
星载GPS接收机的可见星预测方法
2015-03-28 01:54朱淑珍谢卓辰姜泉江尹增山
电子设计工程 2015年16期
朱淑珍,谢卓辰,姜泉江,尹增山
(1.中国科学院上海微系统与信息技术研究所上海200050;2.上海微小卫星工程中心上海201203)
GPS接收机定位时,需要捕获至少4颗可见GPS卫星。目前,共有32颗在轨GPS卫星。捕获过程中包括时域、频域、伪随机噪声码PRN三维捕获。星载GPS接收具有高动态特点,普通接收机对高动态场景中时域、频域二维的快速捕获技术[1-2]可应用于星载接收机,但由于星载GPS接收机处于一定轨道高度上,GPS星座覆盖特点与地面接收机不同,因此地面接收机基于仰角计算的第三维搜索技术[3]不适用于星载GPS接收机。本文研究如何预测星载GPS接收机的可见GPS卫星,安排对GPS星座中不同卫星的搜索顺序,提高星载GPS接收机的捕获速度。
当接收机内保存了有效的GPS历书和接收机概略位置时,可以解算出GPS卫星对接收机的仰角,参照周围环境对仰角的限制,计算出该时刻可见GPS卫星。人们研究了历书的有效龄期[4]、历书预报位置的精度[5]、仰角方位角预报精度[6]等内容,验证了这一方法可行且有效。但这些研究中取仰角大于的GPS卫星为可见卫星,这种简单的判据方式只适用于地面接收机,不适合空间特点复杂、定位需求不同的星载GPS接收机。文献[7]中给出了星载GPS接收机可见GPS卫星的判断方法,从立体几何的角度分析并给出判据公式,使用时不够方便明了。本文根据星载GPS接收机所处的空间特点推导出对轨道高度分段讨论的仰角预测可见星的判据,这一方法简单实用,适用于不同低轨轨道、不同航天任务的星载GPS接收机。
1 星载接收机的空间特点
单颗GPS卫星对星载GPS接收机的空间覆盖情况如图1所示,leo1、leo2和leo3是高度依次递增的3条低轨卫星轨道,直线l1和l1是GPS天线覆盖范围的边界,直线l3和l4是GPS卫星与地球表面的切线,该GPS卫星对处在阴影区域内的星载GPS接收机可见。α是GPS卫星天线对地张角,约为30°。
从空间几何角度分析可知,星载GPS接收机除了可以接收到头顶GPS卫星(仰角为正)信号外,还可以收到负仰角处的卫星信号。文献[7]中通过对接收信号功率的分析证明了负接收仰角仍能保证GPS信号的可靠接收。因此,在较低的卫星轨道上(如轨道leo1),星载GPS接收机可以接收到比地面更多的GPS卫星信号。但由于GPS卫星发射天线对地球形成有限的覆盖角,导致在较高的轨道(如leo3)上,在某些轨道位置该GPS卫星对接收机不可见。总结得出:1)随着轨道高度增加,可见GPS卫星个数总体呈减少趋势;2)在某段轨道高度范围内,可能会因为负仰角处可见GPS卫星个数增加而使总体可见个数稍有增加[7-8]。
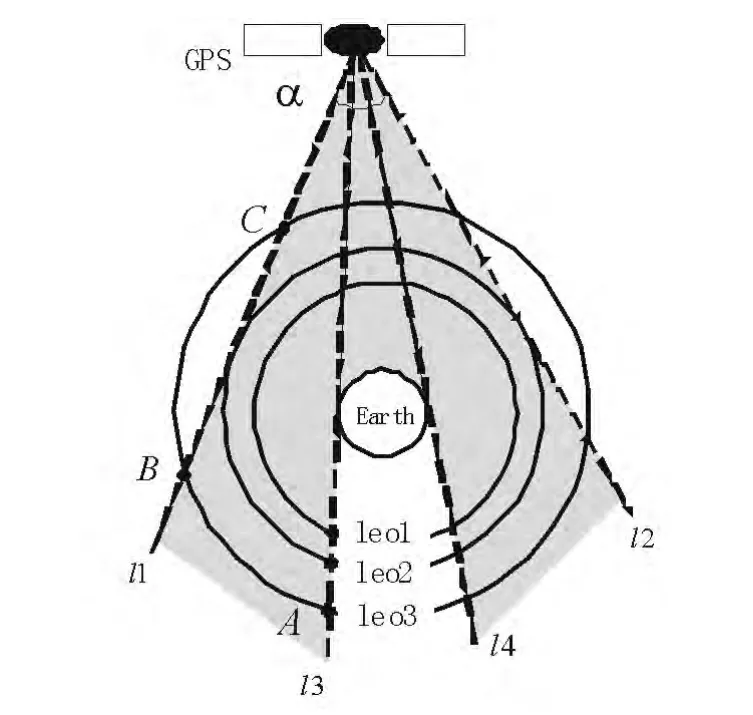
图1 单颗GPS卫星对星载GPS接收机的覆盖Fig.1 Single GPS satellite coverage for spaceborne GPS receiver
2 可见星判据及卫星搜索顺序
当接收机内保存有上一次计算的接收机位置及有效的历书时,可以根据当前时间计算出GPS卫星的位置和速度[10],再根据接收机位置进一步计算出卫星的仰角、几何距离和多普勒频移。因此,此时不仅可以计算出各颗GPS卫星的可见性,还可以估算出各颗可见卫星的二维搜索范围,大大减小搜索范围。
由某时刻接收机位置和GPS卫星坐标可计算出该卫星对接收机的仰角e,取值范围为[-90°,90°],计算公式为:

2.1 星载GPS接收机仰角预测可见星判据
图1中低轨轨道leo1比较低,不受GPS天线覆盖角影响,被地球挡住部分之外的轨道皆为该GPS卫星可视区;leo3轨道较高,受GPS天线覆盖角影响,可视区域被分为3段。所以,可见性判据应该根据轨道高度分段讨论。临界轨道即leo2所在轨道,根据几何关系求得临界轨道高度Hleo为:

其中,α是GPS天线张角,rGPS是GPS卫星的轨道半径,rearth是地球的平均赤道半径。
当hleo<Hleo时,空间覆盖情况如轨道leo1所示,可视区为一段弧形轨道,点A是GPS卫星与地球表面的切线与低轨轨道的一个交点,该点处GPS卫星对接收机的俯仰角eA=-,此时可见判据为

当hleo≥Hleo时,空间覆盖如轨道leo3所示,可视区是三段弧形轨道,点B和点C是GPS卫星天线覆盖范围边界与低轨轨道的两个交点,此时可见判据为
其中,
当GPS卫星对接收机的仰角在临界值eA,eB和eC附近时容易出现预测错误。这是由历书外推误差、仰角计算误差等引起的。为保证更好的预测正确率,可以适当缩小判据范围,这将以牺牲召回率为代价。假设以Δe(Δe>0)缩小判据范围,则判据公式调整为
2.2 卫星搜索顺序
电离层是高出地表面50~1 000 km的大气层,在GPS定位测量的误差中,电离层误差的影响最大。对地面接收机,从天顶到地平,电离层引起的测距误差,可从5 m到150 m[9]。因此,地面接收机的对卫星搜索顺序的优化策略是:对高仰角卫星的搜索优先于低仰角卫星[10]。
对星载GPS接收机而言,用户卫星任务不同,卫星搜索顺序安排不同。当可见卫星多于4颗时,如果用户卫星用于定位、定轨和定姿,为提高用户卫星精度,优先选择仰角较高的可见GPS卫星;如果用户卫星用于对大气层和电离层等内容的观测统计研究,例如掩星技术[11],GPS信号穿过的大气层和电离层越多越好,此时优先选择仰角较低的可见GPS卫星。因此,本文提出的仰角预测可见星方法可以为不同航天任务的星载GPS接收机选择满足不同定位需求的可见GPS卫星。
3 仿真验证
3.1 建立仿真环境
文中基于MATLAB和STK进行仿真验证。下载GPS星座的SEM历书,在STK中根据SEM历书建立GPS星座,并给每颗卫星添加一个遥感器(sensor),设置其类型为简单圆锥(Simple Conic),并一直指向地心,所有遥感器的圆锥角度设置为15°(对应GPS卫星的天线覆盖角为30°)。本文基于2014年8月13日的SEM历书进行STK仿真,在该历书参考时刻实际可用GPS卫星共30颗。在该场景中添加一颗低轨卫星LEO,定义其离心率为0,轨道倾角为30°,近地点角度和升交点赤经、真近点角都为0,轨道高度设置在了100~2 000 km范围内。设置仿真起始时间为历书参考时间(13 Aug 2014 16:44:48.000),仿真结束时间为14 Aug 2014 16:44:48.000,仿真步长为60 s。
STK仿真过程中将每个仿真时刻低轨卫星LEO与GPS卫星的可见关系导出到MATLAB中,作为验证可见星判决方法的对比参照数据。并保存每个仿真时刻低轨卫星LEO的位置坐标,作为星载GPS接收机的定位输出值。在MATLAB中,根据GPS接收机的位置和GPS历书外推,取Δe为0,利用本文推导的判据公式计算不同仿真时刻星载GPS接收机与GPS卫星的可见关系,并与STK中导出的可见关系对比。
3.2 仿真结果
首先对单个轨道高度的预测结果进行分析。设置低轨轨道高度为1 000 km,统计每个仿真时刻预测正确和预测错误的个数,以及预测可见卫星的正确率和召回率。其中,预测正确指预测结果与STK中导出的可见情况一致,否则为预测错误;预测正确率指预测正确的可见卫星个数占总预测可见个数的百分比,预测召回率指预测正确的可见卫星个数占STK中可见卫星个数的百分比。仿真结果如图2所示,可以看到,对32颗GPS卫星,大部分仿真时刻可正确预测30~32颗GPS卫星,有0~2颗卫星预测错误,少数时刻预测错误个数会多达3~4颗,预测正确率和召回率一直处于90%~100%之间,大部分时间高达95%~100%。
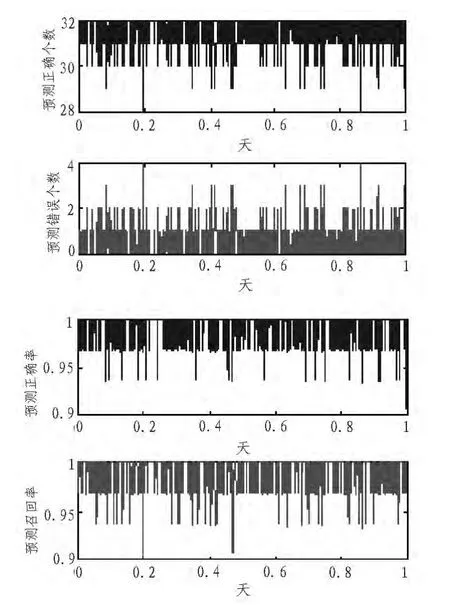
图2 1 000 km高度时预测可见星仿真结果Fig.2 Simulation results of visible satellites prediction on 1 000 km altitude
考虑到不同轨道高度可见GPS卫星个数不同,在100 km到2 000 km的不同轨道高度上进行仿真。每次仿真24小时,统计预测的可见GPS卫星中预测正确的个数、预测的可见GPS卫星个数和STK中可见GPS卫星个数的平均值,并计算预测结果的正确率和召回率。
仿真结果如图3所示。可以看到随轨道增加,STK仿真结果中可见GPS卫星个数减少,符合本文的理论分析。图中预测可见正确个数、预测可见个数和实际可见个数这3条曲线十分贴合,计算预测的正确率和召回率大约在93%~100%之间。仿真结果表明本文提出的判决方法能很好地预测实际可见GPS卫星的分布情况,平均预测误差大约为0.5颗GPS卫星。并且,预测结果与低轨卫星的轨道高度无关,在实际可见GPS卫星个数较少的环境中也能保持93%以上的预测正确率和召回率。因此,本文提出的对轨道高度分段讨论的仰角预测可见星的方法适用于任何低轨轨道高度、不同仰角观测要求的星载GPS接收机。
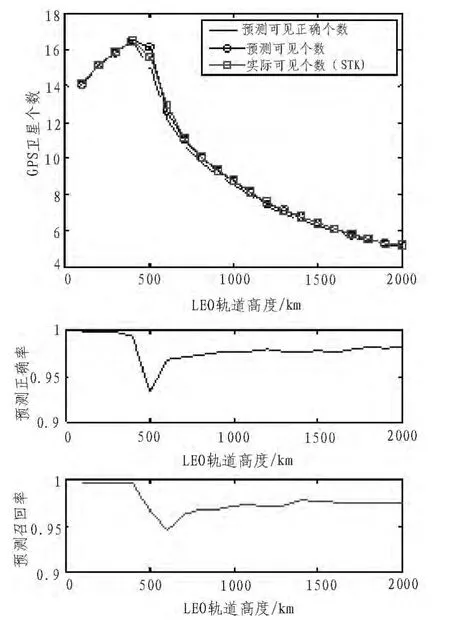
图3 不同轨道高度下预测可见卫星仿真结果Fig.3 Simulation results of visible satellites prediction on different altitudes
作为对比,对直接取仰角大于0°为可见GPS卫星的这种判据方法进行仿真。仿真结果如图4所示,可以看到,轨道高度增高时,预测可见卫星个数不变,一直保持在10~12之间,未能体现实际可见卫星个数逐渐减少的趋势。在500 km以下时,预测正确率为100%,随轨道高度越高,正确率逐渐下降,当轨道高度为2 000 km时,正确率下降至35%;而预测召回率从80%开始随轨道高度增高下降至65%左右。因此,如果采用这种简单的判决方法,当轨道高度高于500 km时,由于预测正确率变化范围较大,只能取正仰角中最高的4颗GPS卫星定位,对定位精度影响很大。在任何低轨轨道范围内,这种判决方法都不能应用于低仰角观测任务的星载GPS接收机。
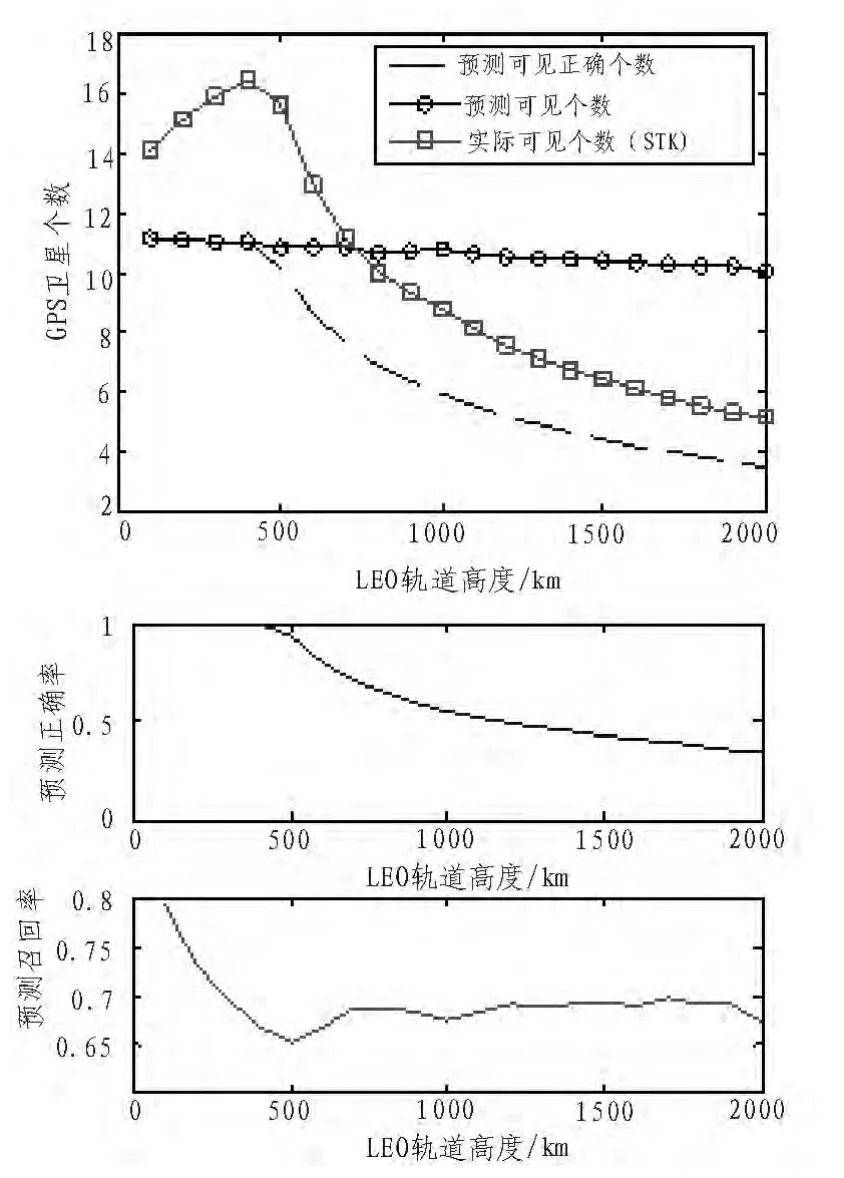
图4 不同轨道高度下取仰角大于0°为可见卫星仿真结果Fig.4 Simulation results of method judging the satellite whose elevation is greater than 0°as visible on different altitudes
对比这两种判决方式可知,本文提出的星载GPS接收机仰角预测可见卫星方法的平均预测正确率和召回率都在93%以上,预测效果明显优于地面接收机直接取天顶GPS卫星为可见的判决方法,观测结果不受轨道高度影响,而且可用于不同航天任务的星载GPS接收机。
4 结论
GPS接收机在低轨卫星等航天器上有广泛的应用。为了准确地预测可见GPS卫星,以便于快速捕获,免于漫天搜星,本文根据GPS星座的空间覆盖特点,提出了一种对轨道高度分段讨论的基于仰角的可见GPS卫星判决方法,并通过MATLAB和STK软件对它进行了仿真,仿真结果表明这个判决方法的平均预测正确率和召回率都大于93%,可用于不同低轨轨道高度、不同航天任务的星载GPS接收机。
[1] 李继忠,李巍.GPS信号快速捕获方案研究[J].航空电子技术,2006(2):1-5.LI Ji-zhong,LI Wei.Research on fast acquisition of GPS signal[J].Avionics Technology,2006(2):1-5.
[2] 于海亮,胡小平,唐康华.惯性信息辅助高动态接收机捕获问题的研究[J].航天控制,2008(5):50-54.YU Hai-liang,HU Xiao-ping,TANG Kang-hua.Acquisition issues of the high dynamic GPS receivers aided by inertial information[J].Aerospace Control,2008(5):50-54.
[3] 袁海义,周浚哲,郝永平,等.GPS卫星可见性预测与接收机的快速定位[J].成组技术与生产现代化,2014(1):45-49.YUAN Hai-yi,ZHOU JUN-zhe,HAO Yong-ping,et al.GPS satellites visibility forecast and rapid positioning of receivers[J].Group Technology&Production Modernization,2014(1):45-49.
[4] 王梦丽,陈华明,王飞雪.GPS历书数据的有效龄期[J].遥测遥控,2007(3):31-35.WANG Meng-li,CHEN Hua-ming,WANG Fei-xue.Effective age of GPS almanac data[J].Journal of Telemetry,Tracking,and Command,2007(3):31-35.
[5] 周善石,王解先.GPS广播星历与历书的精度比较[J].工程勘察,2006(9):69-70,74,49.ZHOU Shan-shi,WANG Jie-xian.The precision of GPS broadcast ephemeris and ephemeris comparison[J].Engineering Surrey,2006(9):69-70,74,49.
[6] 余小游,覃曼丽,吴问其,等.基于SDP4模型的导航卫星仰角及方位角预报[J].全球定位系统,2014(3):44-48.YU Xiao-you,QIN Man-li,WU Wen-qi,et al.Navigation satellite elevation and azimuth prediction based on SDP4 model[J].GNSS World of China,2014(3):44-48.
[7] 刘会杰,张乃通.GPS星座的空间覆盖特性研究[J].高技术通讯,1999(12):1-5.LIU Hui-jie,ZHANG Nai-tong.Research of Space Coverage Property for GPS Constellation[J].Qualcomm Technology,1999(12):1-5.
[8] 田八林,袁建平,岳晓奎,等.基于STK的GPS空间覆盖特性仿真分析[J].计算机仿真,2008,25(6):46-49.TIAN Ba-lin,YUAN Jian-ping,YUE Xiao-kui,et al.Analysis and simulation of coverage performance of GPS based on STK[J].The Computer Simulation,2008,25(6):46-49.
[9] 谢世杰,韩明锋.论电离层对GPS定位的影响[J].测绘工程,2000(1):9-15.XIE Shi-jie,HAN Ming-feng.On effects of ionosphere on GPS positioning[J].Engineering of Surverying and Mapping,2000(1):9-15.
[10] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[11] 杜晓勇,毛节泰.GPS-LEO掩星探测现状和展望[J].高原气象,2008(4):918-931.DU Xiao-yong,MAO Jie-tai.Status and outlook of GPSLEO occultation sounding[J].Plateau Meteorology,2008(4):918-931.
猜你喜欢
散文选刊·下半月(2022年4期)2022-04-22
初中生世界·九年级(2020年2期)2020-04-10
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
西夏学(2018年1期)2018-04-29
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
科技视界(2016年15期)2016-06-30
全球定位系统(2015年4期)2015-02-28
红领巾·成长(2009年8期)2009-01-12
