 张 雄
(武汉船舶通信研究所 武汉 430205)
基于RLS算法与G-S算法的抗干扰分析*
李成全 孙维忠 张 雄
(武汉船舶通信研究所 武汉 430205)
文章简要分析了两种广泛应用的自适应波束形成算法:RLS算法与Gram-Schmidt正交化算法。基于这两种算法在线阵、面阵、圆阵中的应用进行了Matlab仿真,通过对比两种算法的性能,得出结论,在抗干扰应用时,G-S算法的计算量远远小于RLS算法,G-S算法性能优于RLS算法。
抗干扰; RLS算法; Gram-Schmidt算法
Class Number TP301.6
1 引言
利用阵列天线产生定向波束技术已经被广泛应用于雷达、声纳、通信以及卫星导航等领域[1~2],可充分利用空间维度来提高系统性能。但在信道中,不可避免地存在着干扰和噪声,它们通过方向图的边波束或主波束进入接收系统,从而降低系统的接收信噪比。随着天线技术和信号处理技术的发展,自适应波束形成技术在阵列天线中的运用可有效解决这些干扰带来的影响,从而保证阵列天线工作在最佳状态,提升系统性能。
自适应波束形成技术的主要目的是使阵列天线方向图的主瓣指向所需的方向,而使其零陷对准干扰方向,尽可能地提高阵列输出所需信号的强度,同时减小干扰信号的强度,从而提高阵列输出的信干噪比。即通过各阵元加权进行空域滤波,达到增强有用信号,抑制干扰的目的。实际工程中,通常要求自适应波束形成算法具有稳健性好、运算量小、收敛速度快和干扰抑制能力强等性能。
递推最小二乘算法(Recursive Least Square,RLS)和Gram-Schmidt(GS)正交化算法均是广泛应用的自适应波束形成算法。
2 自适应波束形成算法
2.1 RLS算法
递推最小二乘算法(即RLS算法)[3~6]是用二乘方的时间平均的最小化准则取代最小均方准则,并按时间进行迭代计算,是要对初始时刻到当前时刻所有误差的平方进行平均并使其最小化,再根据这一准则从而确定加滤波权矢量w,即所依据的准则是
(1)
其中
El=Dl-Yl
(2)
式(2)中,Dl是第l次快拍的期望响应,Yl是所有阵元第l次快拍的加权后的输出响应,即
Yl=WTXl
(3)
对于非平稳输入信号,引入一个指数加权因子对式(1)进行修正,有
(4)
式(4)中,指数加权因子δ称为遗忘因子,它是小于1的正数。由式(4)可知,新得到的数据比旧的数据更重要,旧数据权值按指数规律衰减,越旧的数据对εL的影响越小。
按式(4)的最小化准则决定最佳权矢量。εL对w求导并令其等于零,得
(5)
这是最小二乘方准则所对应的正交方程。上式经整理后得到标准方程
(6)
定义
(7)
则标准方程可写成简化形式
RlW=Pl
(8)
令
(9)
则该方程的解为
Wl=TlPl
(10)
将式(10)写成按l进行迭代计算的形式便推导出RLS算法。首先将式(7)写成迭代形式
(11)
根据式(9)得到
(12)
将式(11)和式(12)代入式(10)得到
(13)
综上所述,RLS算法的步骤如下:

2) 对每次快拍对应的期望响应Dl和输入信号Xl,l=1,2,…,L,进行迭代运算,根据式(13)得到更新的权矢量wl;
3) 若l≠L进行第l+1次迭代计算,否则结束计算。
2.2 GS算法
Gram-Schmidt正交化算法(简称G-S算法)拥有数值特性好,算法结构便于并行实现,处理速度快,运算量小等诸多优点,适用于接收天线阵遇到强干扰的情况下[7~10]。
设接收天线阵由N个单元组成的均匀线阵,阵列接收到的信号矢量为X(t),设对信号矢量X(t)的加权矢量为w,则自适应波束形成网络的输出为
y(t)=wTX(t)
(14)
其中接收的信号矢量X(t)由期望信号XS(t)和干扰信号XJ(t)构成,即
X(t)=XS(t)+XJ(t)
(15)
则
y(t)=wTXS(t)+wTXJ(t)
(16)
假设XJ(t)包含M个干扰信号,即
XJ(t)=XJ1(t)+XJ2(t)+…+XJM(t)
(17)
在求和式(16)中wTXS(t)为期望的输出,wTXJ(t)为不期望的干扰输出,因此,为使输出没有干扰,应使干扰信号矢量XJ(t)加权之后的wTXJ(t)为零。即
wTXJi(t)=0,i=1,2,…,M
(18)
要使波束形成的输出不含有干扰成分,应使加权矢量w与每一个干扰信号矢量正交,或者应使加权矢量w与M个干扰信号矢量所构成的干扰信号空间正交,则可在接收的期望信号脉冲休止期间采集M个含有干扰的信号矢量,进行重构干扰信号空间。
假设接收到的M个干扰信号矢量为XJ(i),i=1,2,…,M。则
S[XJ1(t),XJ2(t),…,XJM(t)]≈
S[XJ(1),XJ(2),…,XJ(M)]
(19)
加权矢量w与干扰信号空间正交等效于w与M个干扰信号矢量合成的干扰样本空间正交。因此,应首先对采集的M个含有干扰的信号矢量进行正交化处理,即可得到干扰信号空间的一组正交基。此时,最佳权矢量即可通过原始权矢量与该正交基组正交得到。
G-S算法是利用内积的特性,由内积空间的任一基X1,X2,…,XL找到与该内积空间的一组正交基Z1,Z2,…,ZL和一组标准正交基Y1,Y2,…,YL的方法。它们的关系如下:
Z1=X1
Yl=Zl/‖Zl‖l=1,2,…,L
(20)
G-S算法的正交化过程如下:
设所求的正交基中第一个向量为Z1=X1,再令
Z2=X2+kZ1
(21)
由正交条件(Z2,Z1)=0可确定待定系数k。
由(X2+kZ1,Z1)=(X2,Z1)+k(Z1,Z1)=0
(22)
求得
(23)
所以,

=X2-(X2,Y1)Y1
(24)
到此得到两个正交向量Z1,Z2。
再令
Z3=X3+k2Z2+k1Z1
(25)
再由正交条件(Z3,Z2)=0和(Z3,Z1)=0可求得k2和k1为
(26)
(27)
此时以求得三个两两正交且不为零的向量Z1,Z2,Z3。
假设已求得M个两两正交且不为零的向量Z1,Z2,…,ZM,为求得第M+1个与之正交的向量,让
ZM+1=XM+1+LMZM+LM-1ZM-1+…+L2Z2+L1Z1
(28)
利用M个正交条件
(ZM+1,Zi)=0,i=1,2,…,M
(29)
来确定LM,LM-1,…,L2,L1,根据Z1,Z2,…,ZM两两正交的假设,可得
(XM+1,Zi)+Li(Zi,Zi)=0,i=1,2,…,M
(30)
即得
(31)
则ZM+1即被确定,同时YM+1也确定下来,由此即可进一步推算出最佳加权矢量。以下介绍由预加权w0(期望方向矢量)得到最佳加权w的过程。
M个干扰源构成的干扰空间{X1,X2,…,XM}的正交基和标准正交基都已求得,分别为{Z1,Z2,…,ZM}和{Y1,Y2,…,YM}。
为使权值w对消M个干扰信号,应使w与干扰空间正交,即使{Z1,Z2,…,ZM}⊥w,其充分必要条件为w与每一正交基Z1,Z2,…,ZM正交。则由前述向量组的G-S正交化方法可求得最佳加权值为
w=w0-(w0,Y1)Y1-(w0,Y2)Y2-…-(w0,YM)YM
(32)
3 Matlab仿真分析
3.1 线阵的抗干扰
16元均匀线阵的G-S算法和RLS算法仿真:
仿真一:期望信号的到达角为96°,信噪比为0dB,干扰信号的到达角分别为22°和133°,干噪比分别为31dB,36dB。分别采用G-S算法和RLS算法进行波束形成,得到仿真图为图1、图2,虚线代表处理前,实线代表处理后。

图1 干扰为强干扰时的G-S算法仿真
仿真二:将仿真一中的干噪比改为6dB,11dB。分别采用G-S算法和RLS算法进行波束形成,得到仿真图为图3、图4,虚线代表处理前,实线代表处理后。
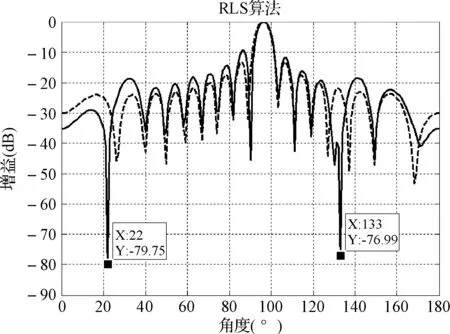
图2 干扰为强干扰时的RLS算法仿真
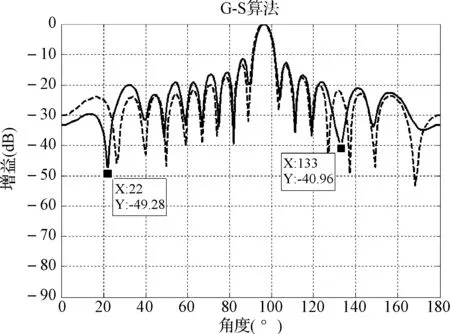
图3 干扰为弱干扰时的G-S算法仿真

图4 干扰为弱干扰时的RLS算法仿真
由上述得到仿真图对比可看出,在强干扰情况下,G-S算法和RLS算法都能很好地在指定角度形成-70dB以下的零点;当干扰信号强度变弱,即信干比降低时,G-S算法形成的零点深度-40dB以下,RLS算法形成-50dB以下的零点。由此表明G-S算法和RLS算法,无论是在强干扰或是弱干扰情况下使用,都能很好地在干扰方向形成零点;但RLS算法采用了500次快拍数据,而G-S算法只采用了两次快拍数据就能得到最佳加权值,因此G-S算法计算量小,速度较快。
3.2 面阵的抗干扰
13×13个单元均匀矩形平面阵的G-S算法和RLS算法仿真:
设矩形平面阵阵面垂直水平面,即阵面中心法线与水平面平行,法线方向是方位角0°、俯仰角0°,则方位角、俯仰角范围都是-90°至90°,仿真只考虑俯仰角为0°,方位角变化的波束形成。假设期望信号的到达角为-13°,信噪比为0dB,三个干扰信号的方位到达角分别为-69°、15°和63°,干噪比分别为34dB、37dB、43dB,G-S算法采样快拍数为3,RLS算法采样快拍数为500,仿真图如下图5、图6所示,虚线代表处理前,实线代表处理后。

图5 面阵的G-S算法仿真

图6 面阵的RLS算法仿真
由以上仿真得到的水平面方向图可看出,当阵元数变多时,两种算法的抗干扰效果都有所提高;但RLS算法比G-S算法的采样快拍数多很多,使得RLS算法的计算量大,抗干扰实时性差,同时该算法在指定角度形成的零陷深度不如G-S算法,因此再次验证了在强干扰情况下,RLS算法的性能不如G-S算法。
3.3 圆阵的抗干扰
二维均匀圆环阵中阵元数为16个单元时,干扰信号仍为强干扰时的G-S算法和RLS算法仿真:
假设设16元圆环阵仿真只考虑俯仰角为90°,方位角变化,即水平面的波束形成。假设期望信号的到达角为-17°,信噪比为5dB,有三个干扰信号,其方位到达角分别为-115°、91°和167°,干噪比分别为34dB,37dB,43dB,G-S算法采样快拍数为3,RLS算法采样快拍数为500,仿真图为图7与图8所示,虚线代表未经算法处理之前的方向图,实线代表经算法处理之后的方向图。

图7 圆形阵列的G-S算法仿真
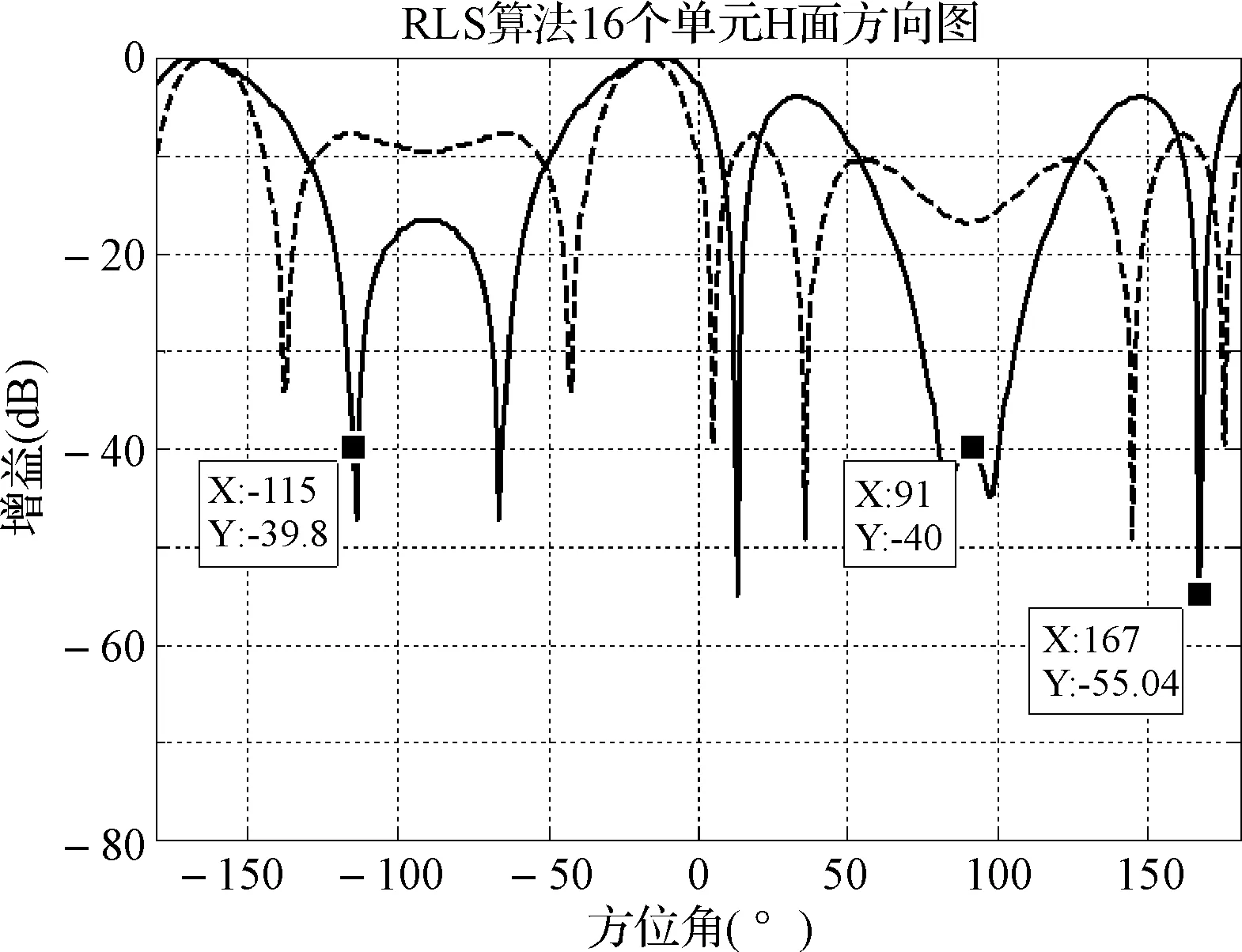
图8 圆形阵列的RLS算法仿真
由以上仿真可看出,得到的水平面方向图RLS算法零点深度不如G-S算法,G-S算法的零点深度均达到了-54dB以下,而RLS算法的零点最深为-55dB,且RLS算法使主瓣明显展宽的更宽,旁瓣电平也明显G-S算法,同时RLS算法的大运算量更使得其抗干扰的综合性能不如G-S算法。
4 结语
RLS算法与G-S算法作为常用的自适应波束形成算法,均有各自的特点,本文通过对两种算法在线阵、面阵、圆阵中的应用进行仿真对比分析,最终得出结论,G-S算法优于RLS算法,更适于阵列天线的实时抗干扰运用。
[1] Van Trees H L. Optimum array processing, part Ⅳ of detection, estimation and modulation theory[M]. New York: Wiley Press,2002:67-78.
[2] Applebaum S P. Adaptive arrays[J]. IEEE Trans,1976,AP-24(9):585-595.
[3] R. Johannestn, S. T. Ltd. The role adaptive antenna systems where used with GPS[J]. IEEE, ION,1988:267-270.
[4] Adali T, Ardalan S H. Fixed-point roundoff error analysis of the exponen-tially windowed RLS algorithm for time-varying systems[J]. Acoustics, Speech, and Signal Processing,1991,3:1865-1868.
[5] Hung E K L, Turner R M. A fast beam-forming algorithm for large arrays[J]. IEEE Trans on AES,1983,19(4):598-607.
[6] 姚天任,孙洪.数字信号处理[M].武汉:华中科技大学出版社,1999:93-99.
[7] 张斌.高效稳健的自适应滤波算法研究[D].西安:西安电子科技大学博士论文,2010:13-31.
[8] K. A. Gallivan. High Performance Archit-ectures for Adaptive Filtering Based on The Gram Schimidt Algorithm[J]. Proc.of SPIE, Real Time Signal Processing Ⅶ,1984,495:30-38.
[9] F. Ling. A Recursive Modified Gram Schmidt Algorithm for Least Squares Estimation[J]. IEEE Trans on ASSP,1986,34(8):829-835.
[10] 陈建春,赵树杰.基于G-S算法的脉冲追赶式自适应DBF实现技术[J].西安电子科技大学学报,1999,26(5):541-544.
Analysis of Anti-jamming Based on RLS Algorithm and G-S Algorithm
LI Chengquan SUN Weizhong ZHANG Xiong
(Wuhan Maritime Communication Research Institute, Wuhan 430205)
Two widely used adaptive beamforming algorithms are analyzed briefly in this paper, including the RLS algorithm and the Gram-Schmidt orthogonal algorithm. The application of these two algorithms in line array, planar array and circular array is simulated by the Matlab. By comparing the performance of the algorithms, it is concluded that the computation of the G-S algorithm is much smaller than the RLS algorithm, and the G-S algorithm outperforms the RLS algorithm in the anti-jamming applications.
anti-jamming, RLS algorithm, G-S algorithm
2015年2月3日,
2015年3月17日
李成全,男,硕士,研究方向:舰载通信天线,抗干扰阵列天线。孙维忠,男,硕士,研究方向:相控阵天线。张雄,男,研究方向:微带天线,舰载通信天线。
TP301.6
10.3969/j.issn1672-9730.2015.08.013
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
信息通信技术(2022年2期)2022-05-31
新高考·高三数学(2022年3期)2022-04-28
海军航空大学学报(2021年1期)2021-09-01
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信电源技术(2020年22期)2020-03-27
