
用于激光测振的聚焦扫描系统
2015-04-13 09:31娄鑫鑫李华丰
计测技术 2015年2期
娄鑫鑫,李华丰
(中航工业北京长城计量测试技术研究所计量与校准技术重点实验室,北京100095)
0 引言
我国在激光测振方面,起步较早,研究面涉猎较广,在理论和技术实现上均取得了一定进展,但仅限于方法研究和试验系统的搭建,以满足实验室校准和测量应用,将这些成果延伸到各种现场结构、动态性能的校准与分析的研究工作则开展较少,缺乏试验现场复杂环境下的振动测试能力[1]。由于激光测振仪系统复杂、技术含量高、涉及光机电算多门学科,因此尚未形成成熟的商业化产品,已研制的激光测振系统组件繁杂、集成化差、操作专业化程度高、缺少配套的硬件解调设备、系列化和标准化程度低,仅能作为具有研制性质的非标设备,用于一些特殊场合,满足实验室科研和校准应用[2]。
近年来,单点式激光测振仪在我国已经逐渐成型,但是其灵活度很低,测量不同的位置需要不断移动或者转动被测物,针对这种情况,本文介绍了一套可以进行聚焦扫描的系统,在扫描的同时进行聚集以测量面内各个点的振动情况,从而改变单点式激光测振仪的测量范围,达到更简单快捷的范围测量效果。
本系统的指标为:扫描速度达到20 点/s;聚焦范围≥0.3 m;能够实现对测量范围内高分辨力(与电机细分数相关)的测振。
1 扫描方案的比较和确定
根据扫描原理和各类实现扫描产品的特性,可以将现有的扫描方法分为两种:单平面镜扫描和双平面镜扫描[3]。对这两种方法的优缺点所做的总结分析见表1。
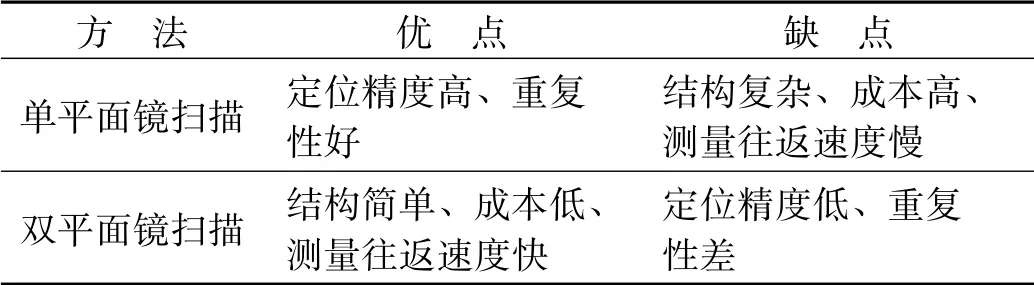
表1 扫描方法比较
单平面镜扫描利用转台以及在转台上运行轨迹与转台垂直的装置使平面镜能够把入射光反射到一定的平面上,因此转台的转动惯量大。在对一个范围内多个点进行扫描时,需要装置往返运动,此结构往返速度慢,达不到很高的测量速度,但同时其系统稳定,有很好的定位精度与重复性。
对点的振动进行测量需要聚集,因此本系统在双平面镜扫描的基础上增加了一个聚集结构。聚焦扫描系统对扫描速度有一定的要求,测量一个范围内的点需要不断往返运动,所以,双平面镜扫描法可以作为首选方案。双平面镜扫描法装置结构简单,通过步进电机控制两个空间上相互垂直的平面镜旋转来实现扫描,如图1所示,两个平面镜的运动方向相互垂直。
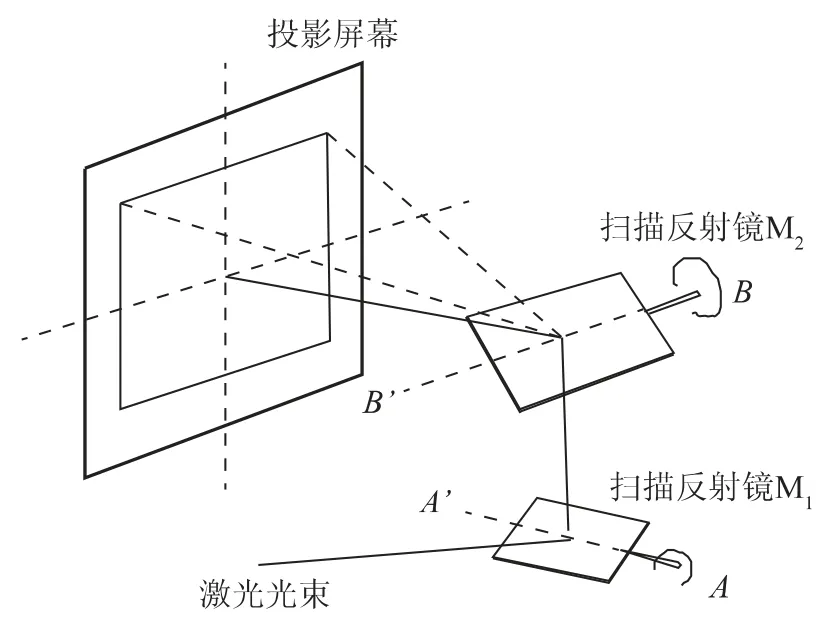
图1 双镜扫描法
由图1 可以看出,扫描反射镜M1上的光斑位置不会变化,而扫描反射镜M2上的光斑位置会有一定范围的变化,因此M2的面积大于M1的面积,假设两平面镜轴向垂直距离为30 mm,扫描角度为±20°,由三角关系可知,反射镜M2的长度至少为21.8 mm。最后选择反射镜尺寸为30 mm×40 mm×2 mm。
转动惯量公式[4]为

式中:J 表示转动惯量;m 表示反射镜质量;l 表示垂直于轴向的反射镜长度。由转动惯量公式可以算出平面镜及其固定装置的转动惯量为J=3.77 g·cm2。根据最短加速时间30 ms 和最大转速100 r/min,求出其最大角加速度β=348.889 rad/s2。
转矩公式[5]为
T=Jβ
由转矩公式可算出总转矩T=3.77×10-7kg·m2×348.889 rad/s2=1.315 g·cm,据此选择符合要求的28 两相混合步进电机。
2 光路的设计
本系统中的光路需要经过聚焦系统与扫描系统,考虑到整体的美观性与光的出射位置,在聚焦系统与扫描系统中加了一块反射镜,不仅方便了光路的调试也使系统的整体布局更加合理。
根据激光的走向,可以设计出反射结构的具体模型,如图2所示。激光器与反射镜之间的位置用来放置聚焦系统,此系统不会改变激光的走向。

图2 反射结构及光路示意图
在图2所示的反射结构的光路图中,激光从激光器射出,第一个反射镜的角度可以调节,从而改变光的出射角度,使其能够经过两个电机轴的轴线位置。此部分结构的设计需要保证光线的高度,为了和单点式激光测振仪配合,设计的光线高度为47 mm,与单点式激光测振仪的激光高度等高,在设计步进电机支撑座时使其垂直度在0.04 mm 内,以保证电机轴的水平度。
3 聚焦结构的设计
本文所设计的聚焦系统聚焦范围大于等于0.3 m。系统的聚焦部分由一个凹透镜和一个凸透镜组成的透镜组来构成,如图3所示。透镜1 选择直径为12.7 mm、焦距为-50.8 mm 的凹透镜;透镜2 和透镜1 之间的最近距离设为a,透镜2 能够在导轨上移动。
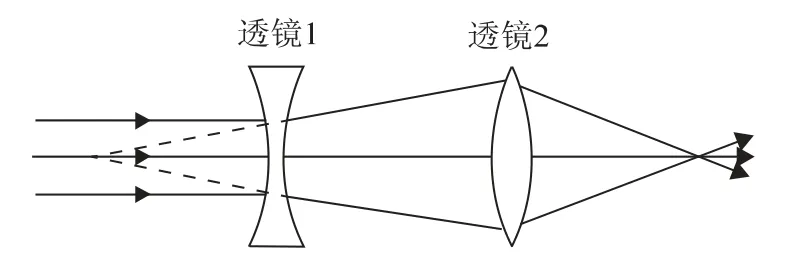
图3 聚焦透镜组
对于透镜移动部分的设计如图4所示。此部分依靠步进电机来实现,步进电机的转动带动与联轴器相连的丝杠转动,从而带动滑块部分做水平运动。由于滑动部分是直线移动,因此对丝杠与导轨之间的平行度要求较高,保证平行度在0.04 mm 内。
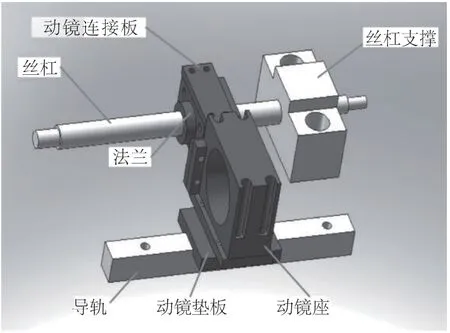
图4 聚焦结构的设计
根据透镜成像的物像位置关系可列出方程组:
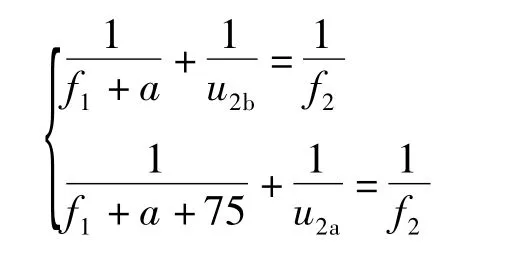
式中:f1为凹透镜的焦距,f1=-50.8 mm;f2为凸透镜的焦距;u2b为凸透镜移动前的像距;u2a为凸透镜移动后的像距。第一个式子中,透镜的物距为凹透镜的焦距与两块透镜之间的最近距离之和f1+a,这个时候像距应该为无穷大;在第二个式子中,设透镜2 移动了75 mm,这时应该聚焦在盒体外0.3 m 处,因为光束需要经过反射镜和透镜,像距取500 mm。所以解得动镜座内的透镜焦距f2≈150 mm,两块透镜之间的距离a≈100 mm。
整个聚焦部分的驱动是靠步进电机带动丝杠转动产生的,图4 中深色部分为移动部分,根据丝杠的转动而移动,在动镜座当中放置所选透镜,透镜移动使焦距发生变化。
4 总体结构的设计
将所应用的扫描方式和设计的聚焦结构相结合,给出了聚焦扫描系统的总体结构设计方案,如图5所示。
5 V 的电源用于对电路进行供电,12 V 的电源用于对步进电机控制器进行供电,总共有三个步进电机控制器分别控制三个步进电机,步进电机依靠固定装置固定在底座上,固定装置所用材料为45 号钢。本系统的总体尺寸为292 mm×182 mm×131 mm。

图5 总体结构示意图
设计总体结构时,选择了128 细分的步进电机控制器,可以使步进电机运行一步的转动角度为0.84',在测量距离较近(小于3 m)的情况下,可以看做能够对测量范围内每一点的振动进行测量。
5 扫描步骤
用聚集扫描系统扫描的同时需要保证能够聚焦,因此在使用软件控制时需至少确定三个点,通过三次选择光点位置并聚焦来确定扫描平面及其平面方程。其扫描步骤如图6所示。
根据三点确定平面方程并通过求解方程得到当控制光点位置的电机移动时控制焦距的电机相应移动的步数,在扫描时光点每移动一次同时调节焦距,这样能够在进行扫描的同时达到聚焦。

图6 扫描系统流程图
6 实验
6.1 焦距的测量
图7 为验证聚焦范围的装置,实验选用JDSU 的He-Ne 激光器,其激光束直径为3 mm,近似准直光,对测定的实验结果影响微弱。在进行实验时调节透镜2 的位置,当光束聚集时,用光束分析仪测量光斑直径为50 μm,动镜再往任何一个方向移动光斑都会变大,根据此方法可以确定本装置的聚焦范围大于等于0.3 m。
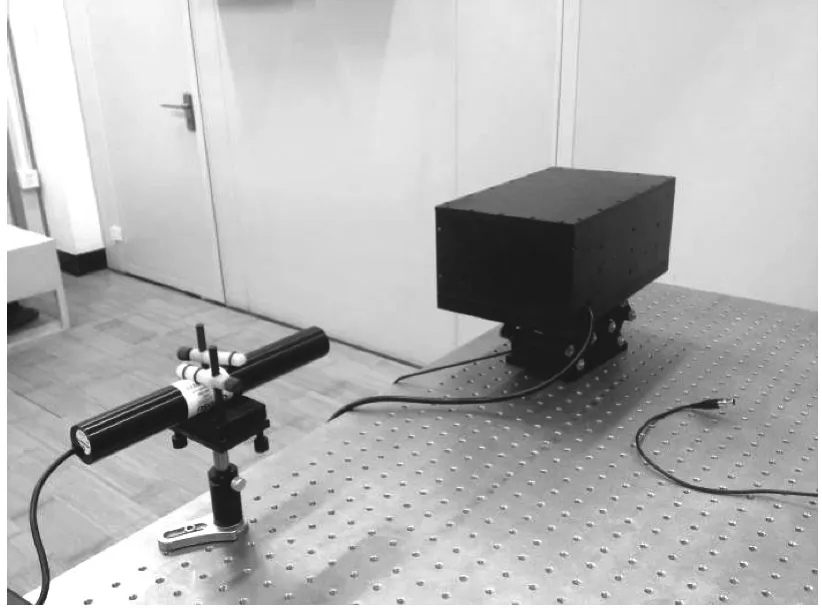
图7 实验装置
6.2 扫描速度的测量
本系统的扫描速度指标为20 点/s。实验采用的方法是根据多次测量扫描总体时间来计算其扫描速度。多次测量的情况如表2所示。
在编写的程序中设定的扫描点数为横轴和纵轴各40 个点,总共一次扫描1600 个点。根据表2 可以得出扫描速度平均为20.3 点/s,因此能够达到提出的20点/s 的指标。
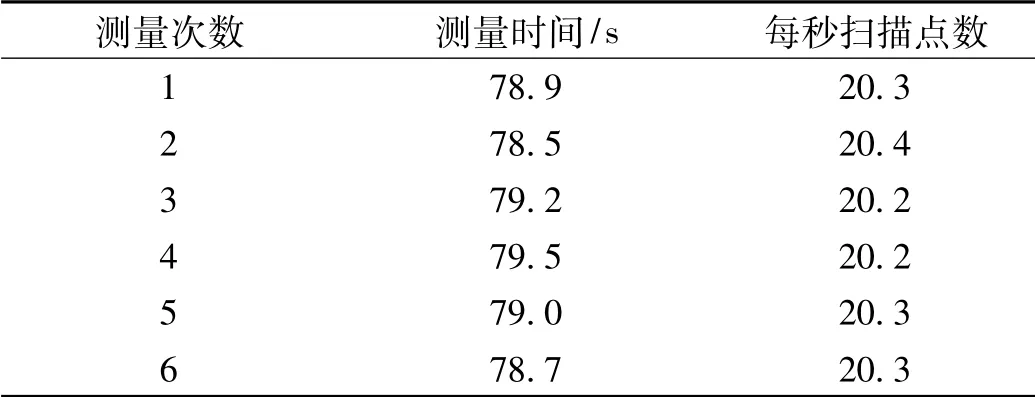
表2 扫描速度的统计时间表
6.3 与单点式激光测振仪配合测量
本系统主要应用于单点式激光测振仪,因此需要与激光测振仪配合进行实验。图8所示为搭建的实验装置,其中主要包括单点式激光测振仪、聚焦扫描系统、示波器和反射镜。实验中用反射镜模拟被测物,把它分别放在不同距离的各个位置,在距离系统0.1,0.3,0.5 m 的位置进行测量,都可以得到如图9所示的波形,且经过一定的调整之后可以调节到与之接近的幅值。此即为单点式激光测振仪接收到的波形,其幅值表示接收到的信号强度,测振仪出射的激光频率为40 MHz,在经过物体表面反射后,根据被测物的振动速度接收到的光频会发生相应变化,再通过解调系统便可以得出物体的振动参数。

图8 与测振仪配合测量示意图
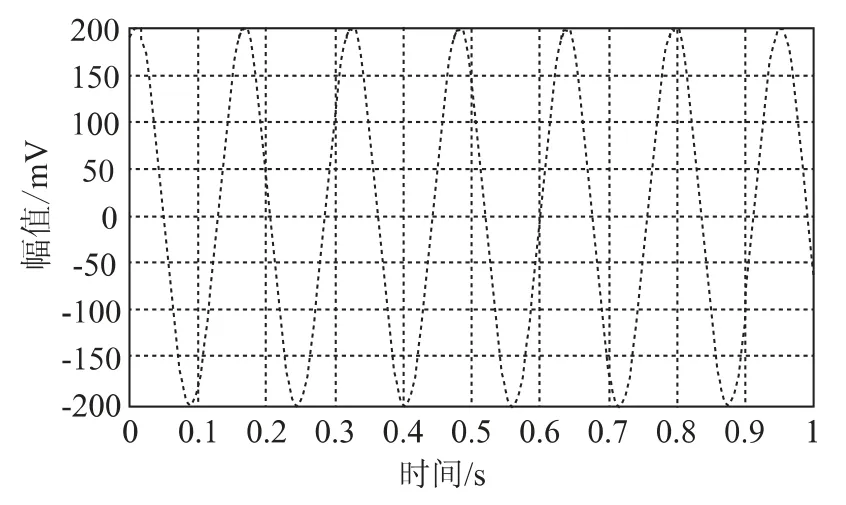
图9 示波器接收到的波形
7 结论
通过对聚焦扫描系统的分析和设计,构建了一套完整的用于激光测振的聚焦扫描系统;设计了系统机械构架,通过预留尺寸和手动调整保证光路在经过聚焦系统时的直线度,并通过实验验证了该系统的可行性。本文设计的聚焦扫描系统成本低、操作简便,能够改变入射测振光光线的角度并聚焦,具有很好的实用性。
[1]孙太东.激光扫描技术的发展及其应用[J].光机电信息,2000,17(5):1-8.
[2]张合富,朱振宇,朱国勤.激光测振仪校准技术评述[J].计测技术,2014,34(6):5-8.
[3]张会霞,朱文博.三维激光扫描数据处理理论及应用[M].北京:电子工业出版社,2012.
[4]吴柏师.大学物理学[M].北京:高等教育出版社,2012.
[5]汤蕴璆,罗应立,梁艳萍.电机学[M].北京:机械工业出版社,2008.
猜你喜欢
新能源科技(2022年9期)2022-11-20
中学生数理化·八年级物理人教版(2022年10期)2022-11-10
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
中学生数理化·八年级物理人教版(2020年10期)2020-11-26
锦绣·上旬刊(2020年3期)2020-06-08
环境技术(2020年1期)2020-03-06
中学生数理化·八年级物理人教版(2019年10期)2019-11-25
光学精密工程(2016年6期)2016-11-07
