
非线性滤波算法在新的组合定位系统中的应用研究*
2015-04-15 08:31田安红付承彪徐昆良
弹箭与制导学报 2015年4期
田安红,付承彪,徐 坚,刘 昆,徐昆良
(曲靖师范学院计算机科学与工程学院,云南曲靖 655000)
非线性滤波算法在新的组合定位系统中的应用研究*
田安红,付承彪,徐 坚,刘 昆,徐昆良
(曲靖师范学院计算机科学与工程学院,云南曲靖 655000)
在新的GPS与DTMB组合定位系统中,针对定位方程具有非线性特性,从视距和非视距两种传播环境,对比分析两种非线性滤波算法在组合定位系统中的动态跟踪效果。仿真表明,扩展卡尔曼滤波(EKF)算法和粒子滤波算法(PF)均能在组合系统中成功实现定位跟踪,视距环境下的跟踪效果优于非视距,且在两种传播环境中,PF算法跟踪效果都优于EKF算法,均值和标准差满足都市环境中的定位精度要求。验证了都市环境中采用GPS与DTMB信号进行动态定位跟踪的可行性。
非线性滤波;运动模型;动态跟踪
0 引言
随着全球城市化的趋势,城市人口比例剧增,在现代都市环境中,楼宇密集,交通环境复杂,所观测到的GPS卫星数目和卫星几何图形结构都不理想,无法满足精密定位需求。因此研究都市环境下的定位技术具有重要意义。
在都市中,数字电视信号覆盖范围广,并且数字电视发射塔位置固定[1],功率大。近些年,基于数字电视信号的定位技术得到一定的发展,如美国ATSC标准定位、欧洲DVB标准定位。但中国的数字电视地面广播标准(digital television multimedia broadcasting, DTMB)在2006年颁布[2],对基于GPS与DTMB标准的组合定位技术的研究处于起步阶段。在该组合定位系统中,其伪距方程具有非线性特性,文中采用非线性滤波算法,即扩展卡尔曼滤波(EKF)算法和粒子滤波(PF)算法来对比分析实现动态定位跟踪。又因为在城市环境中,信号因障碍物的遮挡导致传播时为非直射的方式,如反射、折射等,这种误差为非视距误差,因此城市的传播环境主要分为视距(line of sight, LOS)和非视距(non line of sight, NLOS),NLOS误差是都市环境中的主要误差来源,文中研究视距和非视距两种传播环境下,利用GPS与DTMB组合定位技术对高速运动目标的动态定位跟踪效果。
1 DTMB信号体制结构
数字电视地面广播(DTMB)协议基于TDS-OFDM技术[3],其物理信道帧结构由日帧、分帧、超帧和信号帧组成,如图1所示。
信号帧为数据帧结构的基本单元,包含帧头和帧体,由PN序列组成帧头,帧体包含3 780个符号,其中有3 744个符号数据,36个符号系统信息。
超帧包含首帧和信号帧,首帧为第一帧,共有255个信号帧,信号帧号(FN)被编码到当前信号帧的帧同步PN序列中。
分帧是由480个超帧构成。
日帧是帧结构的顶层,由1 440个分帧组成,以24 h为周期进行复位。

图1 DTMB数据帧结构图
2 组合定位系统
因DTMB协议中依据绝对时刻划分信号帧,且电视塔基站具备高精度时间同步[4-5],可采用圆周定位法作为DTMB的定位方法,通过对DTMB信号的捕获和跟踪,获得伪距测量值。DTMB和GPS的组合系统模型如图2。
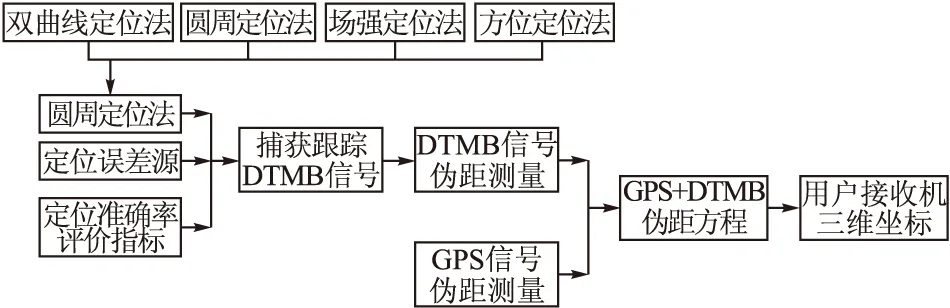
图2 GPS与DTMB的组合定位系统模型
由图2可以看出,两个组合系统中存在两个模型,即一个为DTMB系统模型,一个GPS系统模型,在进行伪距测量过程中,不同系统间存在时间差,因此在组合定位前,需对两个定位系统时间进行同步,其组合定位方程可表示为:
式中:(xu,yu,zu)表示目标用户坐标;(xi,yi,zi)表示GPS卫星坐标;(xD,yD,zD)表示DTMB基站坐标;ρi表示GPS测量的伪距,ρD表示DTMB测量的伪距,bu表示GPS系统时间与用户接收机本地时钟的误差;bD表示DTMB系统与GPS系统的时间差。
系统状态方程可表示为:
(2)
为了真实地反映运动模型特性[9],文中利用Singer模型进行仿真,但为了方便仿真,采用运动目标在y方向为Singer模型,在x方向为匀速运动模型,且x和y方向上的运动独立,关键参数表示如下:

系统观测方程可表示为:
(3)
其中,以编号1的基站为参考基站,h(Xk)表示n个基站的TDOA观测矩阵;(xu,yu)表示目标的位置坐标;(xi,yi),i=1,2,…,n表示参与定位的n个基站的坐标。h(Xk)表示如下:
3 EKF和PF算法在组合系统中的实现
依据EKF算法原理[6-8],需将非线性状态方程和观测方程通过泰勒级数展开保留一次项为线性化方程,则方程(2)和方程(3)可转化为:


(4)
利用卡尔曼滤波算法对方程(3)进行滤波跟踪,求解出目标位置,从而将非线性问题转换为线性问题来进行处理,EKF算法的计算过程为:
(5)
(6)
(7)
(8)
(9)
EKF算法因具有线性化误差或高斯噪声假定的限制,导致某些情景不合适,而PF算法[10]可以应用于任何动态状态空间模型,根据状态方程(2)和观测方程(3),可知PF算法在组合系统中的具体实现如下:

步骤三:更新权值。
将权值按下式归一化:



完成以上6个步骤的迭代计算,通过PF算法可以实现对运动目标的定位跟踪。
4 对比算法仿真结果
为了对比分析EKF算法和PF算法在GPS与DTMB组合定位系统中的动态定位跟踪效果,文中采用TDOA方法进行仿真,假定运动目标为小汽车,采用3个GPS卫星信号和2个DTMB信号进行组合定位,每隔1 s对观测目标进行跟踪,一共观测100 s,观测误差服从高斯分布,均值为0 m,标准差为30 m,NLOS也服从高斯分布,均值为500 m,标准差为200 m,运动目标小汽车的初始状态向量设定为X(0)=[4 500,14,0,12,0]T。文中在视距环境和非视距环境下对比分析定位轨迹跟踪效果,均值误差大小和标准差误差大小,如图3~图6、表1所示。
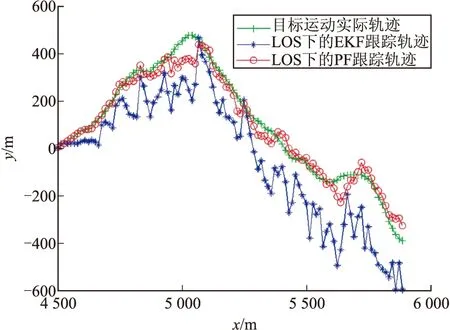
图3 LOS环境的动态定位跟踪轨迹

图4 NLOS环境的动态定位跟踪轨迹

图5 LOS环境的定位跟踪误差

图6 NLOS环境的定位跟踪误差
从仿真图3和图4可知,EKF算法和PF算法在NLOS环境和LOS环境下均能较好的沿着目标的运动轨迹对目标进行定位跟踪。当目标处于LOS环境下时,没有NLOS的干扰,但有观测测量误差的干扰,所以其运动跟踪轨迹与真实轨迹有一定的偏差,且图3表明在LOS环境中PF算法滤波后的轨迹优于EKF算法。当目标处于NLOS环境下时,同时受到观测误差和NLOS误差的影响,其运动跟踪轨迹与真实轨迹之间的偏差稍大些,但基本与真实估计轨迹接近,略有点波动,满足实际定位需求,且图4表明在NLOS环境中PF算法滤波后的轨迹优于EKF算法。

表1 EKF和PF定位跟踪误差比较表
从仿真图5、图6和表1可知,在100 s的观测时间内,NLOS环境下的跟踪误差大于LOS环境,且在NLOS和LOS环境中,PF算法均优于EKF算法。在NLOS环境中的EKF算法的均值为240 m左右,标准差为168 m左右,而PF算法的均值为41 m左右,标准差为39 m左右;LOS环境中EKF算法的均值为144 m左右,标准差为84 m左右,而PF算法的均值为30 m左右,标准差为28 m左右。
由仿真结果分析可知,在GPS与DTMB定位系统中,采用两种非线性滤波算法(EKF和PF)对运动目标进行动态跟踪时,LOS环境下的定位跟踪效果好,PF算法优于EKF算法,且NLOS环境下的定位精度满足FCC规定的定位[11]精度范围,因此成功实现了非线性滤波算法在GPS与DTMB组合定位系统中的应用。
5 结论
文中研究都市环境下基于DTMB标准和GPS标准的组合定位技术,给出符合目标运动特性的机动模型,并推导EKF算法和PF算法在组合定位系统中的实现,文中从视距和非视距两种传播环境下进行仿真验证,仿真效果说明两种环境下,采用非线性滤波算法滤波后的跟踪轨迹与真实轨迹接近,误差小,满足FCC的定位精度要求。该项研究对后续进一步深入研究基于我国DTMB标准的定位技术有一定的借鉴作用。
[1] 王军, 计晓媛, 张彧, 等. 基于中国地面数字电视广播网的定位方法 [J]. 清华大学学报: 自然科学版, 2011, 51(6): 729-733.
[2] 杨峰, 潘长勇, 宋健. DTMB与DVB-H融合技术研究 [J]. 电视技术, 2009, 33(5): 16-19.
[3] 郭宏波. 基于国标DTMB的定位系统基带处理及实现 [D]. 西安: 西安科技大学, 2010.
[4] 高志文, 陶然, 王越. 单频网数字电视广播辐射源雷达目标定位算法 [J]. 兵工学报, 2010, 31(6): 791-795.
[5] Dai Linglong, Wang Zhaocheng, Wang Jun, et al. Accurate position location in TDS-OFDM based digital television broadcasting networks [C]∥2010 IEEE 21st International Symposium on Personal Indoor and Mobile Radio Communications, PIMRC, 2010: 2621-2625.
[6] 占宏, 黎善斌, 胥布工. 基于EKF的无线传感器网络移动信标定位算法 [J]. 电视技术, 2012, 36(5): 95-98.
[7] 雷延锋, 王玫, 肖宁. 基于扩展卡尔曼滤波的非视距误差消除算法 [J]. 电视技术, 2013, 37(9): 164-167.
[8] 姚若晨. 基于开关扩展卡尔曼滤波的姿态估计 [J]. 电讯技术, 2012, 52(5): 674-679.
[9] 陈玲, 陈德煌. 多站无源定位系统中的机动目标跟踪算法 [J]. 电讯技术, 2010, 50(11): 10-14.
[10] 李善姬, 禹爱兰. 一种改进重采样的粒子滤波算法 [J]. 电讯技术,2011, 51(9): 35-38.
[11] 谢显中. 基于TDD的第四代移动通信技术 [M]. 北京:电子工业出版社, 2005.
The Application of Nonlinear Filtering Algorithm in New Integrated Positioning System
TIAN Anhong,FU Chengbiao,XU Jian,LIU Kun,XU Kunliang
(School of Computer Science and Engineering, Qujing Normal College, Yunnan Qujing 655000, China)
In view of the problem that positioning equation is nonlinear in new GPS and DTMB integrated positioning system, the dynamic tracking performance of two kinds of nonlinear filtering algorithm in line-of-sight and non line-of-sight propagation environment. The simulation shows that extended Kalman filtering (EKF) algorithm and particle filter (PF) algorithm can successfully implement in combined system, tracking effect of line-of-sight is better than non line-of-sight, the mean and standard deviation meet requirement for positioning precision in urban environment. Thus, the feasibility of dynamic positioning by GPS and DTMB signal has been verified in urban environment.
nonlinear filtering; motion model; dynamic tracking
2014-10-12
云南省科技厅青年项目(2014FD048)资助
田安红(1984-),女,贵州安顺人,讲师,硕士,研究方向:无线定位导航。
TN96
A
猜你喜欢
计算机技术与发展(2020年9期)2020-11-26
World Journal of Cardiology(2020年10期)2020-11-25
中国计算机报(2020年9期)2020-03-25
电子制作(2019年9期)2019-05-30
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
火控雷达技术(2016年3期)2016-02-06
医学理论与实践(2012年4期)2012-12-09
