
基于LabVIEW 超声定位系统的设计与研究①
2015-04-14 08:06张连军
佳木斯大学学报(自然科学版) 2015年5期
张连军,常 江,薛 迪
(佳木斯大学机械工程学院,黑龙江 佳木斯154007)
0 引 言
超声波定位是一种传统而实用的非接触测量方法,和激光、涡流和无线电测距方法相比,具有不受外界光及电磁场等因素的影响的优点,在比较恶劣的环境中也具有一定的适应能力,且结构简单,成本低,因此在工业控制、建筑测量、机器人定位方面得到了广泛的应用.近年来,室内机器人与室内监控已受到越来越多的关注,因此,对室内短距离精确测量和定位的超声系统的研究也成为一个热点.通过研究,可以对于测量精度要求较高的场合,如室内短距离的精确测量和超声波定位系统,移动机器人室内定位等的精确测量都有实质的意义.
1 超声波原理
声波振动频率的范围,可以分为次声波、声波、超声波.频率高于人类听觉上限频率(约20kHz)的声波,称为超声波[1].超声波检测中常用的工作频率在0.25 ~20MHz 范围内.超声波在介质中传输的速度即介质的声速,用C 表示.它是一秒钟超声波等相位面通过的距离,与介质的密度和弹性性质有关.对于液体介质,只能传播纵波,以CL表示.
式中:K 为介质的体积弹性模量;ρ 为介质的密度.
超声波产生依靠超声波传感器,超声波传感器分机械方式和电气方式两类[2],它实际上是一种换能器,在发射端它把电能或机械能转换成声能,接收端则反之.本系统采用电气方式中的压电式超声波换能器,它是利用压电晶体的谐振来工作的.它有两个压电晶片和一个共振板,当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,产生超声波.反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,就成为超声波接收器.

图1 超声测距原理图

图2 超声波的定位算法原理图
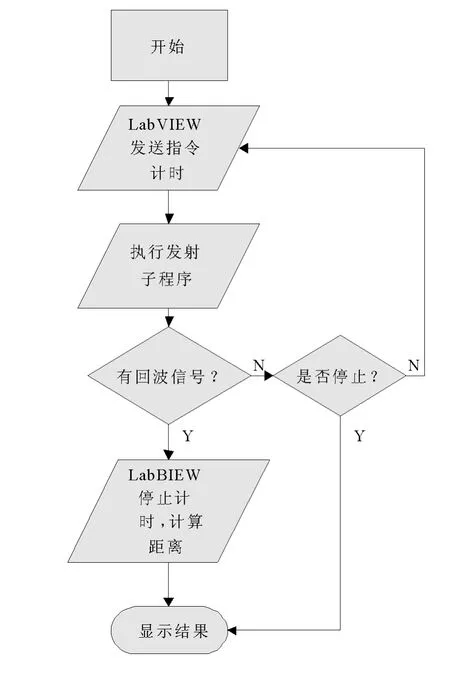
图3 总流程图
2 超声定位方案
2.1 超声测距
超声波的定位是基于超声测距[3],利用三球定位法和空间坐标系来定位被测物体.超声测距方法有脉冲回波法、共振法和频差法.其中脉冲回波法测距最为常用,它主要基于超声测距回波信号的识别,多采用模拟方法,用电路来实现.超声测距的原理图如图1 所示.其原理是超声传感器发射超声波,在空气中传播至被测物,经反射后由超声传感器接收反射脉冲,测量出超声脉冲从发射到接收的时间t,在已知超声波声速C 的前提下,利用:
即可计算得传感器与反射点之间的距离S,测量距离

当S >>h 时,则d ≈S,即:

2.2 超声定位
利用超声波传感器能感知超声波物理现象,把感知到的超声波的时间差作为测量数据来进行定位的[4].基于超声波测量的定位算法的原理如图2所示.
三个测点的站址在测量坐标系中的位置坐标分别记为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),信源到达3 个测量站的时间分别为cΔt1,cΔt2,cΔt3,超声波在空气的传播速度为c,则利用三球进行定位的公式为:

式中cΔt1=R1,cΔt2=R2,cΔt3=R3,联立解以上方程组,就可以得到目标的位置.
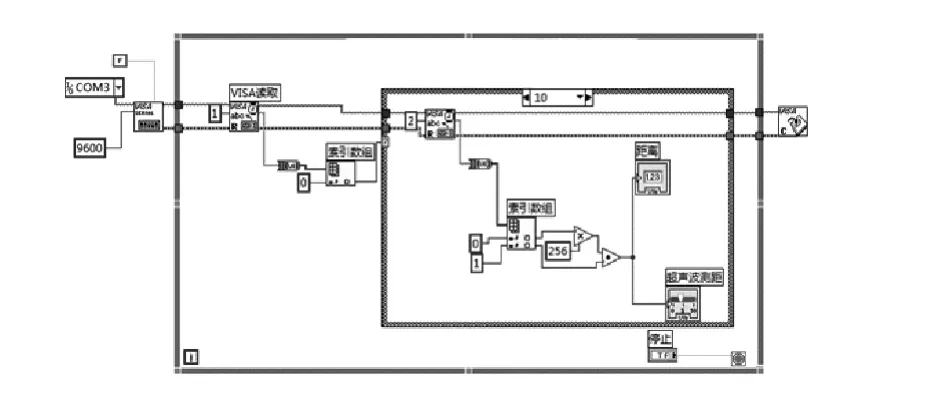
图4 系统程序图
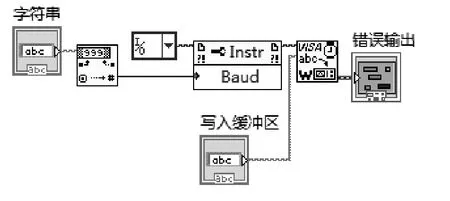
图5 串口程序图
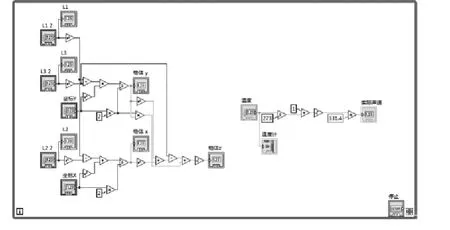
图6 超声波定位算法程序图
3 定位的软件部分设计
3.1 系统软件总体设计
软件总的程序流程图如图3 所示.系统在接收到开始指令后,由LabVIEW 程序向串口发送指令串同时开始计时[5].单片机在接收到上位机发送的指令串以后执行超声波发射子程序[6].当有回波信号通过数据采集卡传回上位机时,LabVIEW程序停止计时,并对时间、距离进行计算.对回波信号进行分析.最后显示结果.若没有回波信号则查询是否有停止指令,有则显示无结果,没有则重新计时并向串口发送指令.
3.2 LabVIEW 程序设计
系统程序设计如图4 所示.通过串口通信子VI 向单片机发送“01111110”的八位字符串.单片机在接收到上位机发出的字符串以后运行超声波发射子程序,也就是发出16 个频率为25kHz 的方波脉冲.当数据采集卡采集到回波信号之后,通过VISA 函数向上位机传递数据[7].通过简单算法测出单方向距离.在程序中,只要将VISA 函数的VISA resource name 设置为串口即可实现对串口的控制.其中VISA Configure Serial Port 节点主要用于串口的初始化,当下位机通过串口输入信号后上位机中的LabVIEW 程序就会收到信息经过转换最后通过前面板显示出距离.
串口程序程序如图5 所示.
系统在接收到开始指令后,由LabVIEW 程序向串口发送指令串同时开始计时.单片机在接收到上位机发送的指令串以后执行超声波发射子程序[8].当有回波信号通过数据采集卡传回上位机时,LabVIEW 程序停止计时,并对时间、距离进行计算.对回波信号进行分析.最后显示结果,若没有回波信号则查询是否有停止指令,有则显示无结果,没有则重新计时并向串口发送指令.
算法程序框图如图6 所示程序是由超声波定位算法通过LabVIEW 编程所得.
4 结束语
LabVIEW 是高效图形化应用开发环境,它结合了简单易用的图形化开发方式和灵活强大的编程语言.提供一个直觉性环境,并通过与测量硬件的密切结合,可以迅速开发出有关数据采集和控制,数据分析和数据显示的应用系统.基于Lab-VIEW 开发的超声波定位系统,可针对各式的研发量测或机器人定位测量需求,快速进行客制化的修改.这个系统可行性高,复杂性低,定位精度高.
[1] 瞿金辉,周蓉生.超声波测距系统的设计[J].中国仪器仪表,2007(8):44 -45.
[2] 王润田.双频超声波测距[J].声学技术,2006,3(1):22-26.
[3] 童峰,许水源,许天增.一种高精度超声波测距处理方法[J].厦门大学报,2012,4(2):15-19.
[4] 杨凤霞.基于LabVIEW 的虚拟信号发生器的设计[J].电子测试,2014,(21).
[5] 吴湖青,李秀梅,孙晨林.基于LabVIEW 的信号处理虚拟实验平台[J].杭州师范大学学报(自然科学版).2014,(06).
[6] 鲍玉军.LabVIEW 在“电子测量技术”课程教学中的应用[J].常州工学院学报,2009,(06).
[7] F.Figueroa,E.Barbieri.An Ultrasonic Ranging System for Structural Vibration Measurements[J].IEEE Trans.Instrumentation and Measurement,2010,40(4):764-769.
猜你喜欢
车迷(2022年1期)2022-03-29
中国化妆品(2020年9期)2020-10-09
科学(2020年3期)2020-01-06
小学生学习指导(低年级)(2019年10期)2019-11-26
车迷(2018年12期)2018-07-26
小学生学习指导(低年级)(2017年12期)2017-11-22
电子制作(2017年7期)2017-06-05
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
