
船载式水声定位系统的姿态测量与修正技术研究
2015-04-13 18:50张庆国马小勤龚浩亮
现代电子技术 2015年1期
张庆国 马小勤 龚浩亮

摘 要: 针对船载式水声定位系统的姿态测量及修正问题进行了分析与研究。利用姿态角修正公式对姿态角引起的系统定位误差进行仿真,仿真结果表明同等条件下航向角对其影响较大,并且系统不同方位上的定位精度不同。采用GPS/北斗卫星级联结合微型惯导的组合方式进行船体姿态测量,经过湖上实航试验证明,该方案测量精度高,数据率更新快,并且实施简单,能够满足船载式水声定位系统的需求。目前,该方案已在某型水声定位系统上得到了具体应用,具有较高工程实用价值。
关键词: 船载系统; 水声定位系统; 姿态测量; 姿态修正
中图分类号: TN929?34 文献标识码: A 文章编号: 1004?373X(2015)01?0073?04
Abstract: The problems existing in attitude measurement and correction of the shipborne acoustic positioning system are analyzed and researched. The system′s positioning error caused by attitude angle was simulated with the attitude angle correction formula. The results show that the heading angle impacts the positioning error more under the same conditions, and the positioning accuracy in the different orientation is different. The compound mode combining GPS / Beidou satellite cascade with miniature inertial navigation is adopted to execute the ship attitude measurement. The result of testing in a lake proves that the program have the high measurement accuracy, fast data update rate and simple implementation, and can satisfy the demands of shipborne acoustic positioning system. The program has been applied to a specific type of underwater sound positioning system. It has high practical value.
Keywords: shipborne system; acoustic positioning system; attitude measurement; attitude correction
0 引 言
船载式水声定位系统可在船只高速航行状态下实时完成水下目标的航行轨迹跟踪。主要用于鱼雷等水下武器的实航试验,可实时获得鱼雷航行弹道轨迹以及脱靶量、攻击舷角等攻击效能评估参数,是水下武器进行试验评估的重要手段。
船载式水声定位系统在以往座底式水声跟踪系统的基础上,使水下目标的动态实时相对定位变得更加精确,贴近实战且使用灵活、方便,但同时也出现了一些相应的问题。例如,如果要定位精确,必须要实时高精度获得水下基阵的姿态信息,并对水声定位系统测量的定位数据进行相应修正处理[1]。否则,在船速过快或者船体有较大摆动时系统定位精度将受到较大影响,严重时甚至给出错误轨迹,无法正确定位。
1 船体姿态对定位系统的影响分析
考虑到试验船只需要在高速运动状态下实时进行水下目标的跟踪与测量,同时,为了尽量提高水声定位系统的测量精度和试验效率,这里采用水下基阵固定安装在试验船底的测量方案。因此,在不考虑偏移和安装误差的情况下,定位系统水下基阵的姿态与试验船体姿态相同。
1.1 姿态角定义
通常情况下,船体姿态是由航向角(又称航偏角)、横滚角(又称滚动角)和俯仰角(又称纵摇角)来定义的。船体姿态角的坐标系采用船体坐标系(BFS),以船体重心为原点,[Y]轴指向船体运动的方向,[X]轴垂直于[Y]轴指向船体右侧,[Z]轴与[X,Y]轴正交形成右手坐标系,如图1所示。为了方便后续进行姿态角修正公式的计算,这里规定航向角、俯仰角及横滚角的正方向与图1中旋转箭头标注相同。
1.2 船载式水声定位系统的姿态修正
船载式水声定位系统得到的轨迹往往是以船载基阵为中心的北向坐标系中的轨迹,是相对的。而在试验中,实际更需要的是相对于大地坐标系的绝对轨迹,因此,需要进行坐标系统的转换与修正。
假定在测量过程中,基阵坐标系原点相对于大地坐标是静止的,并认为两个坐标系原点相同或有固定偏移(偏移量[(x0,][y0,][z0)T),]这样,只需考虑基阵围绕坐标轴的转动便可。假设基阵坐标系为[oxyz,]大地坐标系为[OXYZ。]如图1所示,基阵先绕[Z]轴转动[φ]角(航向角),再绕[Y]轴转动[α]角(横滚角),再绕[X]轴转动[β]角(俯仰角)。
1.3 姿态角对水声定位系统的影响分析
为了明确船体姿态角对船载式水声定位系统的测量精度影响,针对[α、][β、][φ]引起的定位误差进行仿真分析。
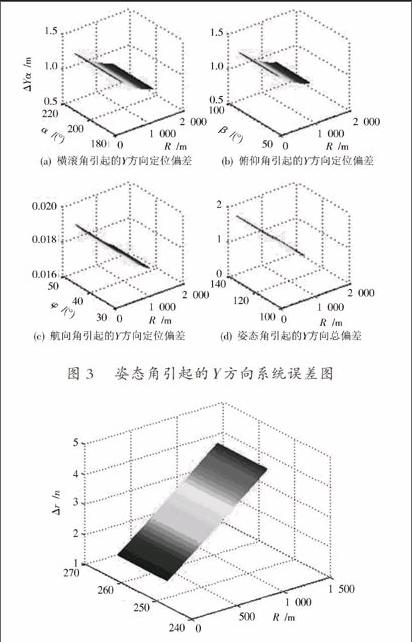
将船体姿态角[φ]精度设为0.1°,[β]及[α]的测量精度设为0.5°,假设系统[α,][β,][φ]引起的系统定位误差相互独立,在不考虑文献[1]和文献[4]中所分析的其他误差源(如声速、时延值、基阵孔径等)的基础上,针对姿态角对水声定位系统的定位精度影响进行仿真分析。依据实际船只航行经验,船体在航行中的俯仰角及横滚角多在3°以内,因此,仿真设定[α、][β]均为最大值3°。假设目标在与水声定位系统基阵原点相距(斜距)为[R]的点位上,[R]变化范围是1~1 080 m,步长为3 m。同时在每个[R]距离点上进行航向角1°~360°的变化,计算在该点距离、方位产生最大系统定位偏差时,所对应的姿态角度。分别对[X]方向、[Y]方向及总体定位误差Δr进行仿真分析,其结果如图2~图4所示。
从图2可以看出,相对于[α、][β]来说,[φ]角度引起的系统[X]方向定位误差最大, 图3中显示[α]和[β]引起的系统[Y]方向误差基本相同,而[φ]角引起的误差偏小。图4为系统总定位误差分析图,可以看出当水下目标与船体航向夹角为255°~270°范围内时,由姿态角引起的误差最大(约为4‰)。也就是说在试验设计方案时,可以尽量避免将水下目标与试验船只交汇点设计在定位误差最大的区域内,以减少由于姿态角测量精度带来的系统定位误差。
2 姿态参数测量方法
试验船只在水面航行时,船体会因风浪、水流等因素的作用而发生姿态变化,此外船只自身的操作要求也会造成其姿态角的不断变化。
2.1 姿态测量常规方法
传统船载式水声定位系统一般通过两种方式进行姿态测量,一是先设计稳定平台,再将平台安装在试验船只上,利用陀螺仪进行姿态测量;二是直接以船上的主惯导系统所提供的姿态信息为基准,通过数据传递的方式完成水下基阵的姿态测量。虽然上述两种方法具有精度高、抗干扰强等特点,但同时也存在一些缺点:利用陀螺力学特性设计的稳定平台结构复杂,对器件和工艺的要求很高,使得稳定系统体积较大,成本高;利用船只主惯导数据存在与水下基阵安装位置的差异性,并且姿态信息传递干扰较大,且不易校准,另外,在没有惯性导航系统的船只上无法使用。
船载式水声定位系统的水下基阵固定安装在试验船只上,不可能在船只上预留稳定平台,也不可能要求试验船只提供姿态数据,而高精度的惯性导航设备价格又较为昂贵。因此,在系统试验时需要设计一种简单、可靠的姿态测量方法,以满足水声定位的需求。目前,船载姿态测量都是采用陀螺仪和加速计组成的惯性导航系统,但是惯性导航系统结构复杂、价格昂贵,在振动环境下,要获得足够精度和稳定度的姿态测量数据较难。并且陀螺罗经启动需要时间较长,还存在由于陀螺仪漂移而使姿态测量误差随时间的积累而越来越大的致命弱点。
2.2 卫星/惯导组合测姿方法
随着GPS/北斗载波相位技术与相干测量技术的飞速发展,相对定位的精度越来越高,已经达到毫米量级,为船只姿态测量精度的提高提供了可靠的保证。早在20世纪90年代国外已在GPS的姿态测量上有了较为广泛的研究和应用[2?3]。由于相干测量技术的实质是一种无码技术,不需要对导航星的导航星载波相比较获得测量值,只需将解算的整周模糊数与姿态动力学相结合,便可确定载体的姿态。因此,可大大减少对国外GPS的解码依赖,同时考虑到军事应用的可能性。
这里采用GPS级联北斗的卫星姿态测量方案,同时结合小型MEMS陀螺和MEMS加速度计辅助的方法,提高船体姿态测量的可靠性和准确性。卫星天线采用双频、双天线(基线长度为3 m),兼容GPS与北斗系统,可同时工作。该测量方案与单纯惯性导航系统相比较,具有结构简单、价格低廉、精度稳定、体积小、可靠性高等优点。卫星天线固定安装在试验船只的顶部后,通过馈线与舱内的接收机相连。这里需要注意的是,一旦天线安装完成后,由于两个天线组成的连线和真实船只头尾连线定会存在一个固定偏角;另外,两个卫星天线顶端组成的面与船只水平面也会存在一定的夹角。因此,在姿态测量设备安装完成后,需要利用标准测姿设备或者船载主惯导系统进行姿态数据的校准分析,获得相对固定的偏角和夹角,在实际测量时进行简单的修正便可对安装偏差进行校正。
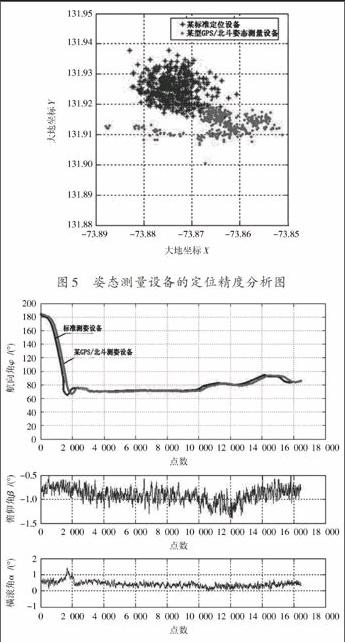
在国内某区域标较过的标准点位(已知精确坐标),采用标准定位设备对船载式水声定位系统的姿态测量设备进行实际测量,数据分析结果如图5所示。从图5可以看出,该测姿设备的实测定位精度可达到厘米级别,并且自身的定位精度可达毫米级,足以满足船只定位精度要求。
采用标准姿态测量设备对其姿态参数的实验测试,在某水域上获得的测试结果如图6所示。从图6可以看出,两个设备的航向角测量数据具有一定的重合度(数据记录时间不同),并且其俯仰角和横滚角的实际测量精度较高,能够满足船载式水声定位系统要求。
3 试验研究
为了验证测姿设备在船载式水声定位系统实际工作时的整体效果,在某湖上水域进行试验测试。安装有水声定位系统及姿态测量设备的试验船只从北向南航行,而载有声源(发射与定位系统相匹配的声信号)的渔船向东北方向滑行,定位系统根据测姿设备提供的姿态参数进行水声定位数据的修正,最终获得渔船的运动轨迹。试验测试的轨迹图如图7所示。
图7中的声源水声测量轨迹是由船载测量系统获得,而声源GPS轨迹由与声源固定安装在一起的GPS设备获得。GPS设备获得的大地坐标能够与船载式水声定位系统的水声测量轨迹相重合,证明其水声定位系统的测量结果是完整可信的,同时也证明了利用GPS/北斗卫星级联的组合测姿方案,能够满足水声定位系统的坐标转换与实时修正需求,保证了船载式水声定位系统的精度和可靠性。
4 结 语
如何简单、准确地实时获得船体的姿态信息,对于船载式水声定位系统来说是至关重要的。本文针对姿态角对定位系统的影响进行仿真分析,结果表明在同等条件下不同方位角内定位系统的测量精度不同。可在策划试验方案时,避开误差较大的区域,以提高测量精度。
采用GPS/北斗卫星级联结合微型惯导的组合测姿方案,具有实施简单,使用灵活、方便,精度高等优点,且能在丢失卫星的情况下利用内置惯导数据进行短时间的姿态数据保持输出。经过湖上试验船只的实际测试,证明该姿态测量方案能够满足船载式水声定位系统的动态测量需求,并且经过坐标修正后的船载式水声定位系统测量精度可达5‰,即使在相对水声环境较为恶劣的动态实航条件下,定位系统可靠跟踪距离可达1 500 m。
参考文献
[1] 张庆国,王健培.船载式水声跟踪系统定位原理及误差分析[J].现代电子技术,2013,36(23):70?73.
[2] JUANG J C, HUANG G S. Development of GPS?based attitude determination algorithms [J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(3): 968?976.
[3] FERRANDO C, PEREZ A, SANCHEZ P R S. Integer ambiguity resolution in GPS for spinning spacecrafts [J]. IEEE Transactions on Acerospace and Electronic Systems, 1999, 35(4): 1219?1229.
[4] 刘松海,孙向前,岳剑平.智能鱼雷攻潜部位及攻击角测量方法与误差分析[J].舰船科学技术,2012,34(4):79?88.
[5] 马福诚,刘保良,滕拥军,等.基于加速度计的载体姿态测量模型设计与实现[J].现代电子技术,2008,31(13):61?63.
[6] 张庆国,王健培.船载式水声跟踪系统定位原理及误差分析[J].现代电子技术,2013,36(23):70?73.
