基于POS与卫星地图改进的地图匹配定位方法
2015-03-15 06:08李建增李德良周子栋杜玉龙
无线电工程 2015年8期
张 岩,李建增,李德良,周子栋,杜玉龙
(军械工程学院,河北 石家庄 050003)
基于POS与卫星地图改进的地图匹配定位方法
张岩,李建增,李德良,周子栋,杜玉龙
(军械工程学院,河北 石家庄 050003)
摘要针对目前利用地图匹配定位受底图影响大、精度低、应用范围受限的问题,根据航摄影像与POS数据以及数字卫星地图特点,提出一种基于POS与卫星地图改进的地图匹配定位方法。利用卫星地图改良传统底图扩大应用范围,其次利用POS数据,根据制定的搜索策略确定整张航片在卫星地图上的匹配区域,以提高定位速度。实验结果证明该方法无需地面控制点即可实现大范围的目标实时二维定位,而且定位精度与速度都有较大提高。
关键词地图匹配;目标定位;POS
An Improved Map Matching Positioning Method Based on POS and Satellite Map
ZHANG Yan,LI Jian-zeng,LI De-liang,ZHOU Zi-dong,DU Yu-long
(PLACollegeofOrdnanceEngineering,ShijiazhuangHebei050003,China)
AbstractThe current map matching positioning method has such disadvantages as high influence from base map,low accuracy and limited application range.In view of these problems,this paper proposes an improved map matching positioning method based on POS and satellite map based on the characteristics of aerial image,POS data and satellite digital map.In order to increase the positioning speed,the base map is improved to extend the application range by using satellite map,and the matching area of the whole aerial image in satellite map is determined according POS data and search strategy.The experimental results show that this method can achieve a wide range of real-time two-dimensional positioning without ground control points,and the precision and speed are improved.
Key wordsmap matching;target positioning;POS
0引言
科技进步和实战需要推动了无人机定位技术的发展。目前,如何实现对目标快速精确定位是无人机研究领域的核心问题之一。无人机传统地图匹配与大气高度测量参数方法定位精度受底图影响,应用范围受限;而利用定位定向系统(Position and Orientation System,POS)无法适用于精确定位[1]。近年来,随着计算机视觉相关算法性能[2]及无人机POS技术的飞速发展,使得利用POS辅助图像匹配实现精确定位成为可能,而匹配算法是其核心内容。
1985年美国军方提出了在航空导航中的地形匹配技术,并构想了许多地形轮廓匹配系统方案,但该技术尚未应用于实际工程,无法证明其可行性。20世纪70年代初,美军通过研究证实了将地形比较法用于对惯导进行辅助的可行性,同时将此类系统应用于无人机上,但无法解决大范围实时定位问题。目前,美国Sandia公司通过改进图像匹配算法从而提高惯性地形辅助导航系统定位速度,并应用于战斧式续航导弹,但定位精度不高无法应用于无人机对目标的精确定位[3]。
针对地图匹配所存在的上述问题,国内外学者从不同角度提出了诸多改进方法,主要集中在改进图像匹配算法上,解决了噪声图像和仿射图像的匹配问题,但没有对底图的应用范围进行改进,无法实现大范围实时定位。
本文利用无人机传感器能同时提供航空影像与POS信息的特点,以及卫星数字地图应用广泛的优势,主要针对目标的二维定位,提出了一种基于图像匹配的无人机目标定位方法,在不引入地面控制点的条件下,利用POS辅助空中三角测量法,与本文制定的搜索策略,通过对实际航摄影像的处理,验证了所建模型的正确性和方法的可行性,完成了大范围内不同目标的自适应定位,对实现快速、精准定位具有十分重要的意义。
1集成传感器定向法
无人机的机载定向定位系统在获取影像的同时,可以直接测定摄站点的三维坐标,以及飞机在摄像瞬间的方位姿态角[4]。POS辅助空中三角测量也称为集成传感器定向法(Integrated Sensor Orientation,ISO),它是通过对POS系统观测数据进行严格的联合数据后处理(动态卡尔曼滤波)直接测定航摄仪的空间位置和姿态,并将其与像点坐标观测值进行联合平差,以整体确定地面目标点的3维空间坐标和6个影像外方位元素,实现少量或无地面控制点的摄影测量区域网平差[5]。
为了研究像点与地面点相对应的数学关系,先建立中心投影的构象方程。设像点a在以像主点为(x0,y0)的像平面坐标o-xyz中的坐标为(x,y),物点A在物方空间坐标系M-XYZ中的地面坐标为(X,Y,Z),投影中心S在物方空间坐标系M-XYZ的地面坐标为(XS,YS,ZS),则在像平面坐标与物空间坐标理论上应满足投影中心-像点-物点位于一条直线的共线条件方程[6]:
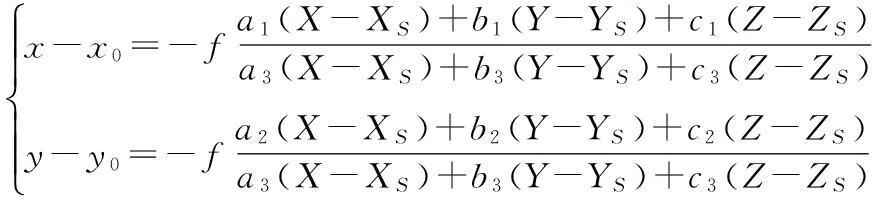
(1)
式中,ai、bi、ci(i=1,2,3)称为方向余弦。可以通过POS的角元素计算出来。
因为像片上一个像点只能组成2个方程,但未知数是3个,必须从不同摄站对同一物体摄影,获得具有一定重叠度的影像对,按照构象方程分别对各个影像的同名像点组成条件方程,由立体相对可得式(2)。

(2)
求解上式即可获得相应物点的三维空间坐标(X,Y,Z)。利用POS辅助光束法区域网平差的误差方程对影像定向参数与像点坐标观测值进行联合平差,从而提高精度。
由于视准轴误差、累积漂移误差、GPS失锁和周跳、以及由像片畸变、地球曲率、大气折光差等误差的存在,无人机ISO精度不高,某型无人机利用ISO定位精度为200 m,无法满足精确定位的需求,所以本文用作粗定位,用以实现在数字卫星地图上找到匹配区域的目的。
2匹配区域搜索方法
为减少匹配时间,尽可能让匹配区域足够小,但还要完全包含航片或视频帧,所以制定如下搜索策略:
由于无人机飞行高度一般在几百米至几千米,对于地面平坦的情况下,航片或视频帧内地物可近似认为处于同一个平面,故根据重叠区域已知坐标,在图片平面内建立直角坐标系推算非重叠区域未知坐标,从而获得航片4个角点坐标,分别为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4),设该型无人机利用ISO定位误差距离为S,如图1所示。

图1 匹配区域示意图
于卫星数字地图上标出4点,以4点为圆心S为半径画圆,连接圆外部切线交于4点,求出4点坐标(x,y),公式如下:
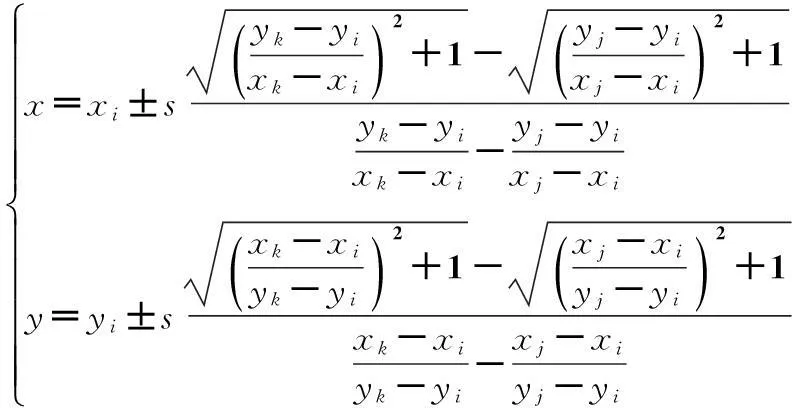
(3)
式中,j,i,k分别取1,2,3;2,3,4;3,4,1;4,1,2。求出的每个(x,y)的解有2个,取在在4点构成四边形外的值即可。标出4点,连线构成封闭图形,该区域即为搜索区域。
3实验验证
利用六旋翼无人机作为实验平台对河北省石家庄市行唐县地区进行了实验,同时分析了本文方法的特点与优势,为工程实践提供了指导帮助。实验主要技术参数如表1所示。计算机配置:处理器为Intel酷睿双核i7第4代,主频为2.5 GHz、2.5 GHz,内存为8 G,操作系统为Win8 64位系统,Matlab R2012与VC++2008 OPENCV编程环境。
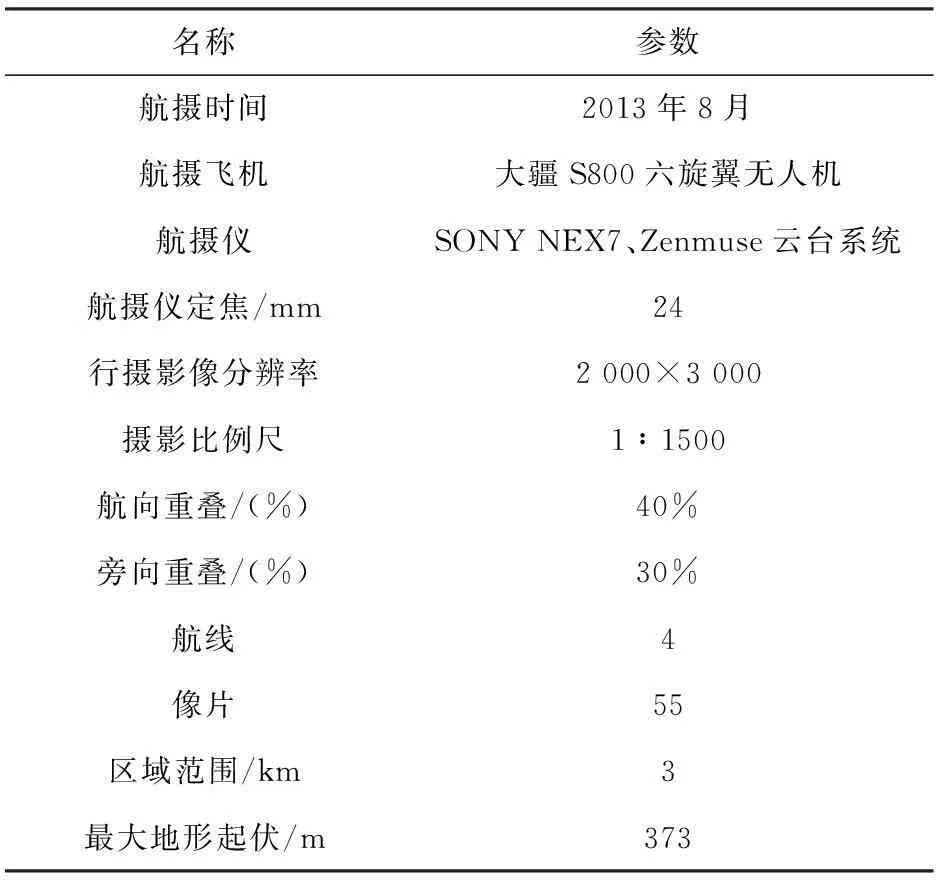
表1 实验影像主要技术参数
取200张航片、谷歌卫星数字地图(如图2所示)与相关POS信息(如表2所示)。本次实验所有的航带重叠率较低,这更能说明本文方法的可行性。

图2 无人机航摄影像与谷歌数字卫星地图

影像X/mY/mZ/mφ/(°)ω/(°)κ/(°)13114.51638.576358.7343.24.587.214114.43738.437362.5233.34.792.1
将2张航片拼接,进而获取同名点,结果如图3(a)。根据ISO确定三维坐标,通过读取txt文件获得外方位元素,数据如表2所示。通过式(2)计算出重叠区域地面点坐标(X,Y,Z),平差后推算左侧航片的4个角点二维坐标A1至A4,于数字卫星地图上找到4点。将ISO定位误差距离按比例尺转换,作为误差半径,通过式(3)计算出匹配区域4个角点坐标B1至B4,结果如表3所示。提取该区域,结果如图3(b),取不同航片实验100次,平均用时2.73 s。

表3 角点坐标值

图3 区域确定结果
最后,将航片与该区域谷歌卫星数字地图匹配,结果如图3(c)所示。读取图内任意点坐标信息,如图3(d)所示,定位全过程用时119.37 s。算法的最终定位误差主要取决于以下几个因素[7]:
① 卫星数字地图本身误差。数字地图本身误差取决于数字正射影像制作误差,不同区域、不同公司定位精度都不相同。对于中国,谷歌卫星地图的定位精度为0.6 m,百度与SOSO精度更高可达到0.2 m。
② 操作手目标点量测误差。一般操作手目标点量测误差0.5 mm,按摄影比例尺规划到实际为7 m。
③ 匹配误差。一般匹配误差不超过整个图像的1.33%。按摄影比例尺规划到实际为2 m。
综合以上3个因素,算法的最终定位误差不超过10 m。ISO定位精度会影响本文方法运行的速度,但不会影响本文方法的定位精度。定位误差结果如图4所示。

图4 定位误差结果
利用天翔500 GPS手持机(误差<1 m)对目标进行实地定位得出坐标信息,将目标的经纬度转换至该坐标下,求取偏差距离,对100个不同点进行求解偏差,结果如图3,最大偏差距离为9.88 m,平均为7.35 m,每个点平均用时75.27 s,文章实验结果证明:
① 针对地图匹配定位方法受底图影响,精度不高、应用范围受限的缺陷,本文结合数字卫星地图的特点,利用ISO粗定位为所有航片或视频帧实时搜索到底图,扩大了地图匹配定位方法的应用范围,同时避免了ISO误差影响,提高了定位精度,较某型无人机利用ISO定位精度200 m提高20倍以上,从真正意义上解决了精确定位问题。
② 为保证定位的实时性,提高定位速度,本文制定了航片或视频帧在数字卫星地图上的搜索策略,减小了匹配范围,提高了匹配速度,进而大幅度改善定位速度,使得实时定位成为可能。
4结束语
提出一种基于POS与卫星地图改进的地图匹配定位方法,利用ISO与卫星地图,制定了搜索策略,主要针对目标进行二维定位。通过仿真与实验验证了本文方法的可行性,即可提高目标定位精度与速度,同时避免了卫星地图更新缓慢与POS系统误差的影响,提高了目标定位精度与速度,是一种有效改进的地图匹配定位方法。
本文算法还存在不足:利用ISO粗定位推算非重叠区域未知坐标时,要求无人机飞行高度较高,地面相对平坦,而无法处理复杂多变情况,对城市高层建筑物的匹配存在误差。这些问题会在后续研究中加以改善。
参考文献
[1]毛昭军,汪德虎.姿态测量/激光测距的无人机目标定位模型[J].火力与指挥控制,2003,28(5):334-337.
[2]SARIPALLI S,MONTGOMERY J F.Vision Based Autonomous Landing of an Unmanned Aerial Vehicle[C]∥Proceeding of IEEE International Conference on Robotics And Automation.May,2005:1 927-1 932.
[3]樊邦奎,段连飞,赵炳爱,等.无人机侦察目标定位技术[M].北京:国防工业出版社,2014:21-29.
[4]鲁恒,李永树.一种基于POS数据的无人机影像自动展绘控制点方法[J].光电工程,2011,38(9):25-29.
[5]袁修孝.POS辅助光束法区域网平差[J].测绘学报,2008,37(3):343-348.
[6]WANG Zhi-zhuo.Principle of Photogrammetry(with Remote Sensing)[M].Wuhan:Press of Wuhan Technical University of Surveying and Mapping,Beijing:Publishing House of Surveying and Mapping,1990.
[7]LEGAT K.Approximate Direct Georeferencing in National Coordinates[J].ISPRS Journal of Photogrammetry & Remote Sensing(S0924-2716),2006,60(44):239-255.
[8]崔焱,王玉林.双站方位时差定位系统精度分析[J].无线电通信技术,2011,37(3):44-46,57.
[9]乐四海,欧新颖,张向征,等.相邻GEO卫星信号干扰分析[J].无线电通信技术,2012,38(3): 9-11.
[10]张俊祥.卫星通信发展展望[J].无线电通信技术,2012,38(4):1-4.
张岩男,(1991—),硕士研究生。主要研究方面:无人机信息传输与处理技术。
李建增男,(1966—),硕士生导师。主要研究方面:控制科学与工程、无人机信息传输与处理技术。
作者简介
基金项目:国家自然科学基金(51307183)
收稿日期:2015-05-05
中图分类号TN957.52;TP751;TP391.41
文献标识码A
文章编号1003-3106(2015)08-0043-04
doi:10.3969/j.issn.1003-3106.2015.08.12
引用格式:张岩,李建增,李德良,等.基于POS与卫星地图改进的地图匹配定位方法[J].无线电工程,2015,45(8):43-46.
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
科学家(2019年3期)2019-08-18
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
知识经济·中国直销(2018年3期)2018-04-12
雷达学报(2017年1期)2017-05-17
科学与财富(2016年28期)2016-10-14