
一种基于PIR的对瞄测距定位方法研究
2015-03-29 02:11刘前进
激光与红外 2015年5期
侯 爽,杨 卫,刘前进
(1.中北大学 电子测试技术国家重点实验室,山西 太原030051;2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原030051)
1 引言
热释电红外(PIR)传感器以非接触形式检测环境中红外辐射的变化,对人体运动具有非常高的敏感度,并且具有适用范围广、隐蔽性强和受环境光线干扰小等优点,因此基于PIR定位与轨迹获取技术受到关注[1]。目前,目标检测与轨迹跟踪是智能监控、高级人/机接口、运动分析和行为理解等涉及的共性关键技术,在灾害救助、安防以及医疗监护等有着广泛的应用价值[2]。但是,利用热释电红外(PIR)传感器进行定位的研究较少。热释电信号峰峰值时间差法测距[3],是对PIR的深层次应用的初步探索。基于此,提出了一种两个静态红外传感器对瞄情况下进行目标的定位研究,对峰峰值时间差法测距的误差进行修正。这种方法首先把两个红外传感器至于同一直线、同一高度上进行对瞄,利用多功能数据采集卡采集信号数据,从而对红外传感器用于人体精确定位的可行性进行研究。
2 基本原理
2.1 峰峰值时间差法原理
利用热释电传感器实现目标距离测定,就必须分析其输出的热电信号中所携带的目标距离信息。通过对多种条件下所采集的信号的分析,用于探测的热释电传感器在有目标通过其探测视场时,其输出信号的最大幅值受外界诸多因素影响,测距误差非常大。基于此,就提出了利用输出信号的峰峰值时间差法实现运动目标的测距。
根据运动目标通过红外传感器探测视区时产生信号的过程以及传感器的构造特点,所形成的探测视场之间盲区的距离随探测视场纵深距离的增加而增加,当目标从距传感器不同距离处通过时,目标经过两探测敏感元间盲区的距离不同,在目标运动速度相对恒定情形下,目标从不同距离处穿越两个视区的时间T将不同。目标距传感器较近时,通过盲区的距离较短,T较小,目标距传感器较远时,通过盲区的距离变长,T较大。利用这种时间上的差别可实现目标距离的测定。
2.2 峰峰值时间差法测距的不足及改进
表1为目标在10 m处以不同角度方向运动时距离测量结果,通过对目标在同一距离下以不同方向运动时所采集的大量信号后发现,以不同角度运动时峰峰值时间差法测距所得到的测量统计结果误差较大,有的甚至严重偏离真实值。

表1 目标在10 m处以不同角度方向运动时距离测量结果
为了分析峰峰值时间差法测距误差较大的原因,故采集了目标穿过红外传感器探测视区时原始波形,表2为目标在10 m处以不同角度方向运动时信号波形的实验结果。
从表2可以看出,目标运动的角度不同导致输出信号在正负半轴两段时间差呈现明显不对称的特征,具体表现随着运动方向的角度不断增大,这种不对称特征也越来越明显。

表2 目标在10 m处以不同角度方向运动时信号的实验结果
由表2可知,由于目标运动的角度不同导致输出信号在正负半轴两段时间差呈现明显不对称,正是基于PIR测量信号的不确定性,提出了对瞄修正原理,提高峰峰值时间差法测距的精度。建立了如图1所示的2个传感器节点组成的对瞄实验场景。首先把两个红外传感器至于同一直线、同一高度上进行对瞄,透镜轴线具地面高度70 cm,两个红外传感器间距离30 m,以5 m为间隔采集数据。

图1 对瞄实验场景示意图
2.3 对瞄情况下测距修正原理
人员目标垂直穿过探测视场的峰峰值时间差为Δt0,斜切穿过的峰峰值时间差为Δt1。以大量重复实验为基础,建立时间差数值数据样本模型。在样本中,从垂直所测的峰峰值时间差中挑选出测距误差较小的时间差Δt0,再从斜切所测的峰峰值时间差中挑选出相对应位置处穿过探测视场的时间差Δt1,然后采用近线性的方式与均值法进行修正:
(a)对于单个静态PIR,将Δt1与Δt0的比例系数,即Δt1/Δt0,若比值大于1,则将Δt1代入测距修正公式d=d1×Δt0/Δt1,求出修正距离d,d1为同一位置处利用Δt0测得的距离。
(b)对于对瞄方式下的静态PIR,通过测量同一目标,得到距离d1、d2,根据两个节点的通讯与信息融合,进行距离的平均,求得平均值d=(d1+Ld2)/2。
3 实验系统
3.1 硬件总体设计
基于PIR的对瞄测距定位方法实验系统由两个节点组成,图2所示为实验系统的单节点结构示意图,由PIR传感器、信号调理模块、数据采集模块、电源模块组成。传感器选取muRata IRA-E700型双元热释电传感器,其具有高灵敏度和极佳的信噪比,对外部噪声具有抗干扰能力。热释电输出的信号经信号调理模块进行放大、滤波等预处理经过A/D转换交给数据采集模块处理。数据采集模块选用NI公司的USB 6229进行数据采集,该采集卡具有32路模拟输入,4路模拟输出,48路数字I/O口,32位计数器。模块专门针对移动应用或空间有限的应用而设计。即插即用的安装最大程度地降低了配置和设置时间,同时它能直接与螺丝端子相连,从而削减了成本并简化了信号的连接。每个M系列DAQ设备均包含NI LabVIEW SignalExpress LE,使用户无需编程即可快速采集、分析并显示数据。
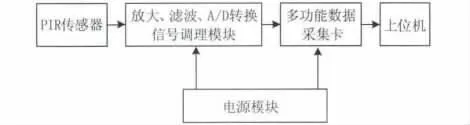
图2 实验系统的单节点示意图
3.2 实验数据软件算法设计
热释电输出的信号经过A/D转换由多功能数据采集卡采集,将数据上传至上位机,经LabVIEW软件算出峰峰值时间差和目标距节点距离,根据对瞄情况下的修正原理,得出目标距节点的最终距离。基于Labview软件算法流程图如图3所示。
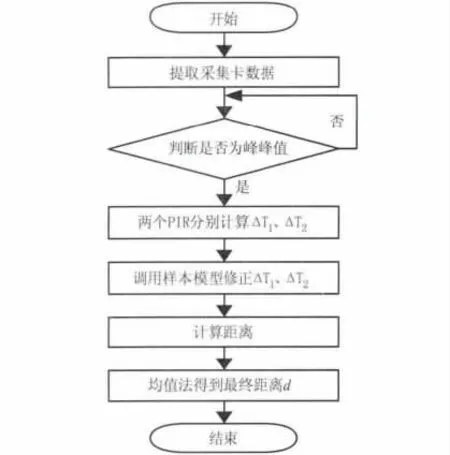
图3 软件算法流程图
4 实验结果及分析
目标(人体)以1.1 m/s匀速进入传感器的感测区域,目标沿途中的10 m、15 m、10 m处垂直和斜切穿过,表3分别为目标垂直和斜切穿过时两个PIR的多次测量的实验结果,表4分别为对瞄后对所测距离的修正结果。

表3 目标垂直和斜切多次测量的实验结果

表4 对瞄后对所测距离的修正结果
从表3和表4测距统计结果,不难看出,对瞄后实现运动目标距离的测量相较仅用信号峰峰值时间差Δt实现的目标测距误差得到了极大的提高,进而也说明利用对瞄后的峰峰值时间差法测距是正确的和可行的。
5 结论
从实验结果可以看出,基于PIR的对瞄测距定位方法提高了峰峰值时间差法的定位精度,使误差缩小到允许范围之内。本文从使用热释电传感器的原理入手,阐述了对瞄情况下进行目标的定位修正原理,并进行了实验验证。本文方法为静态热释电传感器测距提供了一种新思路。
实际应用中可能存在以下问题:首先,较易受环境影响;其次,目标做变速或曲线运动时使用该方法误差较大。这些问题的解决,有待于进一步研究。
[1] SHEN Baihua,LUO Xiaomu,WANG Guoli.An approach for motion detecting and localizationusing pyroelectric infrared sensor[J].Journal of Optoelectronics·Laser,2010,21(9):1351-1353.(in Chinese)申柏华,罗晓牧,王国利.运动检测与定位的热释电红外传感新方法[J].光电子·激光,2010,21(9):1351-1353.
[2] XIAO Jia,YANG Bo.Target localization based on pyroelectric infrared sensing technology[J].Infrared,2011,32(2):17-22.(in Chinese)肖佳,杨波.基于热释电红外传感技术的目标定位研究[J].红外,2011,32(2):17-22.
[3] YANG Wei,LI Bo,SUN Qiao,et al.Research on time difference method for distance measuring based on pyroelectric infrared sensing technology[J].Transducer and Microsystem Technologies,2013,32(4):37-40.(in Chinese)杨卫,李波,孙乔,等.基于热释电红外传感技术测距的时间差法研究[J].传感器与微系统,2013,32(4):37-40.
[4]SUN Qiao,YANG Wei,ZHANG Wendong,WANG Zebing.Research on time difference method for distance measuring based on pyroelectric infrared sensing technology[J].Journal of Optoelectronics·Laser,2013,24(12):2400-2403.(in Chinese)孙乔,杨卫,张文栋,王泽兵.动态热释电传感器网络目标跟踪技术研究[J].光电子·激光,2013,24(12):2400-2403.
[5] WEI Lijun,TANG Dongmei,XIAO Liaoliang.Design and analysis of weak signal processing circuit based on pyroelectric infrared sensor[J].Instrument Technique and Sensor,2013,7:89-91.(in Chinese)魏丽君,唐冬梅,肖辽亮.基于热释电红外传感器微弱信号处理电路的设计与分析[J].仪表技术与传感器,2013,7:89-91.
[6] ZHANG Jiayi.Design of preamplifiers for pyroelectric infrared sensor and application[J].Guangxi Communication Technology,2010,3:24-26.(in Chinese)张佳一.热释电红外传感器放大电路的设计及其应用[J].广西通信技术,2010,3:24-26.
[7] CHENG Weidong,DONG Yonggui.Detection of human body motion features using pyroelectric infrared sensor[J].Chinese Journal of Scientific Instrument,2008,29(5):1021-1024.(in Chinese)程卫东,董永贵.利用热释电红外传感器探测人体运动特征[J].仪器仪表学报,2008,29(5):1021-1024.
[8] XU Wei,YANG Wei.Research on detection method of infrared sensor array[J].Transducer and Microsystem Technologies,2009,28(9):16-18.(in Chinese)徐微,杨卫.一种红外传感器阵列探测方法的研究[J].传感器与微系统,2009,28(9):16-18.
[9] WU Shunwei,ZHU Lina,ZHU Lei,et al.Study on arithmeticof relative position based on pyroelectronic infrared sensor[J].Journal of Shandong Agricultural University:Natural Science Edition,2006,37(3):449-452.(in Chinese)吴顺伟,朱丽娜,朱磊,等.基于热释电传感器的位置相关算法研究[J].山东农业大学学报:自然科学版,2006,37(3):449-452.
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
科学(2020年3期)2020-01-06
少年文艺·开心阅读作文(2019年5期)2019-05-28
山东工业技术(2017年23期)2017-11-28
少年文艺·开心阅读作文(2017年10期)2017-10-26
演艺科技(2017年8期)2017-09-25
电子制作(2017年7期)2017-06-05
少年文艺·开心阅读作文(2016年10期)2016-09-10
少年文艺·开心阅读作文(2016年10期)2016-09-10
科技与创新(2015年17期)2015-09-11
