变电站智能巡检系统的研究
2015-03-27 07:18国网青岛供电公司于海龙刘晓伟李志戈肖文军李旭平
电子世界 2015年21期
国网青岛供电公司 于海龙 刘晓伟 李志戈 肖文军 李旭平
1 引言
变电站日常设备巡视是保证变电站安全运行的一项重要的管理制度。截止目前,常规人工巡视方法由于存在劳动强度大、安全系数低、人工成本高等缺点,智能巡检机器人系统已经在变电站巡视管理中崭露头角[1]。
变电站智能巡检机器人系统,是国网公司为适应智能化变电站及无人值守变电站发展需求,全面提高变电站智能化水平而研制开发的,拥有安全自主产权和发明专利,整体技术水平处于国际领先水平。该系统以智能巡检机器人为核心,整合机器人技术、电力设备非接触检测技术、多传感器融合技术、模式识别技术、导航定位技术以及物联网技术等[2],能够实现变电站全天候、全方位智能巡检和监控,提高正常巡检作业和管理的自动化和智能化水平,为智能化变电站和无人值守变电站提供创新型的技术检测手段和安全保障,更快的推进变电站无人值守的进程。变电站机器人巡视现场如图1所示。

图1 机器人巡视实例
本文以某220kV智能化变电站机器人巡检系统为例,对机器人运行原理、系统功能和巡视路线设计进行研究,采用机器人技术进行巡检,是智能变电站和无人值守变电站巡检技术的发展方向,具有广阔的发展空间和应用前景。
2 机器人巡检系统
变电站设备巡检机器人系统采用分层控制结构,分为上下两层:基站和移动站控制系统层、系统层。变电站巡检机器人主要用于户外变电站代替巡逻人员巡逻检查。机器人可以携带红外热像仪电站设备检测装置[3],可见光CCD等[4],自主和遥控的方式,代替室外高压设备的监测,以检测电力设备的内部热缺陷,外部如机械或电气问题:异物,损伤,发热,漏等,对操作人员诊断电力设备运行和故障事故先兆提供相关数据。机器人系统能够在正确的时间代替人的检查工作,并能生成报表,如机器人不能方便值班时间巡逻人员(如在00:00和03:00)或恶劣的天气条件下,在没有监督人员的前提下,可根据检查的固定路线,并能自动返回出发点。
3 机器人运行的基本原理
机器人依靠前端的磁传感识别事先设计的巡行轨道,通过识别埋设的RFID点来执行停靠位置的各种命令[5],包括转弯、检测、停车、充电、开门等等。通过磁轨道的导航与停靠点的命令组合来完成既定的巡检任务。机器人任务的启动主要有两种方式,一种为定时启动,主要是在机器人调试完毕情况下无需人为操作的自主运行任务。另一种为人为控制启动模式,主要是在有参观要求与特殊紧急情况下的启动方法。

图2 智能巡检机器人结构示意图
机器人充电主要有自动(推荐)与手动(当机器人电量已经不能满足启动时采用),自动充电即让机器人能够采集到充电的RFID点,这样机器人便会执行充电命令,同样如果要实现机器人自动开启充电小屋的门禁也是让机器人采集到开门点的RFID点。所以针对午山站要完成一次人为控制的自动充电即把机器人断电推到离开门停靠点不远的机器人轨道上,然后上电,待后台与机器人通讯正常以后,启动任务。机器人便会首先顺着轨道行进到开门点,执行开门动作,然后进屋充电等等。图2为智能巡检机器人结构示意图。
4 系统功能及巡视路线设计
变电站智能巡检机器人系统分为基站和移动站机器人本体两部分。依据现场工作要求,研制的机器人系统主要系统功能如下:
(1)方便用户对机器人系统进行配置,根据配置定时下发自动规划任务;根据用户配置,自动采集和存储可见光图像和红外图像,并经行分析和处理,动态显示机器人当前采集的可见光图像和红外图像如图3所示。
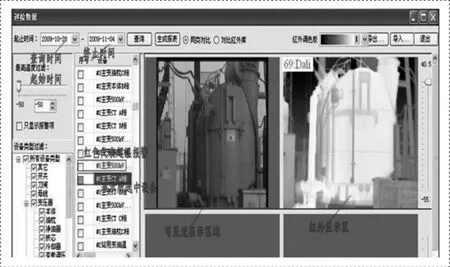
图3 机器人巡检数据采集界面
(2)手动控制机器人的运动和机器人云台的动作,实时显示机器人当前的方位和运动状态,显示机器人的当前位置和速度的数据信息如图4所示。

图4 机器人操控系统平台
(3)显示机器人的电源状态,并进行分析和异常报警,显示机器人外围传感器的信号状态,并进行报警,查询机器人现场采集的历史数据,并进行对比分析。
智能巡检机器人采用磁导航方式,该导航方式具有抗干扰能力强、可靠性高、不受雨雪天气影响等优点,是目前室外移动机器人最可靠和成熟的导航方式。
定位点为机器人在全局路径规划中提供定位和任务信息,包括位置坐标、设备间隔、任务内容等。根据变电站具体设备分布图,本变电站机器人巡检路线图如图5所示。

图5 机器人巡视路线图
5 结论
采用机器人技术进行变电站巡检,既具有人工巡检的灵活性、智能性,同时也克服了人工巡检存在的一些缺陷和不足,更适应智能变电站和无人值守变电站发展的实际需求,具有巨大的优越性。本文阐述了机器人及智能巡检系统的基本原理,并结合某220kV智能化变电站重点介绍了智能巡检系统的功能和巡视路线设计,充分体现了变电站智能巡检系统在变电站日常巡视管理中的广阔发展空间和应用前景。
[1]鲁守银,苏建军.机器人在变电站巡检中的应用[J].机器人技术与应用,2007,25(1):485-493.
[2]矫德余.基于嵌入式系统的智能巡检机器人研制[D].中国石油大学(华东),2010.
[3]肖鹏,王海鹏,等.变电站智能巡检机器人云台控制系统设计[J].制造业自动化,2007,5(1):33-36.
[4]李云红,李军华,李培.红外热成像技术在电厂的应用[J].现代电子技术,2008,31(6):180-184.
[5]王建元,陈永辉.基于图论的电力巡检机器人智能寻迹方案[J].电力系统自动化,2011,35(19):85-88.
猜你喜欢
军事文摘(2022年19期)2022-10-18
印刷工业(2020年4期)2020-10-27
电子制作(2018年8期)2018-06-26
中国交通信息化(2017年4期)2017-06-06
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年5期)2016-05-17
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
河南电力(2015年5期)2015-06-08