随动控制部件检测平台设计及模拟负载分析
2015-04-10 05:09曹鹏彬周卓洋于宝成肖敏
武汉工程大学学报 2015年4期
曹鹏彬,周卓洋,于宝成,肖敏*
1.武汉工程大学机电工程学院,湖北 武汉 430205;2.武汉工程大学计算机科学与工程学院,湖北 武汉 430205;3.湖北省智能焊接装备工程技术研发中心,湖北 武汉 430205
随动控制部件检测平台设计及模拟负载分析
曹鹏彬1,周卓洋1,于宝成2,3,肖敏1*
1.武汉工程大学机电工程学院,湖北 武汉 430205;2.武汉工程大学计算机科学与工程学院,湖北 武汉 430205;3.湖北省智能焊接装备工程技术研发中心,湖北 武汉 430205
针对传统检测方式在检测光电雷达随动控制部件时使用和管理的不便,提出随动控制部件检测平台的软、硬件设计方案,并对光电雷达传感部件的模拟负载进行设计.此外,针对实际应用中光电雷达对俯仰、方位机构直流电机的性能要求,设计飞轮负载.利用ADAMS建立俯仰、方位机构的动力学模型,验证飞轮尺寸设计的合理性;利用MATLAB/Simulink建立单闭环直流电机控制系统,并基于Adams和MATLAB进行联合仿真.仿真结果显示,飞轮能在较短响应时间内由初始位置稳定地接近期望偏角.建立的动力学和控制系统模型能够准确反映随动控制部件模拟负载的工作过程,满足设计需求.
光电雷达随动控制部件;检测平台;模拟负载;联合仿真
0 引言
作为光电雷达上的核心部件,随动控制部件为光电雷达的精确跟踪、搜索提供了重要保证,因此其各项性能检测至关重要[1].随动控制部件由大量电路板和接插件组成,故障发生率高,是光电雷达出厂和检修时的重要检测对象.随动控制部件的性能检测是指在特定环境下对电子部件进行运行速度与精度、电机的控制反馈能力,以及自检、信息记录等功能的测试.传统的检测方法使用标准设备搭接对电子部件进行手动检测,需要配置多种规格和型号的测量仪器对各种信号、波形和电参数进行检测分析,数据量多、检测条件复杂,在使用管理上非常不便,效率较低,而且无法实现自动地完整性能参数测试.
当前,计算机技术的快速发展直接促进了机械系统动态仿真技术被越来越多地应用到机电设备的设计和仿真研究之中[2-3].联合仿真手段能使研究人员在短期内研制出仿真模型,能根据设计需求快速修改设计.本文针对光电雷达随动控制部件传统检测方法存在的弊端,提出了随动控制部件检测平台的设计方案,包括硬件方案和检测平台的模拟负载机械结构方案.另外,采用Adams验证了模拟负载的机械性能,采用MATLAB/Simulink对直流电机控制系统进行了分析.
1 检测平台的设计方案
1.1 光电雷达组件简介
光电雷达主要由气源部件、校准部件、电源部件、传感部件、随动控制部件组成.其中,传感部件由物镜、视频信号处理机构、扫描机构(包括俯仰框架、方位框架及消旋机构),光电雷达组件连接如图1所示.
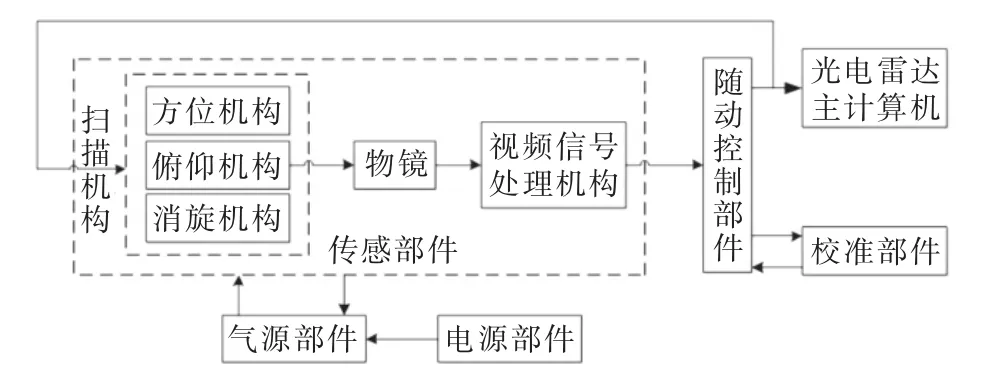
图1 光电雷达组成框图Fig.1 Structure diagram of photoelectric radar
光电雷达组件中各部分的作用如下:气源部件用于对敏感元件的制冷;校准部件用于光电雷达的校准;电源用于产生所有的电源电压;物镜用于接收调制红外线发射,将光信号转换成电信号;视频信号处理机构用于将输入的视频信号进行放大和处理;扫描机构用于查看给定搜索区、搜索目标;随动控制部件用于处理光学机械部件输入信息,与上位机进行通讯,并依据上位机的指令,产生控制信号,保证光电雷达自检状态的正常工作.
1.2 硬件设计
根据检测要求,检测平台应该能够模拟光电雷达中的主计算机和传感部件,并对随动控制部件发送指令进行闭环调试,使其性能满足要求.需要检测的项目包括:大区搜索、小区搜索、目标指示、截获跟踪、垂直工作状态、光圈变化、角度信息显示以及模拟信号输入等.
依据检测要求需要设计模拟负载作为传感部件的替代机构,其目的是执行随动控制部件电机输出信号和反馈角度信息.由于俯仰、方位机构使用的是直流力矩电机,启动力矩分别不大于0.0225N·m和0.042 2 N·m,因此需要分别为其设计负载,同时俯仰、方位负载转动惯量应该能够调整.由于消旋机构和物镜中的光圈机构使用的是步进电机,不存在调整参数问题,因此无需设计负载.
由上述要求,提出了如图2所示的检测平台硬件设计方案.检测平台由工控机和模拟负载组成,具备性能检测、故障诊断、数据处理功能.
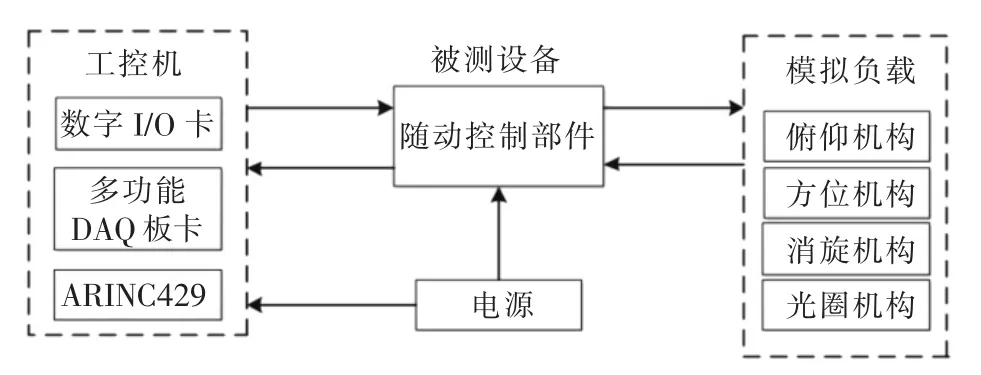
图2 硬件设计方案Fig.2 Hardware design
工控机中装有ARINC429、数字I/O卡、多功能DAQ板卡三块数据采集卡.其中,ARINC429用于发送控制信号和接收反馈信号;数字I/O卡用于I/O口信号监测;多功能DAQ板卡作为适配器实现对被测设备各类信号的调理.模拟负载包含俯仰机构、方位机构、消旋机构、光圈机构,分别模拟光电雷达中对应的机构.
在对随动控制部件进行整体检测时,检测过程大致可以分为控制信号检测和工作状态检测.前者主要检测较为独立的开关量控制信号和频率脉冲信号,后者主要检测与具体工作状态有关的控制信号和脉冲频率信号.
1.3 软件设计
检测平台软件主要基于LabVIEW的编程平台实现,大致可以分为控制信号检测、工作状态检测和数据处理三个部分.
控制信号检测部分包括随动控制部件与光电雷达主计算机之间双极性串行码、脉冲频率信号、光圈控制信息的检测等.
工作状态检测部分包括目标指示工作状态、大区搜索工作状态、小区搜索工作状态和截获跟踪状态的检测等.
数据处理部分包括每次检测工作结束后对检测结果进行制表打印工作.
2 模拟负载机械结构设计
为了模拟传感部件中的扫描机构和物镜的运动状态设计了模拟负载,其机械结构如图3所示.模拟负载包括光圈机构、俯仰机构、方位机构、消旋机构,后三者均配有光电角度传感器检测电机参数并传递信号,需要注明的是,光圈机构在物镜中是由两个开关实现,这里设计两个U型光耦作为位置传感器来输出2个TTL信号.

图3 模拟负载组成结构Fig.3 Structure of simulation load
如前所述,需要为俯仰、方位机构设计负载.为了方便调整负载转动惯量,这里设计飞轮机构作为模拟负载.飞轮两侧由轴承座作为支撑,其尺寸示意如图4所示.
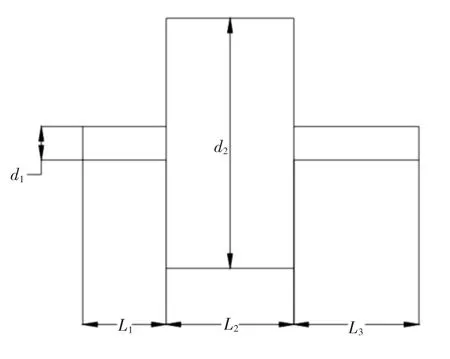
图4 飞轮机构尺寸示意图Fig.4 Schemes of flywheels
俯仰、方位机构均使用永磁直流力矩电动机,电机最大空载转速为119.6 rad/s.电机轴和飞轮材料选用304钢,密度为7 930 kg/m3,电机轴转动惯量经计算为J电机轴=5.104×10-6kg·m2.
飞轮转动过程中的转动惯量计算公式如下:
其中,J飞轮为飞轮转动惯量,mi为L1、L2、L3各部分质量,d1,d2如图4所示,分别为飞轮轴和飞轮轮盘直径.
由启动力矩和转动惯量的关系得式(2):
其中T为启动力矩,T1为惯性力矩,T2为摩擦力矩,ε为角加速度,ω为最大转速,t为到达最大转速所需时间.
设计要求俯仰、方位机构启动力矩分别不大于0.022 5 N·m和0.042 2 N·m,假定飞轮轮盘直径为d2,由于飞轮两侧采用滚珠轴承座支撑摩擦力矩T2大小可以忽略.由式(1)和式(2)可得俯仰、方位飞轮转动惯量分别约为1.83×10-4kg·m2和3.477×10-4kg·m2,俯仰、方位飞轮圆盘直径为60 mm,圆盘厚度为14.3 mm和30.7 mm.
3 Adams与MATLAB的联合仿真
Adams能够对复杂的机械系统进行运动学、静力学以及动力学分析,MATLAB/Simulink可以方便的建立控制系统模型,通过Adams内的Controls模块便可实现和MATLAB/Simulink的协同仿真[4].
基于以上软件的特点,首先采用Pro/e进行三维建模,然后导入Adams后完成模拟负载俯仰、方位机构的动态仿真模型,并且利用Adams/Controls生成被控制模块,最后利用MATLAB/Simulink建立直流电机控制系统模型,设置仿真参数,即可实现Adams与MATLAB之间的联合仿真[5].
3.1 模拟负载动力学模型的建立
将在Pro/e中建立的模拟负载俯仰、方位机构三维模型导入Adams.首先对模型进行简化.由于主要研究飞轮的运动情况,因此作为力矩输出的电机和作为检测仪器的光电角度传感器可以简化.简化模型后,编辑各个零件的材质、转动惯量和质量等相关属性,并将驱动和约束添加至相应的机构之中.如图5所示.
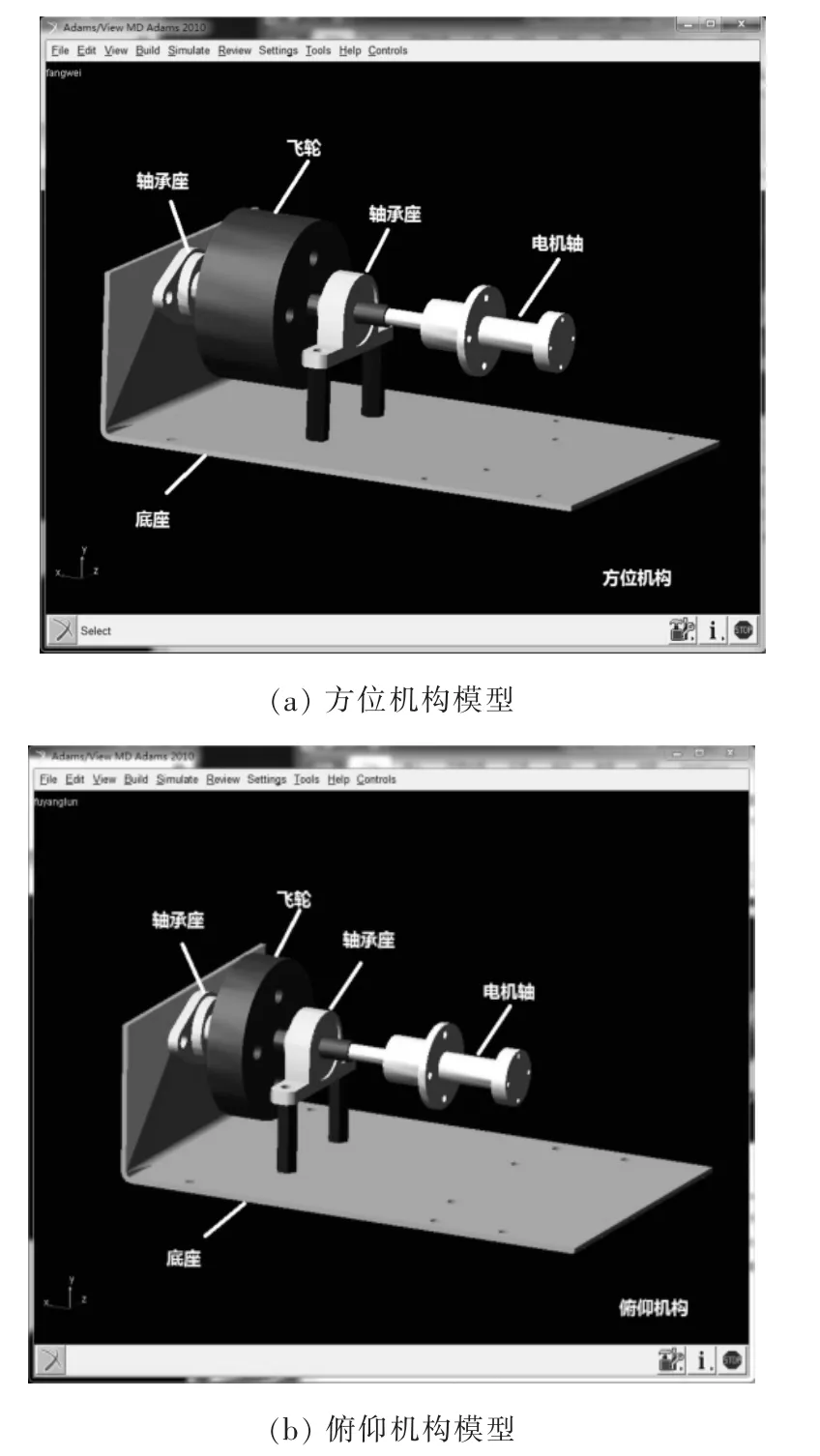
图5 定义约束后的机械模型Fig.5 Mechanic model by define the constraints
根据设计要求,方位、俯仰机构启动力矩分别不大于0.042 2 N·m和0.022 5 N·m,因此在Adams中为电机轴转矩分别添加step函数,使转矩在1 s内增加到给定最大值,从而分别对方位机构和俯仰机构进行仿真实验,验证在加装飞轮负载之后转速能否在给定启动力矩的初始条件下达到理想状态,得到如图6和图7的仿真曲线.
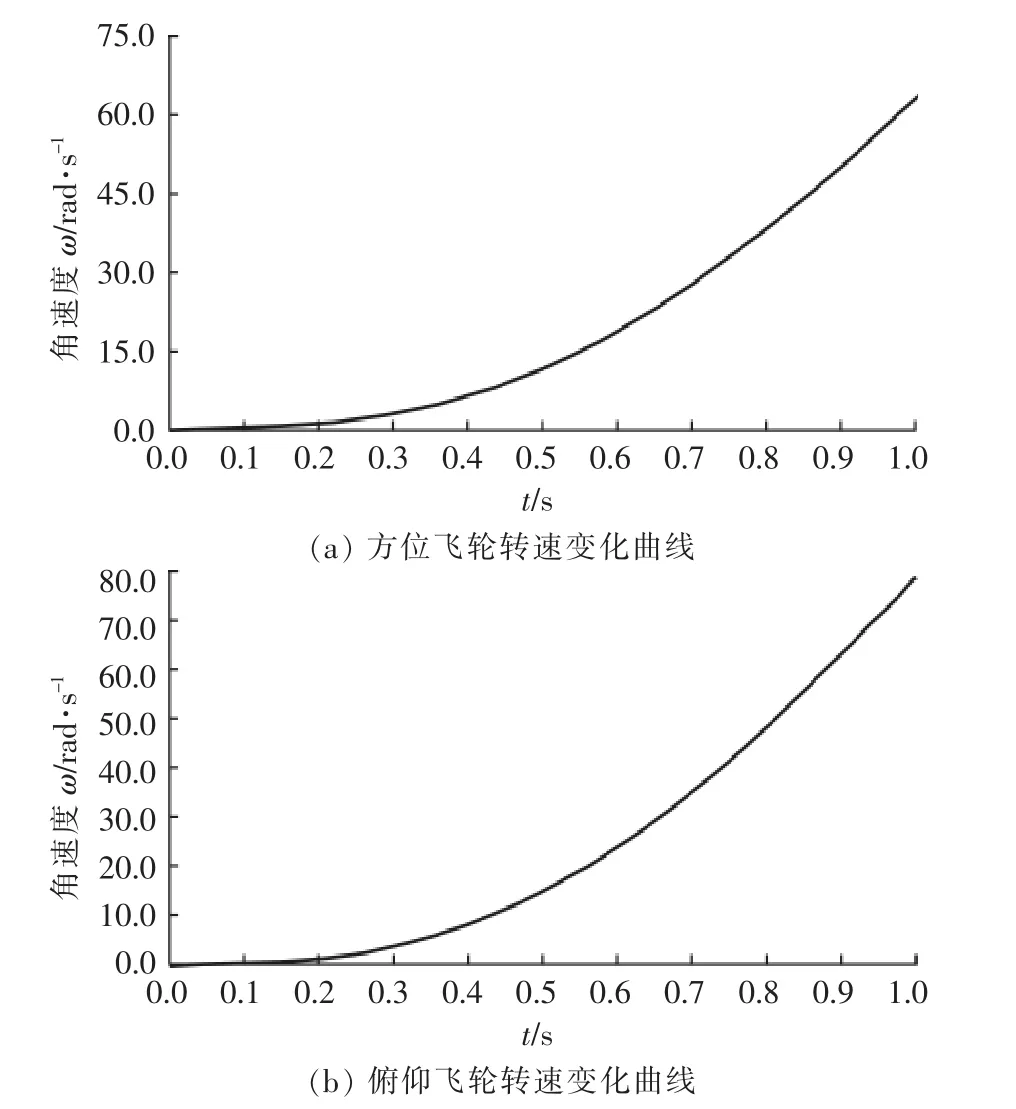
图6 飞轮转速变化曲线Fig.6 Angular velocity of the model

图7 转矩变化曲线Fig.7 Torque of the model

3.2 检测平台的直流电机控制系统模型
检测平台的控制系统中,直流电机是将电信号转变成机械运动的关键部件.当速度指令通过随动控制部件内部的控制器时,控制器将数字信号转换为驱动直流电机的脉冲信号,来控制模拟负载中的电机工作,与电机相连的光电角度传感器将速度信息反馈给控制系统,形成闭环控制,如图8所示.
根据直流电机工作原理,可得电机的传递函数如图9所示.图9中V为工作电压;R、I和L分别为电路中的电阻、电流和电感;T1为电机输出转矩,T2为摩擦扭矩;K1和K2分别为电机转矩系数和电动势系数;J为总转动惯量,ω为电机轴角速度.

图8 直流电机控制系统框图Fig.8 Block diagram of the control system
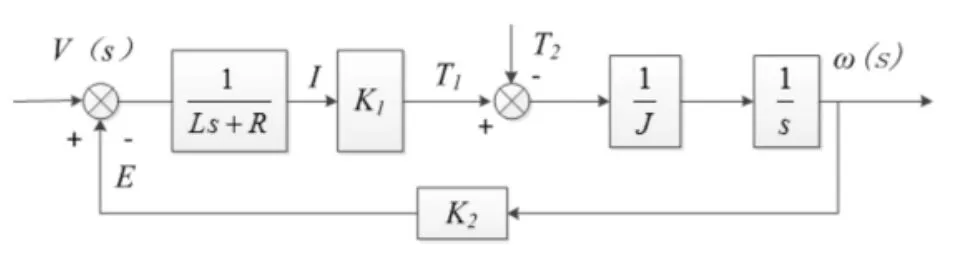
图9 直流电机传递函数框图Fig.9 Block diagram of the control system transfer function
在确定Adams中的输入和输出后,通过Adams/Control模块将系统的控制参数导入至MATLAB/Simulink模块中,并在simulink中建立如图10所示的控制驱动模型.该模型通过改变电机模型的输出力矩,完成控制Adams中模型的运动.其中,定义飞轮偏转信号,以飞轮偏角位移为输出反馈,最终实现飞轮偏角位置跟踪.
3.1节在Adams中建立了模拟负载动力学模型,本节完成了直流电机控制系统模型的设计.根据上文研究内容,直流电机控制系统模型的输出力矩的确定可通过Adams和Simulink联合仿真来实现.电机输出力矩作为控制电机转至期望偏角的控制参数,需要进行重复验证,通过对比仿真数据和实测数据,使仿真模型更接近于实际模型.首先根据实际需求定义系统转角数值,之后基于仿真实验结果不断修改控制参数,直到控制系统模响应达到目标需求,在进行以上步骤之后,最终使控制系统模型的仿真结果与实测结果接近,因此可以确定动态仿真模型的正确性.将期望偏角设为0.2 rad,仿真时间设置为2 s得到如图11所示相关仿真结果.
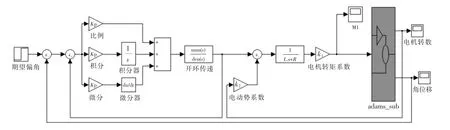
图10 直流电机控制系统模型Fig.10 Control system mode
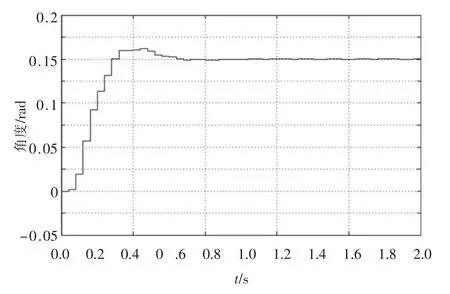
图11 飞轮角度变化曲线Fig.11 Angle of the model
通过联合仿真分析可看出,直流电机带动的飞轮能在较短响应时间内使角度偏移量由初始水平位置快速上升,在0.4 s时处于最高值,随后稳定在0.16 rad,即稳定在接近给定的期望偏角0.2 rad处.由此可以看出直流电机控制系统实现了位置的快速、精确控制.
4 结语
随动控制部件是光电雷达的核心部件,其接口信号包括了大量的开关量控制信号、频率脉冲信号以及符合特定格式的编码信号,十分复杂.同时由于随动控制部件的保密性,造成了整体性能测试的困难.本文在对随动控制部件及光电雷达研究的基础上,提出了基于机械系统动态仿真技术的随动控制部件检测平台方案.通过Adams和MATLAB建立模拟负载俯仰、方位机构的机械模型和直流电机控制系统模型,实现了联合仿真,并且由仿真结果验证了模型的正确性为后续优化提供了依据.
下一步将实际搭建检测平台,开展光电雷达随动控制部件的性能监测工作.
致谢
感谢武汉工程大学研究生教育创新基金项目和湖北省教育厅科学技术研究项目提供资金支持.
[1]郑国锋,于劲松,刘浩.基于PXI总线的光学雷达自动测试系统研制[J].计算机测量与控制,2010,18(5):1095-1102.
ZHENG Guo-feng,YU Jin-song,LIU Hao.Design of automatic test system for optic radar based on PXI BUS virtual instrument[J].Computer Measurement and Control,2010,18(5):1095-1102.(in Chinese)
[2]郑黎明,黄剑波.基于Adams和Simulink的太阳跟踪器联合仿真[J].光学精密工程,2014,22(5):1212-1218.
ZHENG Li-ming,HUANG Jian-bo.Co-simuliation of solar tracker based on ADAMS and Simulink[J].Optics and Precision Engineering,2014,22(5):1212-1218.(in Chinese)
[3]岳敏,陈武山,黄娟.光电式接近开关动作距离智能检测系统的研制[J].现代制造工程,2014(9):122-125.
YUE Min,CHENG Wu-shan,HUANG Juan.Development of intelligent detection system for operation distance of photoelectric proximity switch[J].Modern ManufacturingEngineering,2014(9):122-125.(inChinese)
[4]马如奇,赫双晖,郑伟峰.基于MATLAB与Adams的机械臂联合仿真研究[J].机械设计与制造,2010(4):93-95.
MA Ru-qi,HAO Shuang-hui,ZHENG Wei-feng.Research on coordinated simulation of robot arm based on MATLAB and ADAMS[J].Machinery Design&Manufacture,2010(4):93-95.(in Chinese)
[5]邹丽娟.基于MATLAB/Simulink的测量雷达伺服系统的仿真方法[J].现代雷达,2004,26(8):64-67.
ZOU Li-juan.Simulation method of servo of instru-mentation radar with Matlab/Simulink[J].Modern radar,2004,26(8):64-67.(in Chinese)
Design of testing platform for control unit and analysis of simulated load
CAO Peng-bin1,ZHOU Zhuo-yang1,YU Bao-cheng2,3,XIAO Min1,*
1.School of Mechanical and Electhical Engineering,Wuhan Institute of Technology,Wuhan 430205,China;2.School of Computer Science and Engineering,Wuhan Institute of Technology,Wuhan 430205,China;3.Hubei Province intelligent welding equipment engineering technology research center,Wuhan 430205,China
Aimed at the inconvenient of usage and management in traditional control unit testing methods,a testing platform design for the control unit was proposed,and the simulated load of sensing component of photovoltaic radar was designed.Firstly,considering the performance requirements of optoelectronic radar direct-current motor,and the flywheels were designed.Meanwhile,the dynamics models of pitch and azimuth mechanism were established by using Adams,and the reasonability of the design was verified.Finally,the control system for the direct-current motor was constructed based on single close-loop by using MATLAB/Simulink,and the corresponding co-simulation was completed by using Adams and MATLAB.The co-simulation results demonstrate that the angle of flywheel increases from the initial horizontal position to the desired angle in short time,which shows that the dynamics model and the control system model are correct,meeting the design requirements.
the control unit of photovoltaic radar;testing platform;simulated load;co-simulation
TP206
A
10.3969/j.issn.1674-2869.2015.04.013
1674-2869(2015)04-0059-06
本文编辑:陈小平
2015-04-15
武汉工程大学研究生教育创新基金项目(CX2013075);湖北省教育厅科学技术研究项目(D20141502)
曹鹏彬(1974-),女,湖北武汉人,副教授,博士.研究方向:智能机器人,机电系统智能监测与控制.*通信联系人
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
幼儿园(2021年12期)2021-11-06
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
电子制作(2017年1期)2017-05-17
中国自行车(2017年11期)2017-04-04
电子制作(2016年1期)2016-11-07
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06