
多传感器系统中基于扩展卡尔曼滤波器的在线故障检测*
2015-03-27 07:54郭淑霞
传感器与微系统 2015年6期
郭淑霞,姜 颖,刘 佳
(河北工业大学 计算机系,河北 廊坊065000)
0 引 言
在多传感器系统中,卡尔曼滤波技术取得了一系列研究成果。文献[1]使用扩展卡尔曼滤波(EKF)技术研究了一类非线性系统测量时在有限视界上的不足;文献[2]综述了卡尔曼滤波在机器人视觉上的研究成果,包括机器人定位、导航、跟踪、运动控制、估计和预测等方面;文献[3]使用粒子滤波初估计状态变量,再使用卡尔曼滤波,提出了非线性滤波算法;侯静等人[4]将扩展卡尔曼粒子滤波与“负”信息相融合,得出了似然函数更新计算粒子权重;文献[5]基于四元数卡尔曼滤波观测、状态和方差等方程的组合导航提出了分析四元数卡尔曼滤波组合导航算法。
此外,Nguyen-Duy K 等人[6]在单开开关故障检查中使用矩阵变换器驱动速度控制永磁同步电动机提出了一种新的故障检测方法;Shen Yin 等人[7]基于容错结构的数据驱动的设计,提出了在线容错控制(FTC)系统整合方案;文献[8]基于残差生成器和优化控制提出了适用于飞行器网络化控制的系统在线故障检测算法;文献[9]建立了适用于小型无人直升机偏航控制系统的高效在线故障检测滤波器。
基于以上研究成果及其存在的不足,本文提出了一种基于马尔科可夫预测的适用于多传感器系统的故障检测与诊断机制。该机制基于故障检测信息状态转移矩阵,利用马尔科夫模型预测传感器故障信息,同时拓展了数据包信息字段包括故障类型、节点定位等,当故障成功处理后,传感器节点状态转移至正常状态,并且将故障处理和诊断特征等信息存储到网关或者汇聚节点,以便提高故障检测精度和诊断效率,进一步优化系统资源利用率。
1 多传感器系统扩展卡尔曼滤波模型
设定非线性多传感器系统如公式(1)所示,该系统考虑了系统输入信号¯x、输出信号¯y 和故障阵列ˉf。

当系统中处于稳定态的具有独立性的协同点(u0,v0,t0)对非线性多传感器系统泰勒展开并近似为公式(2)所示


然而,直接使用该非线性多传感器系统模型,会带来3 个问题:1)难以使用多传感器系统拓扑的动态变化;2)传感器节点的内部与外部的各类因素导致的故障对系统性能影响程度不同;3)难以与扩展卡尔曼滤波直接融合。为了解决以上3 个问题,对于不确定的、未知的和多样的因素进行归一化处理,改善该多传感器系统模型的适应能力和自调节能力
设计一个具有k 个输入z 个输出的扩展卡尔曼滤波器,每个输入值用于检测传感器工作状态,每个输出用于为系统提供故障检测决策依据,该扩展卡尔曼滤波器如公式(5)

其中,α 为卡尔曼滤波器扩展特征系数,β 为扩展卡尔曼滤波器在多传感器系统中的稳态系数。
另外,对扩展卡尔曼滤波器第j 个输入端Δ¯xj经归一化、滤波优化后的输出端之间的测量误差为

综上,非线性多传感器系统的扩展卡尔曼滤波器基于系统统计测量的故障检测点规范如下
在地图学中,地图理论主要用于指导地图制作和地图应用,地图数据是地图制作和地图显示的核心要素,地图显示是地图数据和地图内容的空间化表达,而地图应用则是地图学与其他学科连接的重要通道和应用出口(图1).信息时代背景下,众源数据的引入、可视化方法的变革、服务范围的深化等地图学内容的日新月异,传统地图学教学内容面临前所未有的挑战.为适应新时代背景下国家和公众对地图提出的新要求,地图学教学内容应从地图理论的系统化、地图数据的多源化、地图显示的多样化以及地图服务的广泛化等几方面进行调整,以补充完善传统地图学教学内容中的不足.
于是,对于非线性多传感器系统的统计测量稳态,设计如图1 所示的扩展卡尔曼滤波的多传感器故障检测模型,多传感器系统自调节加强模型如图2 所示。

图1 扩展卡尔曼滤波的多传感器故障检测模型Fig 1 Multi-sensor fault detection model based on extended Kalman filtering

图2 自调节加强模型Fig 2 Strengthen self-regulating model
为了验证所提的适用于非线性多传感器系统额扩展卡尔曼滤波器的目标跟踪统计性能,在第3 节设计的实验2中,统计温度测量对比系统值与模型值,结果如图3 所示。可以看出,所提扩展卡尔曼滤波器模型因为具有自调节加强功能,所以,两条曲线非常接近,最大误差小于0.05,最小误差接近0。
2 多传感器在线故障检测

图3 非线性系统扩展卡尔曼滤波器误差分析Fig 3 Error analysis of nonlinear system with extended Kalman filter
为了实现多传感器网络的实时在线故障检测,采用交叉验证方法,在实时在线故障检测过程中,交叉验证与扩展卡尔曼滤波相结合,不仅可以区分随机噪声降低故障率还可以提高多传感器系统的数据融合的统计测量值。因为随机噪声会影响多传感器应用运行状态,所以,需要借助扩展卡尔曼滤波器与交叉验证相结合来提高多传感器数据融合的重构准确性。在多传感器系统数据重构与融合过程中,来自属于故障阵列的多传感器的统计测量值,组合输入到扩展卡尔曼滤波器模型,便于故障检测及其诊断的一致映射。
设定一组无线信号序列ζt0,t0+T={ζt0,…,ζt0+T},其中第j 个元素的信号长度为,于是,该序列长度为设定系统与扩展卡尔曼滤波其模型的统计测量映射参数ζ 为固定值,则非线性多传感器系统的稳态正常工作状态向量τ1满足如式(8)所示关系

该公式描述了系统无故障状态即规模为n 的多传感器系统中故障节点数m 为0。
当系统出现故障即故障阵列不为空,扩展卡尔曼滤波器多输入端τ2具有式(8)所示的关系



因此,在线故障检测算法描述如下

该在线故障检测机制在非线性多传感器系统的节点上的架构设计如图4 所示。
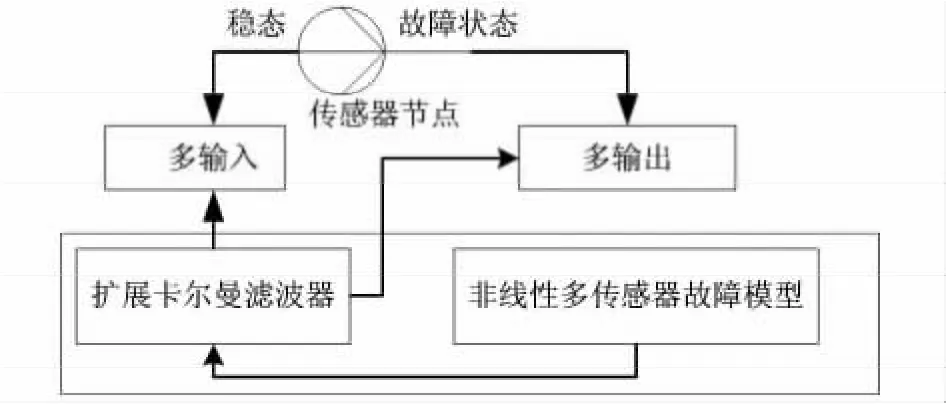
图4 在线故障检测单节点架构Fig 4 Single sensor node architecture of online fault detection
3 实验验证
基于1 节中建立的适用于非线性多传感器系统的扩展卡尔曼滤波模型,设计2 组实验对所提的在线故障检测算法进行性能分析与验证,并与未考虑扩展卡尔曼滤波器的检测算法进行比对。
实验1:在800 m×800 m 的网络拓扑中部署200 个传感器节点Su(0 <u <200),多传感器系统信号重构函数Hn为保持系统的非线性,必须满足关系Hn(δS1,…,δSn)=0。分别假设200 个节点中有10 个并发故障和15 个并发故障条件下,分析所提检测算法与无扩展卡尔曼滤波器的检测算法即传统检测算法的故障报告个数,如图5 所示。从图5中可以看出:随着并发故障数的增大,检测算法的故障报告个数也在增加,但是,所提在线检测算法因为基于扩展卡尔曼滤波器模型多输出的故障阵列,其故障报告个数更接近实际并发故障个数,而且,当总并发故障个数越大即从10 个增加到15 个,发现传统的在线检测算法的误差逐渐增大,而所提在线检测算法依然可以保持较低的误差,报告实时并发故障个数。

图5 故障检测报告对比Fig 5 Comparison of fault detection report
实验2:在第一组实验拓扑中,在200 个传感器节点中设置50 只温度传感器,所提算法在以上传感器上的架构如图4 所示。设定并发故障数为从1~20 之间的随机整数,试验时间为100 s,为了便于分析,设定实际温度从10~0 ℃线性降低,观察图2 中检测算法保障下非线性多传感器系统的性能,分别从平均故障检测概率、在线故障漏检率和实时温度监测值等方面对比分析所提算法与传统算法。其结果如图6 所示。从图6 中看出:所提算法因为在线检测效率和精度高可以有效降低故障发生率,于是平均故障检测概率和在线故障漏检率明显低于传统算法,而且从温度监测值来看,所提算法的值与实际统计值误差较小,性能优于传统算法。

图6 温度传感器在线故障检测性能Fig 6 Online fault detection performance of temperature sensor
4 结束语
针对多传感器系统在实际应用中面临的在线故障严重影响系统性能的问题,本文分析研究多传感器系统自主在线故障检测与诊断机制。主要工作包括:1)根据多传感器系统多输入、多输出信号,建立一种具有自调节加强功能的扩展卡尔曼滤波器的故障分析模型;2)在该模型计算得到的故障阵列基础上提出了多传感器系统在线故障检测算法;3)设计了该算法的传感器实施架构。数学分析与实测结果证明了所提算法高准确度故障报告能力、高效稳定的系统性能保障能力,在实时故障报告数、平均故障检测率、在线故障漏检率和温度测量等方面明显优于传统的故障检测算法。
[1] Hu Jun,Wang Zidong,Gao Huijun,et al.Extended Kalman filtering with stochastic nonlinearities and multiple missing measurements[J].Automatica,2012,48(9):2007-2015.
[2] Chen S Y.Kalman filter for robot vision:A survey[J].IEEE Transactions on Industrial Electronics,2012,59(11):4409-4420.
[3] 夏 楠,邱天爽,李景春,等.一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J].电子学报,2013,41(1):148-152.
[4] 侯 静,景占荣,羊 彦.远距离干扰环境下目标跟踪的扩展卡尔曼粒子滤波算法[J].电子与信息学报,2013,35(7):1587-1592.
[5] 高显忠,侯中喜,王 波,等.四元数卡尔曼滤波组合导航算法性能分析[J].控制理论与应用,2013,30(2):171-177.
[6] Nguyen-Duy K,Liu Tianhua,Chen Der-Fa,et al.Improvement of matrix converter drive reliability by online fault detection and a fault-tolerant switching strategy[J].IEEE Transactions on Industrial Electronics,2012,59(1):244-256.
[7] Shen Yin,Hao Luo,Ding S X.Real-time implementation of faulttolerant control systems with performance optimization[J].IEEE Transactions on Industrial Electronics,2014,61(5):2402-2411.
[8] 王明明,王 青,董朝阳.飞行器网络控制系统在线故障检测算法[J].北京航空航天大学学报,2012,38(6):750-754.
[9] 王 青,王明明,董朝阳.一类降阶故障检测滤波器设计及其在飞行器中的应用[J].宇航学报,2013,34(1):61-68.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
