基于加速踏板行程的再生制动控制策略研究*
2015-04-12 05:08刘夏红董爱道
汽车工程 2015年7期
林 程,刘夏红,董爱道
(北京理工大学,电动车辆国家工程实验室,北京 100081)
2015139
基于加速踏板行程的再生制动控制策略研究*
林 程,刘夏红,董爱道
(北京理工大学,电动车辆国家工程实验室,北京 100081)
针对纯电动汽车,提出了基于加速踏板行程的再生制动控制策略。当加速踏板行程超过一定门限值时,利用模糊控制算法计算出电机再生制动转矩,模拟发动机倒拖制动过程;建立电机和电池等模型,以加速踏板行程信号为输入条件,对上述控制策略和无发动机倒拖制动的控制策略进行dSPACE硬件在环对比仿真。结果显示,采用提出的控制策略后,电机转矩能较好地跟随驾驶员的操作需求,发动机倒拖制动能回收一定的能量。
再生制动;加速踏板行程;模糊控制;dSPACE硬件在环仿真
前言
电动汽车和内燃机车辆最大的区别在于动力源由内燃机变为电机,电机不仅能够工作在驱动状态,也能工作在再生制动状态,回收一部分车辆动能并延长续驶里程。关于再生制动的已有研究大都采用操纵制动踏板作为触发并控制电机再生制动转矩的方式[1-3],对基于加速踏板定义的再生制动的研究相对较少,本文中将针对这一问题进行深入研究。
传统内燃机车辆驾驶员松开加速踏板时,车辆会受到来自内燃机的制动力,即发动机倒拖制动。为模拟与传统车辆类似的驾驶感觉,并满足驾驶员在城市工况下松开加速踏板时减速的意愿,本文中提出基于加速踏板输入的再生制动控制策略,在保证良好驾驶感觉的同时,回收一定制动能量。
1 模糊控制器设计
发动机倒拖制动转矩主要来自于发动机的机械损失,而影响发动机机械损失的因素很多,除转速、负荷、润滑油品质和冷却水温等使用因素外,缸内压力、气缸尺寸与数目和大气状态等结构设计参数及环境因素也会影响机械效率[4];但机械效率无法用解析方法准确地求出,即使有一些经验公式,也不可靠;而模糊控制可以在一定程度上应对这种不确定性。因此,本文中利用模糊控制针对驾驶员放松加速踏板的工况,模拟发动机倒拖制动状态。
1.1 模糊控制器的输入/输出变量
以加速踏板行程偏移量e(A)=A0-AP和加速度踏板行程变化率dAP/dt作为模糊控制器输入,以电机再生制动转矩变化率w作为输出,数学表达式见式(1),原理如图1所示。
w=fuzzy(e(A),dAp/dt)
(1)
式中:AP为加速踏板行程;A0为进入再生制动状态的加速踏板行程门限值。dAP/dt大于0表示踩下加速踏板,小于0表示松开加速踏板,一定程度上反映了驾驶员的加速需求。
1.2 模糊变量的论域及其隶属函数
隶属度函数曲线形状越尖的模糊子集,其分辨率和灵敏度越高;相反,隶属度函数曲线形状越平缓,控制特性和稳定性越好。因此,本文中在选择模糊变量隶属度函数时,为达到控制精度高且稳定性好的控制效果,在误差较大的区域采用低分辨率模糊集,在误差较小的区域选用较高分辨率的模糊集[5]。
(1) 把加速踏板行程偏移量e(A)和加速踏板行程变化率dAP/dt论域都分为6挡:{0,1,2,3,4,5},描述其语言值的模糊子集为{0,VS,S,M,B,VB},隶属度函数如图2所示。
(2) 把电机再生制动转矩变化率w论域分为13个等级:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊子集为{NB,NM,NS,0,PS,PM,PB},其隶属度函数如图3所示。
1.3 控制规则
根据实际驾驶经验,本文中模糊控制规则语言为:加速踏板行程小于门限值越多,加速踏板行程变化率绝对值越大,则电机再生制动转矩越大。控制规则如表1所示。
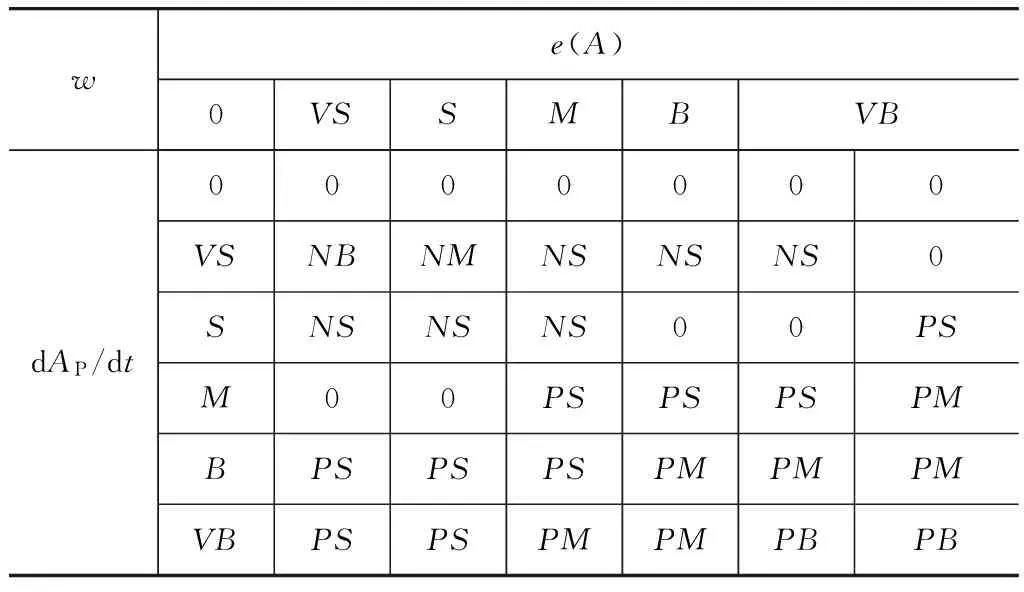
表1 模糊控制器控制规则
根据上述规则,在MATLAB中建立模糊控制器,反模糊化采用重心法,输出结果如图4所示。
2 模型建立
2.1 基于模糊控制器的电机模型
考虑到发动机倒拖转矩占总发动机功率的10%~30%,为防止制动量太大,保证良好的驾驶感觉,把电机再生制动转矩控制在发动机总转矩的30%以内。电机再生制动转矩设置为
Tm-reg(t)=T0+wt
(2)
式中T0为初始时刻的电机转矩,N·m。
2.2 无模拟发动机倒拖制动的电机模型[6]
图5为驾驶员意图解释曲面。由图可见,电机转矩由加速踏板行程和电机转速共同决定,即
(3)
式中:n和nN分别为电机转速和额定转速,r/min;Tm和TN分别为电机转矩和额定转矩,N·m;PN为电机额定功率,kW。
电机转速n与车速vt(km/h)关系为
(4)
式中:ig为变速器传动比;i0为主减速器传动比;r为车轮滚动半径,m。
2.3 电池模型[7]
2.3.1 单体电池模型
本文中采用等效单体模型分析电池的充放电过程,将单体等效为一个由开路电压源和内阻串联而成的电路进行充放电,如图6所示。
由基尔霍夫定理得
Ev=Ut+Rii
(5)
PL=iUt
(6)
由式(5)和式(6)得
(7)
式中:Ev为开路电压,V;Ut为负载电压,V;Ri和RL分别为电池内阻和负载电阻,;PL为负载功率,kW;i为母线电流,A。
2.3.2 电池荷电状态计算
瞬时理论荷电状态为
(8)
(9)
式中:SOCinitial为初始时刻的荷电状态;C为电池最大容量,A·h;Cuse为电池组放出(Cuse>0)或充入(Cuse<0)的电量,C;ηc为电池组充放电效率;充电时电流i为负值,放电时为正值。
3 dSPACE硬件在环试验
硬件在环(hardware-in-the-loop)仿真,又称半实物仿真,其优势在于可以模拟实际物理信号,缩短相关产品的开发周期,降低试验成本[8]。
图7为硬件在环仿真控制系统,包括Simulink仿真平台、dSPACE(DSl006处理器)、ControlDesk软件和驾驶室仿真(加速踏板输入)4个部分,驾驶室负责产生实时加速踏板信号,上位机中的ControlDesk软件下载Simulink模型至dSPACE,并起监控dSPACE的作用。
仿真控制策略如图8所示,当加速踏板位置传感器信号AP、车速信号和SOC信号满足阈值要求时,进入模拟发动机倒拖制动状态;不满足要求时,则进入无模拟发动机倒拖制动状态。其中当车速低于10km/h时,由于电枢反电动势过低且车辆动量很小,能量回收效率很低,退出再生制动[9]。另外,当荷电状态SOC超过0.8时,为保护电池,也退出再生制动[10]。
仿真目标车型为一款双电机独立驱动电动车辆[11],其电池组容量为90A·h,额定电压为288V,电机额定功率为15kW,额定转矩为60N·m,额定转速为2 550r/min。其他参数详见表2。设置初始速度为10km/h,电池组初始荷电状态为0.8,加速踏板逻辑门限值设为0.3,路面附着系数设为0.7。
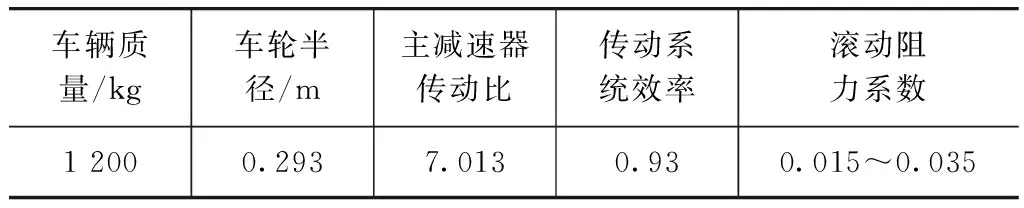
表2 目标车型参数
因实际测量的驾驶员加速踏板信号中含有白噪声,在对信号做进一步分析前,采用中值滤波法进行降噪处理。加速踏板信号AP滤波前后对比如图9所示,可以看出降噪效果良好。对加速踏板信号AP求导得到加速踏板行程变化率dAP/dt,见图10。
图11为有无模拟发动机倒拖制动策略下的车速对比。结果表明,在模拟发动机倒拖制动策略下的车速较低,满足了驾驶员松开加速踏板降速的要求。这是因为当加速度踏板行程超过一定门限值时,会有一定的再生制动力,从而降低了一定的车速,这也验证了模型的正确性。
图12为有无模拟发动机倒拖制动策略下的电机转矩对比。结果表明,在无模拟发动机倒拖制动策略下,电机转矩随加速度踏板开度而变化,且一直处于驱动状态;而模拟发动机倒拖制动策略下的电机输出有驱动和再生制动两个状态,再生制动转矩大小由模糊控制器输出的电机再生制动转矩变化率决定。仿真数据显示,最大再生制动转矩为15N·m,不超过最大转矩的30%,符合控制策略要求。
图13为有无模拟发动机倒拖制动策略下的SOC对比。结果显示,模拟发动机倒拖制动策略下的SOC下降较为缓慢,仿真结束后,SOC由0.8下降到0.789 7;而无模拟发动机倒拖制动策略下的SOC由0.8下降到0.788 7。
4 结论
本文中提出了基于加速踏板输入的再生制动控制策略,采用模糊控制,模拟传统内燃机车辆的发动机倒拖制动。其优势在于能够提供和传统内燃机车辆相似的驾驶感觉,并且能够回收一定能量,延长续驶里程。不足之处在于逻辑门限值大小的设定还存在一定疑问,有待于今后通过实车试验找寻最佳门限值,对这一问题进行更深入的研究。
[1] Hellgren J, Jonasson E. Maximization of Brake Energy Regeneration in a Hybrid Electric Parallel Car[J]. International Journal Electric and Hybrid Vehicles,2007,1(1):95-120.
[2] Daniel Montesions, et al. Design and Control of a Modular Multilevel DC/DC Converter for Regenerative Applications[J]. IEEE Transactions on Power Electronics,2013,28(8):3970-3979.
[3] Petar J Grbovicri, Phlippe Delarue, et al. The Ultracapatitor-Based Regenerative Controlled Electric Drives with Power-smoothing Capacity[J]. IEEE Transactions on Industrial Electronics,2012,59(12):4511-4521.
[4] 陈燕.汽车发动机原理与汽车理论[M].北京:人民交通出版社,2010:43- 45.
[5] 李士勇.模糊控制[M].哈尔滨:哈尔滨工业大学出版社,2011:64-95.
[6] Iqbal Husain. Electric and Hybrid Vehicles Design Fundamentals 2ndedition[M]. USA: CRC Press,2010.
[7] David A Crollaa, Dongpu Caob. The Impact of Hybrid and Electric Powertrains on Vehicle Dynamics, Control Systems and Energy Regeneration[J]. Vehicle System Dynamics,2012,9(50):95-109.
[8] 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2011:368-379.
[9] Yeo H, Kim H. Hardware-in-the-loop Simulation of RegenerativeBraking for a Hybrid Electric Vehicle[J]. Automobile Engineering,2002,216(D11):855-864.
[10] Gao H, Gao Y, Ehsani. A Neural Network Based SRM Drive Control Strategy for Regenerative Braking in EV and HEV[J]. In the IEEE International Conference on Electric Machines Drives,2001,23(9):571-575.
[11] 林程,等.电动汽车双电机防滑差速驱动桥:中国,200810097693[P].2009-09-02.
A Research on Regenerative Braking Control StrategyBased on Acceleration Pedal Travel
Lin Cheng, Liu Xiahong & Dong Aidao
BeijingInstituteofTechnology,NationalEngineeringLaboratoryforElectricVehicle,Beijing100081
A regenerative braking control strategy based on accelerator pedal travel is proposed for electric vehicle. When the accelerator pedal travel exceeds a certain threshold value, the regenerative braking torque of motor is calculated with fuzzy control algorithm and the process of engine drag braking is simulated. Then the models for motor and battery are created, a dSPACE hardware-in-the-loop comparative simulation is conducted on both the control strategy proposed and that without engine drag braking with the signal of acceleration pedal travel as input. The results show that with the control strategy proposed, the motor torque can well follow the driver’s operation requests and the engine drag braking can recover a certain amount of energy.
regenerative braking; acceleration pedal travel; fuzzy control; dSPACE hardware-in-the-loop simulation
*国家自然科学基金(51175043)资助。
原稿收到日期为2013年8月12日,修改稿收到日期为2013年11月7日。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电机与控制学报(2018年9期)2018-05-14
汽车与安全(2017年4期)2017-12-07
投资北京(2017年1期)2017-02-13
北京汽车(2016年5期)2016-11-10