
一种改进的激光光斑中心亚像素定位方法
2015-03-18 03:08王杰飞刘洁瑜
激光技术 2015年4期
王杰飞,刘洁瑜,赵 晗,沈 强
(第二炮兵工程大学控制工程系,西安710025)
引 言
激光具有方向性好、发散度小等特性[1],故被广泛应用于航空航天、武器系统以及光学测量和检测仪器中,激光光斑中心能否准确定位直接决定了测量精度的高低[2]。因此,在平台漂移测量系统中对投射到CCD上的激光光斑中心进行精确定位是保证测量精度的关键与核心。提高平台漂移测量系统的测量精度,可以从硬件和定位算法两方面来提高测量定位的精度[3]。目前,比较常用的激光光斑中心定位算法有Hough变换法、质心法、带阈值的质心法、高斯拟合法、圆拟合法、空间矩法等[4-8],这些算法在检测精度、速率和抗干扰性上各自都存在着一定的不足。质心法要求光斑图像分布比较均匀、图像对称性好,否则会产生较大误差,而且抗干扰能力弱;带阈值的质心法是对质心法的改进,主要是精度有所提高;高斯拟合法虽然精度较高,但存在计算量大、实时性较差的缺点[9]。
基于上述分析,本文中提出了一种改进的高斯拟合算法来提取激光光斑的中心位置。首先对激光光斑图像进行阈值分割提取出有效的激光光斑,然后对激光光斑中心位置进行粗提取,最后对高斯函数进行简化,将3维高斯曲面拟合转化为x和y两个方向上的2维曲线拟合得到激光光斑中心亚像素定位结果,并对拟合结果进行误差补偿。仿真和实验结果均表明,本文中的算法明显优于传统的质心法和带阈值的质心法。
1 阈值分割及中心粗提取
激光光斑图像背景的灰度值一般比较低,且变化较平缓,激光光斑的灰度值一般较高,相对于激光光斑图像背景其灰度值变化较剧烈。一般可通过设定阈值来分割激光光斑图像背景和激光光斑。常用的阈值设定方法有固定阈值法和自适应阈值法。固定阈值法采用单一阈值对图像进行处理,其阈值常通过实验标定来得到,但实验条件与实际应用条件有差别,因此通过实验标定得到的阈值并不是最优的。自适应阈值法根据实际激光光斑图像进行阈值计算,具有很强的灵活性,可以提高激光光斑图像分割性能。故本文中采用自适应阈值法,其计算式可表示为:

式中,V为自适应阈值的计算结果;Ravg为图像灰度平均值;σ为图像灰度的均方差;k为常值,一般取为5~15。若设激光光斑图像为J,大小为m×n,图像在像素点(i,j)的灰度值为 J(i,j),则有:
经实验分析得到在本文中k值取6比较合适,阈值确定后,具体的图像分割方法如下:

由于对激光光斑图像进行阈值分割后除有效的激光光斑像素点外,其余像素点的灰度值均为0,同时结合激光光斑的形状特点,本文中的激光光斑中心粗提取结果可通过比较各行各列的灰度值之和的大小来确定。若用(x0,y0)表示激光光斑中心粗提取结果,则该算法如下式:

2 改进的高斯拟合亚像素定位算法
对于激光光斑而言,其光强分布近似满足高斯分布[10],因此,每个有效像元的灰度值可按高斯函数进行求解,形式如下:

式中,I0表示目标像点在探测器上的总能量;x0,y0是激光光斑的实际中心位置;σx和σy是激光光斑光强分布分别沿x和y方向上的标准差。假设CCD像元对光照具有均匀的强度敏感性,则任一像元上的灰度值可以表示成高斯点分布函数沿该像元边界的积分,即:
另外,根据傅里叶光学可知,高斯点分布函数在x轴和y轴方向可以认为是相互独立的,分别对x和y进行计算[11],因此上式可以改写为:

式中,x1和x2为该像元在x方向上的边界坐标;y1和y2为该像元在y方向上的边界坐标。
为简化计算过程,本文中在此引入傅里叶级数这一概念,其物理意义是把一个比较复杂的周期运动看成是许多不同频率的简谐振动的叠加。若设函数f(x)的周期为2l,且f(x)满足收敛定理的条件,则它的傅里叶级数展开式为:

其中:
可以证明(6)式中的指数函数符合狄利克雷(Dirichlet)充分条件,即满足收敛定理,故对其进行傅里叶级数展开可得:
通过对(7)式的分析可以发现,x,y可分别进行计算,故本文中的思路是计算x时,把(7)式中关于y的积分看作一个常量。另外,在保证精度的同时,为简化计算过程,本文中舍去(10)式中n≥4的级数项,并将该式代入(7)式,令a,于是可以得到x方向拟合函数为:

同理可以得到y方向拟合函数为:
由于激光光斑的像素点个数有限,为提高拟合精度需对灰度信息进行插值处理,插值对激光光斑质心定位的影响是通过增加采样点、降低量化误差来实现的,参考文献[12]中通过对各种插值方法的研究对比,结果表明,线性插值较其它插值方法效果好,且线性插值容易实现、计算量小,插值点数取2~5个即可在一定程度上提高激光光斑中心定位精度,无限制的插值是不必要的。因此本文中采用线性插值方法,且插值点数为5。同时由于激光光斑图像是激光光斑和背景的叠加,为减少背景对激光光斑中心定位的影响,在处理激光光斑时应减去背景灰度值。
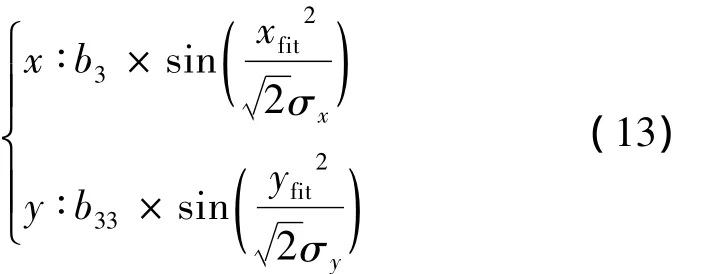
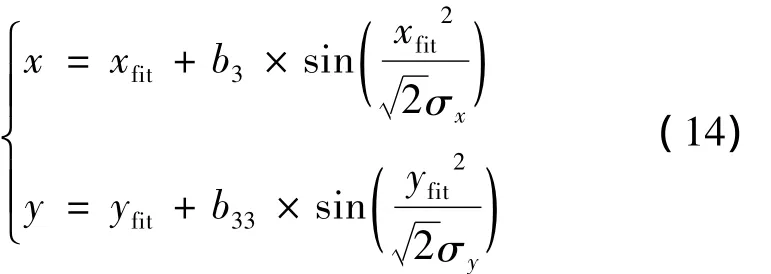
为得到激光光斑中心定位结果,只需对(11)式、(12)式进行求导得到极值点,分别得到x和y方向上的坐标即可。因为本文中采用的拟合函数是对高斯函数的简化得到的,要得到更精确的结果需对舍去的三角函数项进行补偿,若设xfit,yfit为拟合结果,则x方向和y方向的补偿项为:
故最终的激光光斑中心亚像素定位结果为:
3 实验结果及分析
为验证本文中算法的精度,生成一幅人工光斑图像,模拟激光光斑的中心坐标为(128,128),分别利用质心法、带阈值的质心法及本文中的算法计算模拟光斑中心位置,本文中算法结果如图1中的所示,3种算法的具体结果如表1所示。

Fig.1 Simulation of spot and positioning results of the improved algorithm
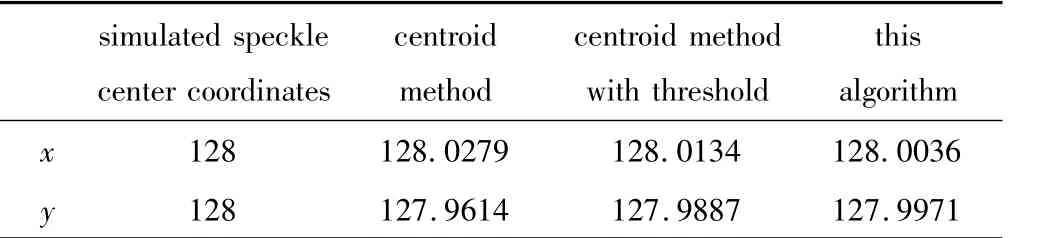
Table 1 Results of simulation spot location/pixel
从表1中可以看出,3种算法对模拟光斑中心均有较好的定位结果,其中本文中算法定位精度要好于质心法和带阈值的质心法1个数量级。为进一步检验本文中的算法,搭建实验系统对其进行测量分析。实验系统由激光器、转台、反射镜面、面阵CCD等组成。采集到的图像像素大小为1024×768。转台每转过0.5°采集1幅图像,共采集19幅图像。对这19幅图像进行处理得到19组激光光斑中心定位数据。图2为实验中采集到1幅图的局部和其中心定位结果。
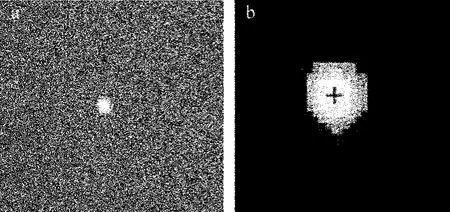
Fig.2 Part of experimental image and positioning results of the improved algorithm
19幅激光光斑图像的激光光斑中心定位具体结果如表2所示。从表2中可以看出,质心法与带阈值的质心法的定位精度为0.1pixel,而本文中算法的定位精度则能达到0.01pixel,明显优于传统的质心法及其改进的带阈值的质心法。同时因为在实验中激光光斑的准确中心无法获得,为对本文中的算法进行全面的评估,本文中在此对上述3种算法的稳定性进行分析,如图3所示。

Table 2 Results of spot location measurement
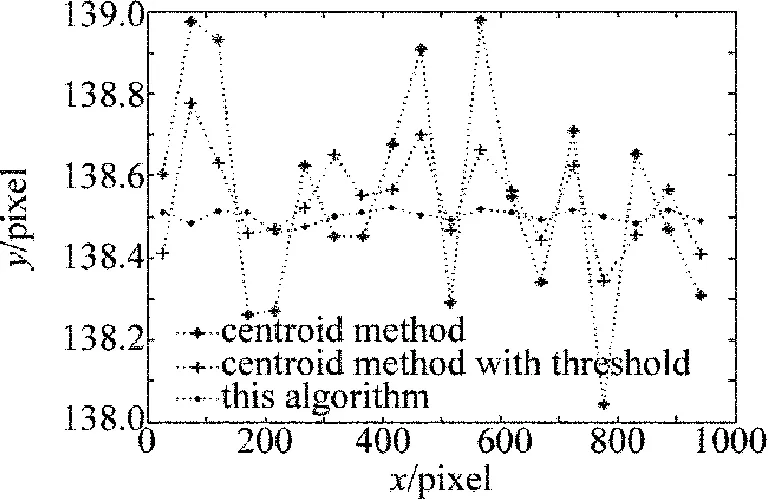
Fig.3 Analysis results of stability
从图3中可以看出,本文中算法的稳定性明显高于质心法和带阈值的质心法,其中质心法的稳定性最差。
4 结论
提出了1种改进的高斯拟合算法来提取激光光斑的中心位置,并通过人工光斑和实测激光光斑进行了验证分析。本文中算法的主要内容是对高斯拟合函数进行傅里叶级数展开,为降低计算复杂度,在保证精度的前提下,取前4项进行近似处理,然后对激光光斑进行x和y两个方向上的曲线拟合。同时为进一步提高激光光斑中心的定位精度,在进行拟合前对激光光斑中心位置进行粗提取、光斑灰度信息进行线性插值等处理,拟合后加入误差补偿项。人工光斑和实测激光光斑的分析结果均表明,该算法的精度能够达到0.01pixel,并且具有较好的算法稳定性,明显优于传统质心法和带阈值的质心法,是一种可行的激光光斑中心亚像素定位方法。
[1] WANG Ch Y,LI J Sh.Detection of laser spot drift[J].Journal of Applied Optics,2007,28(2):205-208(in Chinese).
[2] KONG B,WANG Zh,TAN Y Sh.Algorithm of laser spot detection based on circle fitting[J].Infrared and Laser Engineering,2002,31(3):275-279(in Chinese).
[3] WANG Zh Q,LIU Zh R,ZHAO Y,et al.Precise center location algorithm for laser spot in distortion measuring system[J].Journal of E-lectronic Measurement and Instrument,2011,25(6):485-489(in Chinese).
[4] LIU H L,HOU W,FAN Y L,et al.An improved algorithm of laser spot center location[J].Computer Measurement& Control,2014,22(1):1655-1660(in Chinese).
[5] WANG L L,HU Zh W,JI H X.Laser spot center location algorithm based on Gaussian fitting[J].Journal of Applied Optics,2012,33(5):985-990(in Chinese).
[6] LAN Zh L,YANG X F.Practical improvement of laser spot center location algorithm[J].Computer Engineering,2008,34(6):7-9(in Chinese).
[7] YANG P,XIE L,LIU J L.Zernike moment based high-accuracy sun image centroid algorithm[J].Journal of Astronautics,2011,34(9):1963-1970(in Chinese)
[8] HUANG J P,WANG Y J,SUN H H,et al.Precise position measuring system for laser spots [J].Optics and Precision Engineering,2013,21(4):841-847(in Chinese).
[9] WANG H Y,FEI Zh H,WANG X L.Precise simulation of star spot sand centroid calculation based on Gaussian distribution[J].Optics and Precision Engineering,2009,17(7):1672-1677(in Chinese).
[10] LIEBE C C.Accuracy performance of star trackers-a tutorial[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(2):587-599.
[11] BRENDAN M Q,VALERY T,HENOK M.Determining star-image location:a new sub-pixel interpolation technique to process image centroids[J].Computer Physics Communications,2007,177(9):700-706.
[12] WANG X W,ZHANG Ch H,ZHAO Zh,et al.High accuracy centroid calculation of low SNR star image[J].Infrared Technology,2009,31(6):343-347(in Chinese).
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中国医疗美容(2015年1期)2015-07-12
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
航天器工程(2014年5期)2014-03-11
