地铁列车受电弓结构参数优化设计
2015-03-14 06:48朱壮瑞
机电信息 2015年15期
周 森 朱壮瑞 贾 方
(东南大学,江苏 南京211189)
0 引言
随着生活水平的不断提高,人们对城市地铁的要求也越来越高,高速、快捷、舒适的乘车环境是地铁发展的必然趋势[1]。受电弓作为地铁车辆的一个重要部件,其性能的好坏对地铁车辆的安全稳定良好运行具有至关重要的影响,而受电弓的受流稳定性就是衡量受电弓性能的一个重要因素[2-3]。
为了保证受电弓具有良好的受流性能,本文以某地铁车辆的单臂受电弓为例,对其进行了结构优化设计,并对优化设计的结果进行了验证。根据地铁与轻轨车辆受电弓标准[4],当升弓范围E≥2m时,弓头轨迹相对垂直线的最大偏差要小于30mm;受电弓升弓所需的升弓转矩是受电弓设计中最重要的参数之一,要在保证静态接触压力为(120±10)N的基础上,尽可能减小升弓转矩。此外,为了保证在受电弓升弓过程中弓头与接触网的稳定受流,减小弓网间的冲击和接触力的变化,弓头应始终处于水平位置。
本文运用多目标优化技术,在建立受电弓结构几何参数数学模型[5]的基础上,以受电弓正常工作所需满足的条件为约束,对其结构参数进行了优化,得到了使受电弓性能达到最优化的设计参数。结果表明,优化后的模型符合地铁与轻轨车辆受电弓的国家标准。
1 受电弓机构几何关系模型的建立
图1为受电弓结构的几何关系数学模型图,AD为下臂杆,也为受电弓四杆机构运动的主动件,其与水平面的夹角α为受电弓的升弓角,β为平衡杆EF与竖直方向的夹角,是衡量弓头摆动的参数。图中L1~L7、a、b、e、g等11个参数为受电弓结构参数优化的设计变量,对受电弓进行参数优化,即寻求一组最佳设计变量值,使得受电弓的性能达到最优。
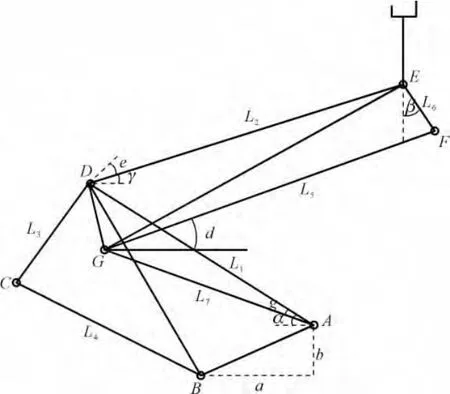
图1 受电弓结构几何关系数学模型图
如图1所示,以B点为坐标原点,建立受电弓几何关系数学表达式,可以得到以下结果:
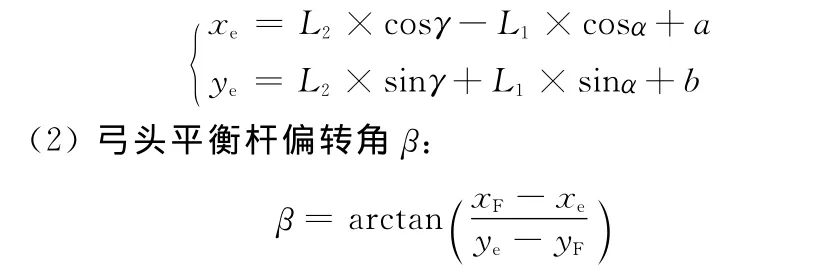
(1)弓头运动轨迹方程。设xe、ye弓头E点横坐标与纵坐标,则有:
2 受电弓几何参数优化设计
由于弓头轨迹坐标以及弓头平衡杆偏转角均为多变量的函数,故本文基于Matlab采用多目标优化设计方法对受电弓进行参数优化设计。
受电弓在正常工作过程中要满足一定的要求:
(1)受电弓的工作高度(弓头最高点与绝缘子底面之间的垂直距离)范围为400~2 400mm。
(2)落弓高度为300mm。
(3)根据国标,升弓范围大于等于2m时,弓头轨迹偏差最大不得超过30mm。为保证弓头在降弓和升弓过程中尽量作竖直上下运动,在工作高度内弓头的运动轨迹在工轴方向上的偏差应尽量小,最大偏差不能超过30mm。
(4)在工作过程中平衡杆应始终近乎平动,以保证弓头始终处于水平位置。
(5)升弓转矩应保证弓网之间静态接触压力为(120±10)N。
2.1 弓头运动轨迹和升弓转矩的优化
弓头轨迹与升弓转矩均为变量 L1、L2、L3、L4、a、b、e的函数,因此,对弓头轨迹与升弓转矩的优化,即寻求一个合理的L1、L2、L3、L4、a、b、e值,使得弓头轨迹与升弓转矩满足一定的条件。这是一个多目标优化设计的过程。
多目标优化问题的解法有很多,在本项目中,由于受电弓的升弓转矩并没有一个苛刻的要求,只是要在保证静态接触压力为(120±10)N的基础上尽可能减小升弓转矩。因此,本文将多目标优化转化为单目标优化进行求解,即将弓头的运动轨迹作为目标优化函数,将升弓转矩转化为弓头轨迹优化的一个约束条件。
受电弓正常工作需要满足的条件即受电弓弓头轨迹设计优化的约束条件:
(1)受电弓的工作高度(弓头最高点与绝缘子底面之间的垂直距离)范围为400~2 400mm,即 max(ye)≤2 400;
(2)落弓高度为300mm,即min(ye)≥300;
(3)如图1所示,受电弓机构可以看成是ABCD和DEFG两个四杆机构组成,因此各变量范围还需满足平面机构自由运动要求,由此可得出各设计变量的取值范围如下:1 400mm≤L1≤1 750mm;1 800mm≤L2≤1 900mm;200mm≤L3≤400mm;900mm≤L4≤1 246mm;765mm≤a≤780mm;130mm≤b≤170mm;0.1°≤e≤1.05°。
为保证弓头在降弓和升弓过程中尽量作竖直上下运动,在工作高度内弓头的运动轨迹在工轴方向上的偏差应尽量小,最大偏差不能超过30mm,因此,受电弓弓头轨迹优化的目标函数为:

2.2 平衡杆偏转角的优化
平衡杆偏转角β为变量L1、L2、L3、L4、L5、L6、L7、a、b、e、g的函数,经过弓头轨迹优化,可最终确定变量L1、L2、L3、L4、a、b、e的值,在此基础上,寻求变量L5、L6、L7、g的最优解,使得平衡杆偏转角β最小。
考虑运动要求和结构工艺要求,其约束条件为:1 800mm≤L5≤1 900mm;70mm≤L6≤100mm;1 500mm≤L7≤1 550mm;0.01°≤g≤0.04°。
平衡杆转角目标函数为:

3 优化结果分析
本文基于Matlab编程对受电弓几何参数进行多目标优化,结果如表1所示。
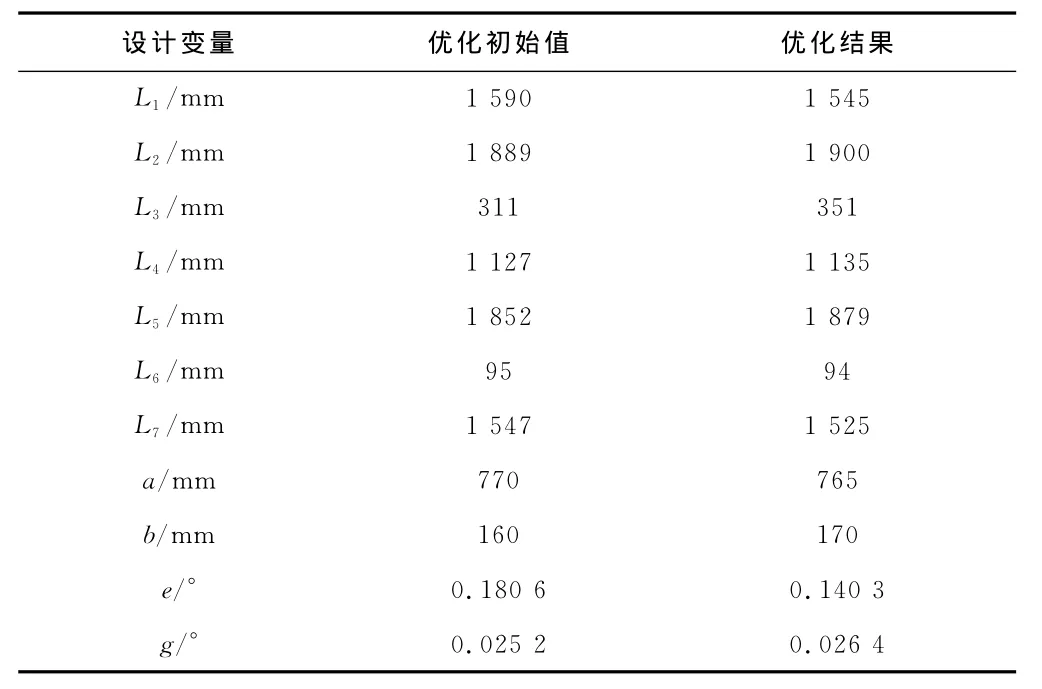
表1 优化前后设计变量的比较
3.1 弓头运动轨迹优化结果分析
受电弓优化前后弓头轨迹如图2和图3所示,优化前弓头在x方向上的最大偏移已经达到146.258mm,不满足受电弓正常工作条件,优化后弓头在x方向上的最大偏移为26.251 2mm<30mm,偏移量减少,完全达到技术规范和标准要求,使得受电弓在升弓过程中更稳定。
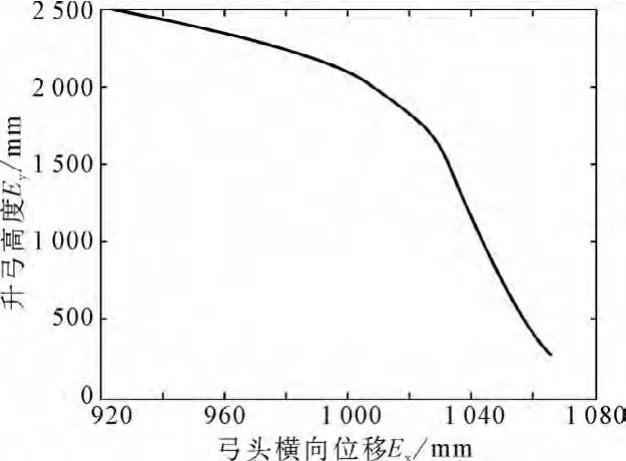
图2 优化前弓头轨迹
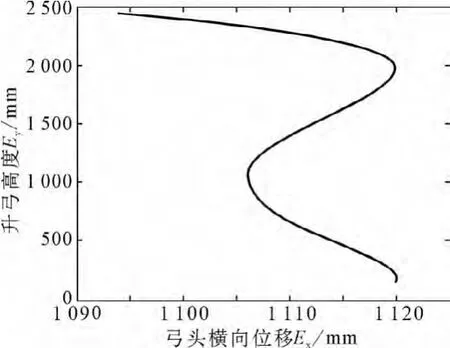
图3 优化后弓头轨迹
3.2 升弓转矩优化结果分析
受电弓正常升弓时,接触网对弓头保持120N压力,而静态接触压力是由升弓转矩提供的,因此对受电弓的升弓转矩就有一定的要求。通过虚位移原理计算出升弓转矩MB表达式,将优化后的尺寸参数代入式中,得到升弓转矩优化结果,如图4所示。

图4 Matlab中升弓转矩优化结果
从受电弓升弓转矩与弓头高度的关系图可以看出,在受电弓正常工作范围内,升弓时转矩从1 170N·m迅速减小到821.1N·m,变化速率越来越缓慢。
3.3 平衡杆偏转角优化结果分析
受电弓优化前后平衡杆偏转角对比图如图5所示,优化前弓头平衡杆偏转角β在-6.14°~5.65°之间波动,其偏离竖直方向最大偏转角为6.14°;通过Matlab编程,得到了一组最优的L5、L6、L7、g值,使得受电弓在升弓过程中,弓头平衡杆偏转角β在-0.93°~0.77°之间波动,其偏离竖直方向最大偏转角为0.93°。因此,经过优化弓头平衡杆更加接近于平动,达到了既定的目标,获得了使受电弓的运动性能达到最优的几何参数。
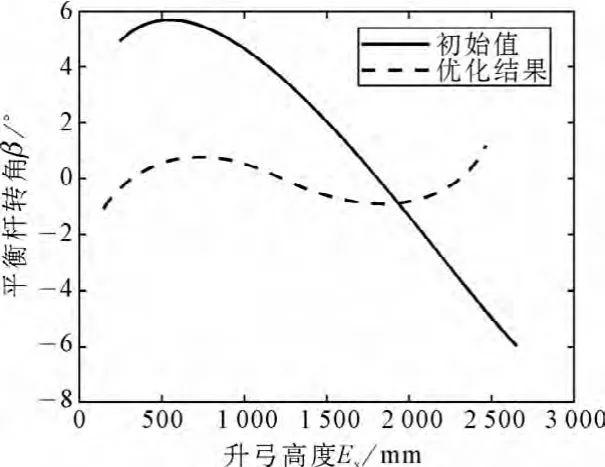
图5 优化前后平衡杆偏转角β与弓头位移ye之间的关系
4 结语
本文通过对地铁某单臂受电弓结构几何参数进行优化,得到了使受电弓获得更佳性能的一组优化参数。通过优化,弓头横向位移从146.258mm减小为26.251 2mm,大大减少了偏移量,完全达到技术规范和标准要求,使得受电弓在升弓过程中更稳定。弓头平衡杆最大偏转角由6.14°减小为0.93°,使弓头平衡杆更加接近于平动。因此,经过优化后的结构参数更加合理,受电弓性能更加优越。
[1]周晓津.中国城市地铁建设准入标准研究[J].中国软科学,2013(9):169-178.
[2]Zhou Ning,Zhang Weihua.Investigation on dynamic performance and parameter optimization design of pantograph and catenary system[J].Finite Elements in Analysis and Design,2011,47(2):288-295.
[3]Jin-Hee Lee,Young-Guk Kim,Jin-Sung Paik,et al.Perform-ance evaluation and design optimization using differential evolutionary algorithm of the pantograph for the high-speed train[J].Journal of Mechanical Science and Technology,2012,26(10):3252-3260.
[4]GB/T21561.2—2008 轨道交通 机车车辆受电弓特性和试验第2部分:地铁与轻轨车辆受电弓[S].
[5]张娟.现代CAD/CAE技术在受电弓设计中的应用研究[D].长沙:湖南大学,2004.
猜你喜欢
煤矿机电(2020年4期)2020-08-28
四川冶金(2018年1期)2018-09-25
机械工程师(2018年4期)2018-05-16
时代农机(2018年12期)2018-02-14
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
上海铁道增刊(2017年2期)2017-04-18
时代农机(2016年10期)2016-11-22
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
铁路技术创新(2011年4期)2011-10-25