大深度海水浮力调节系统研制
2015-04-18 09:34赵文德张杰赵勇王得成
哈尔滨工程大学学报 2015年9期
赵文德,张杰,赵勇,王得成
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
大深度海水浮力调节系统研制
赵文德,张杰,赵勇,王得成
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
针对大深度水下机器人升沉运动过程中耗能较大的问题,提出了一种海水浮力调节的驱动方式。针对没有大压力、小流量高压海水泵问题,研制了由低压齿轮油泵驱动海水增压泵的装置作为产生高压海水的动力源,并设计了切换阀及压力平衡阀等关键部件。为模拟大深度海洋环境,研制了外负载模拟装置,对大深度海水浮力调节系统进行了前后舱充排水同步性实验、压力-流量实验、能耗实验以及定量充排水等4个实验,实验结果验证了该系统的可行性和有效性。关键词:海水浮力调节系统;海水增压泵;外负载模拟装置;水液压;水下机器人;模糊PID控制
大潜深、长航程的无人水下机器人受重量和体积限制,自身携带的能源有限[1-2],而通常此类机器人下潜深度较大,所需时间较长,基于垂向推进器产生升沉运动消耗大量的能源。浮力调节系统与长时间工作的垂向推进器不同,其在较短的时间内通过定量排充水产生正负浮力,使水下机器人实现连续的升沉运动[3]。因此,研究基于浮力调节的水下机器人升沉运动驱动技术,对于减少水下机器人的能量消耗,具有重要的研究意义和实用价值[4-5]。
水下机器人浮力调节系统依靠吸入海水和排除海水产生下潜和上浮的驱动力,该系统的核心部件是产生大压力、小流量高压海水的驱动源,目前,国内尚无合适的高压海水泵。本文提出一种由低压齿轮油泵驱动海水增压泵的装置作为产生高压海水的动力装置,研制了切换阀及压力平衡阀等关键组成部件。为了模拟大深度海洋环境,本文还研制了外负载模拟装置,并对整个系统进行实验验证。
1 低压齿轮油泵驱动海水增压泵装置研制
浮力调节方式可分为变体积和变重量[6-7]2种。变体积中常见油囊式[8],其技术较成熟[9],但由于工作介质需自身携带,造成其自身重量及占据空间较大,且受限于高压油囊材料技术,不适合大潜深水下机器人使用。变重量式中常见的有抛载式和海水泵式:抛载式应用于水下机器人下潜或发生紧急情况时,抛掉负载后上浮,不能重复使用;海水泵式可重复使用,且其重量体积相对较小[10]。
海水浮力调节系统配置的海水泵通常要求高压力、小流量。对于本文研制的20 MPa级海水浮力调节系统而言,国外的某些高压海水泵的压力满足要求,但额定流量较大,且若在其允许的最小流量下工作,会降低海水泵的工作性能和工作寿命,不适合本文研究的要求。因此,本文提出一种由低压齿轮油泵驱动海水增压泵的装置,其原理如图1所示。
本文装置由低压油路经过海水增压泵来驱动高压水路,虽减低了系统效率,但动力源的初级为油液压泵,同时泵的压力要求减小而流量增加,增加了泵的选择范围。另外,油路中增加了可伸缩式油压补偿器,保证油路低压侧与外部环境压力平衡的同时,还可储油及减小油路脉动,使动力源更加可靠稳定地运行。本文以上述装置为基础,设计大潜深海水浮力调节系统,其充排水过程原理如图2、3中箭头方向所示。
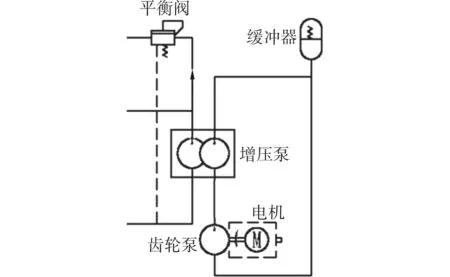
图1 系统动力源原理图Fig. 1 Schematic for system power source

图2 系统充水过程原理图Fig. 2 Schematic for system filling process
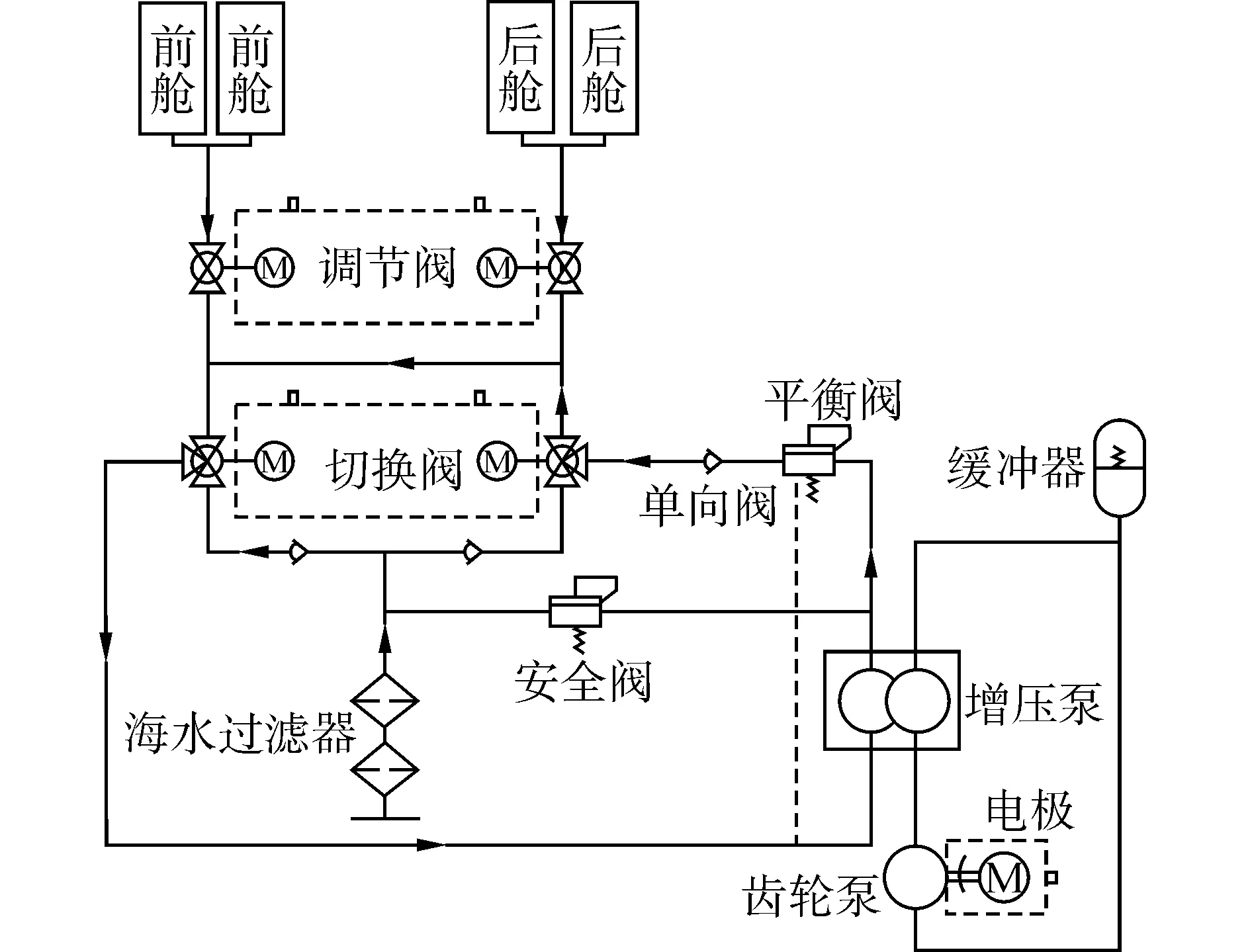
图3 系统排水过程原理图Fig. 3 Schematic for system drainage process
本文浮力调节系统中前后压载水舱可独立控制通断,利用定量的充排水,可驱动水下运载器上浮或下沉,另外,利用前后舱开关阀对水舱内水量进行调配,可实现水下运载器纵倾姿态的调整。
根据上述思路,本文提出的海水浮力调节系统主要包括压载水舱、液压集成回路以及控制舱3部分。系统实际工作时,通过控制舱发送和接受指令信息,使得液压集成回路完成阀门切换、动力源启停等动作,最终实现对压载水舱的定量充排水。作者设计了液压集成回路,其三维建模如图4所示。

1-充气阀,2-切换阀,3-安全阀,4-齿轮泵,5-过滤器,6-增压泵,7-电机,8-单向阀,9-压力平衡阀.图4 液压集成回路装配效果图Fig. 4 Assembly sketch of hydraulic integrated circuit
2 系统关键部件研制
在深海环境下工作,需满足耐高压、耐腐蚀等要求,相比油液压技术,水液压技术尚不成熟,系统所需的高压水液压元件较稀缺,因此本文对相关元件进行了研制。
2.1 切换阀及其驱动机构制
海水浮力调节系统中通常由4个两位两通电磁阀组成阀组来实现充排水过程[11],由于没有适合该系统使用的高压双向电磁阀,且电磁驱动在深海环境下的可靠性有待验证,因此本文提出用2个电动三通球阀实现充排水过程,其原理如图5所示,作者将2个三通球阀组合在一起,初始阀位调整为充水(或排水)状态,只要同步旋转一定角度即可切换成排水(或充水)状态,也就能取代4个两位两通电磁阀,实现充排水切换的作用。
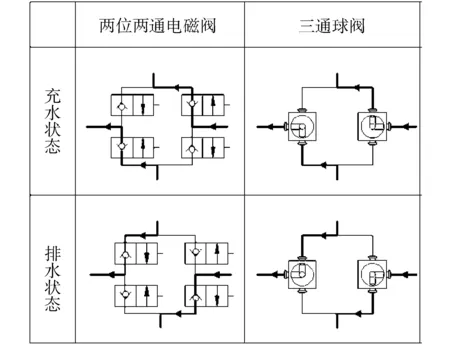
图5 切换阀原理图Fig. 5 Schematic for switching valve
由2个三通球阀组成的切换阀需要切换不同阀位才能达到充排水的作用,为此,本文研制了三通球阀切换驱动机构。
本文所选用的电动执行器为兰帕公司生产的DCL-02开关型,形状接近正六边形,最大直径为72 mm,整机重量为1.2 kg,通过内部减速机构后输出最大扭矩为18 N·m,该执行器为90°正反旋转动作且带有全开全关信号反馈,90°动作所需时间约为3 s。该型号执行器不仅尺寸适合本方案的要求同时控制简单可靠。
2.2 压力平衡阀研制
2.2.1 压力平衡阀的作用
深水环境中,浮力调节系统的换向阀处于开启状态时,压力平衡阀可防止高压海水经增压海水泵直接进入压载舱。如果切换阀不能有效地控制进入系统的海水流量,则无法控制和保证浮力调节精度。压力平衡阀通过增压泵的出水口与入水口的压力差来控制阀门的开关。如图7所示,压力平衡阀的入口M接海水增压泵的出口,压力平衡阀的平衡口N接海水增压泵的入口,增压泵产生1 MPa压力时,即压力平衡阀的入口M的压力比平衡口N的压力高1 MPa时,压力平衡阀方能开启,海水才能通过。

图7 压力平衡阀的工作原理图Fig. 7 Schematic for pressure balancing valve
2.2.2 压力平衡阀的研制
压力平衡阀需要考虑的问题主要为气蚀、高压密封、海水腐蚀、阀芯振动与噪声等问题。气蚀和气穴会影响阀芯的密封性能,减少阀的工作寿命。压力平衡阀的工作环境为外压20 MPa,需要考虑阀的密封性能。海水腐蚀后弹簧提供的力会下降,阀的开启压力精度会下降。阀芯的振动会造成阀芯表面出现裂纹,长时间工作后阀会出现泄漏,从而使阀的工作性能以及使用寿命下降。针对上述问题,本文通过采用阀芯的创新结构来解决气蚀和气穴问题、设计缓冲机构来解决阀的振动与噪音问题。
压力平衡阀高压密封有以下3处:阀芯与阀座的刚性密封、平衡口处直线动密封以及阀体与阀座的静密封。阀芯与阀座的刚性密封采用二级节流锥阀密封[12];平衡口处阀芯在阀座内作直线运动,采用格莱圈进行动密封,格莱圈的动密封使用寿命比O型圈长、摩擦阻力比O型圈小;阀体与阀座的高压密封采用O型圈端面静密封,如图8所示。
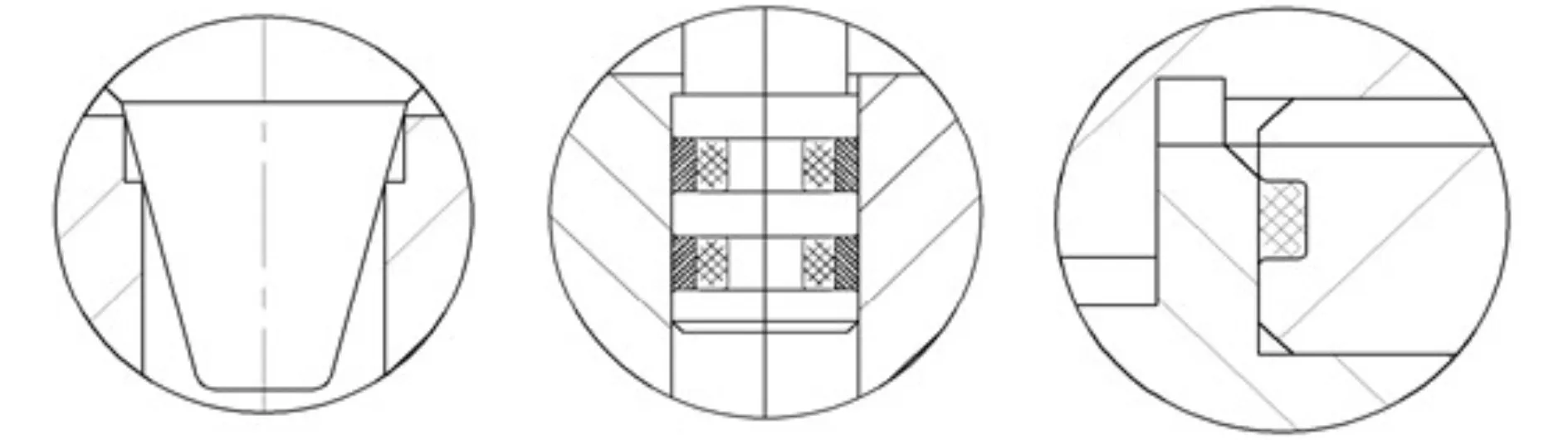
图8 压力平衡阀中的高压密封形式Fig. 8 Seal with high pressure in pressure balancing valve
压力平衡阀需要防海水腐蚀的主要有4个部分:阀体、阀芯、阀座、O形圈及弹簧。阀体、阀芯材料采用316L。阀座材料为铝青铜QAL10-4-4。铝青铜耐海水腐蚀性能优异。由于海水中的氯离子对丁晴橡胶材料的侵蚀性很强。阀门中的O形圈材料采用抗海水腐蚀性能较强的四丙氟橡胶和氟硅橡胶。弹簧采用T316不锈钢丝制成,耐海水腐蚀性能较好。
本文研制的压力平衡阀在平衡口通过格莱圈进行动密封,格莱圈的阻力会起到阻尼作用,对于压力平衡阀可以有效减小阀芯振动,增加阀芯的使用寿命,此外该阀具有限位功能和调节开启压力功能,压力平衡阀如图9所示。
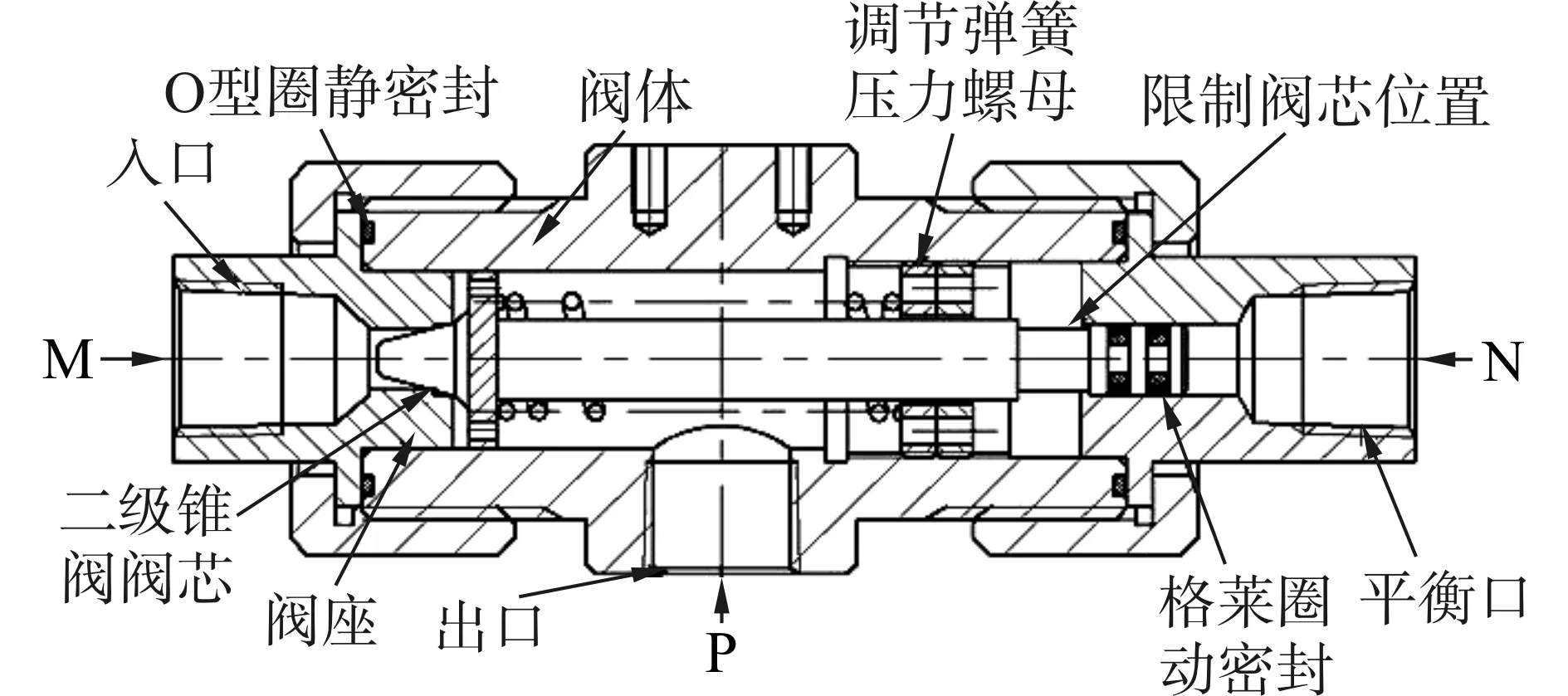
图9 压力平衡阀Fig. 9 Pressure balancing valve
2.2.3 压力平衡阀性能实验
压力平衡阀的开启压力实验如图10所示,试压泵接压力平衡阀的入口,压力校验仪经过油水转换后接压力平衡阀的平衡口。实验中,压力校验仪向压力平衡阀的平衡口加压到10 MPa,启动试压泵并使用压力传感器测量压力平衡阀的入口压力。压力平衡阀的入口压力和平衡口的压力差即为压力平衡阀的开启压力。
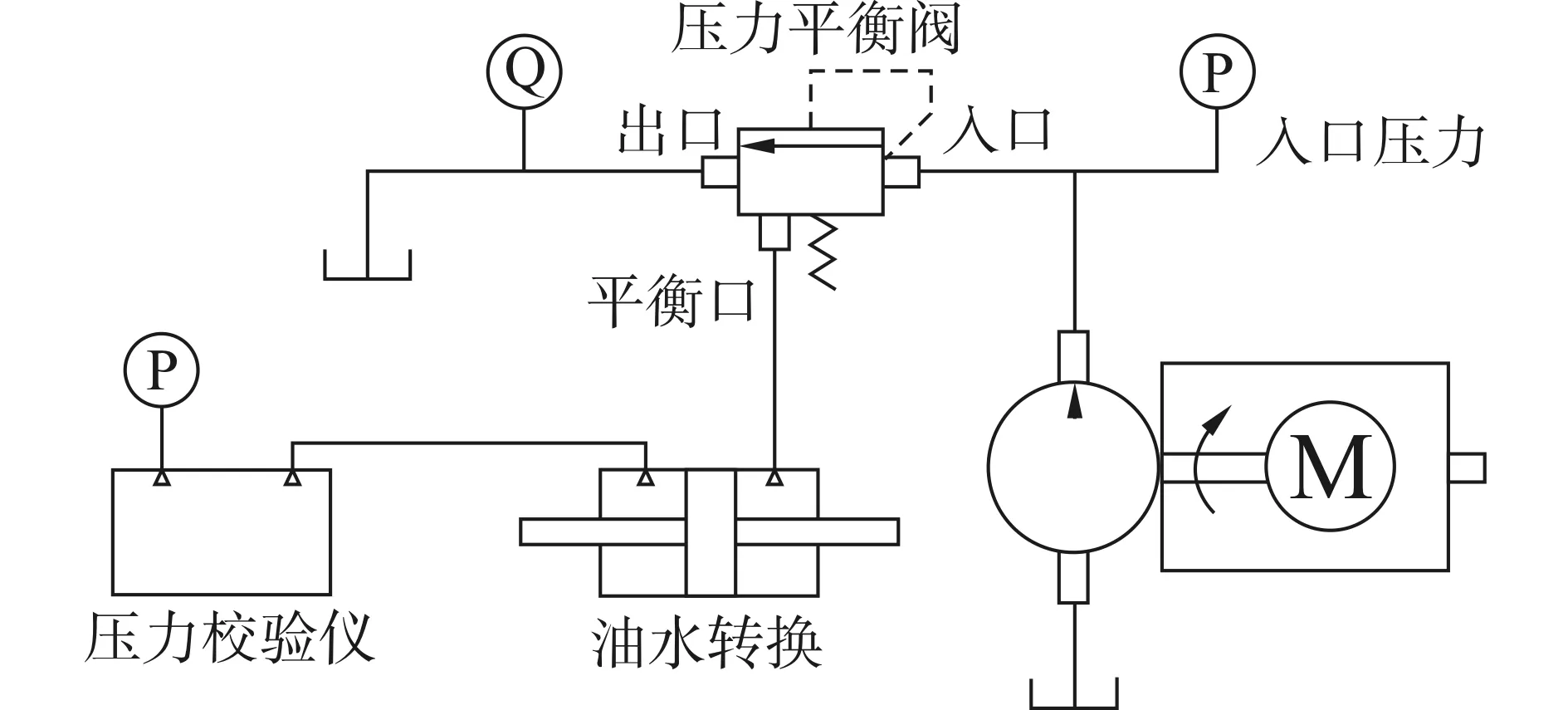
图10 压力平衡阀实验液压原理图Fig. 10 Schematic for experiment of pressure balance
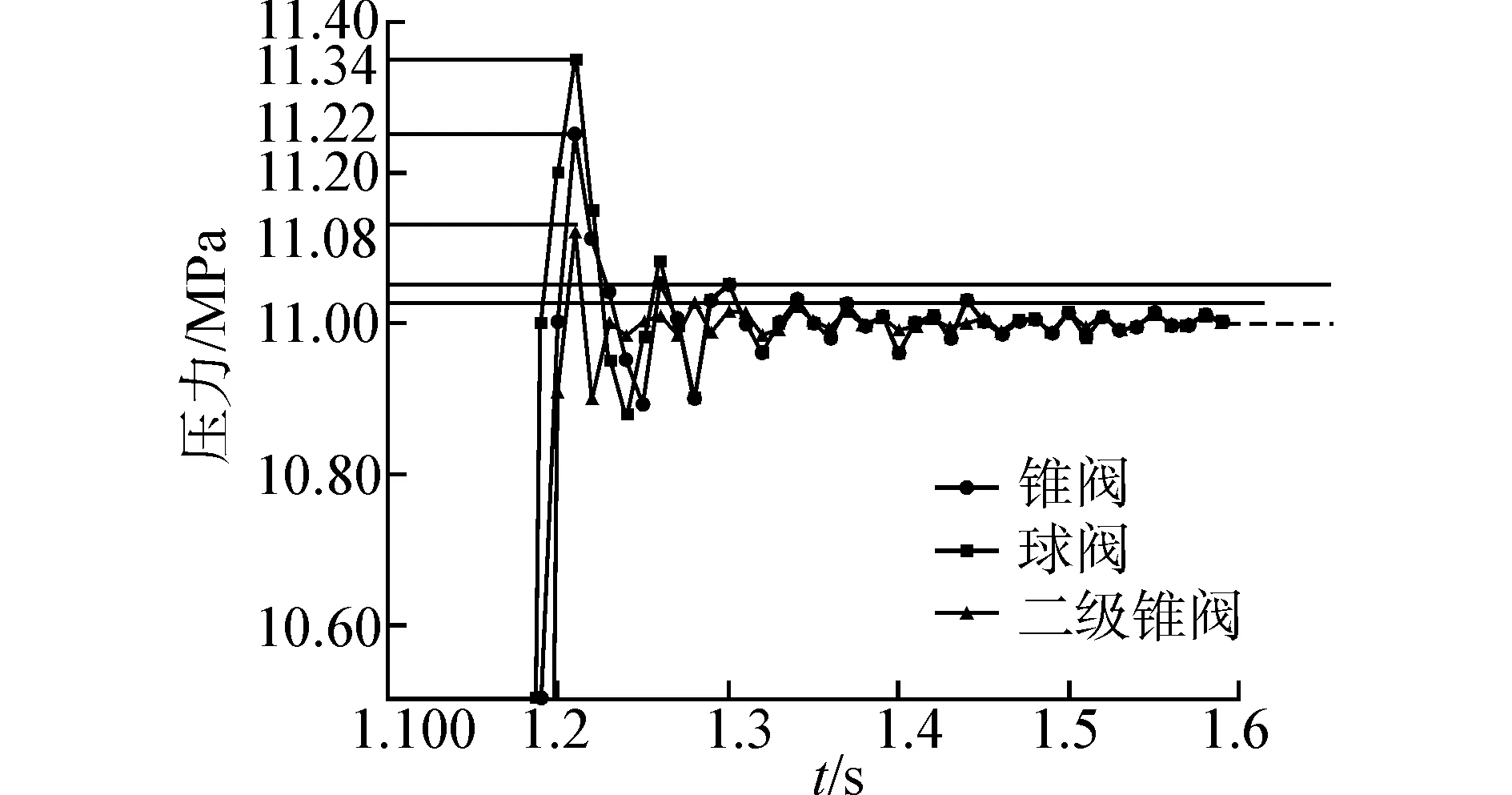
图11 不同型式的阀芯阀的开启压力特性曲线Fig. 11 Characteristics of opening pressure for different types of valve bodies
压力平衡阀的开启特性由开启压力最大超调量、响应时间以及稳态压力波动来衡量,实验结果如图11所示。二级锥阀开启压力的最大超调量为0.08 MPa,锥阀的开启压力最超调量为0.22 MPa,球阀的开启压力最大超调量为0.34 MPa。通过对比可知二级锥阀的超调量最小,相对于球阀的压力超调量减小76.5%。响应时间上,3种阀芯的结构响应时间均小于0.2 s,由于压力平衡阀响应时间对浮力调节系统影响小,因此这3种阀芯均可以满足要求。稳压后的压力波动:二级锥阀芯为0.03 MPa,锥阀芯为0.05 MPa。通过实验可以看出二级锥阀比锥阀的压力波动减小60%。压力波动越小,浮力调节系统的流量脉动越小,从而浮力调节系统的精度越高。证明二级锥阀的开启特性较锥阀与球阀要好。
3 深海外负载模拟装置研制
3.1 模拟外负载系统的作用
为模拟浮力调节系统工作时外部环境,本文研制其模拟实验系统。
本文研制的浮力调节系统采用海水作为调节介质,因此模拟负载加压系统需要能够对浮力调节系统中的水进行加压。水压加压元件在市场比较缺少且价格昂贵,因此本文采用油水转化缸这种方式来进行模拟加压,并将通过实验来验证这种系统的有效性。采用油水转换缸把水路控制转换成油路控制,这样设计的好处有两方面:1)避免了直接采用水用溢流阀控制浮力调节系统的水路压力。目前国内外做到的高精度的水介质溢流阀的压力为10 MPa,而把控制水转换为控制油巧妙的解决了水介质难以控制的问题。2)模拟实验的主要目的是模拟外部海水环境,外部的海水同一深度压力相等,而且无论是向海水排入任何体积的水,海水的压力是不变的。通过较好的控制电控溢流阀可以使得液压缸中的压力恒定不变即满足海水恒压不变。
3.2 模拟外负载系统的研制
浮力调节模拟实验系统的主要用于对浮力调节系统的出口进行模拟被动加压,浮力调节模拟实验系统加压的工作原理,充水工作过程是:油水转换缸的初始状态为水路部分充满水缸的位置在左边极限位置。液压站开启,电控溢流阀开启,此时油路压力由电控溢流阀控制。油路压力近似等于水路压力,排水过程的控制方法,电控溢流阀控制水路压力为设定值。此时模拟负载系统中的带有压力的水流向浮力调节的入口,从而实现对浮力调节系统的充水过程加压。并测量浮力调节系统的流量。
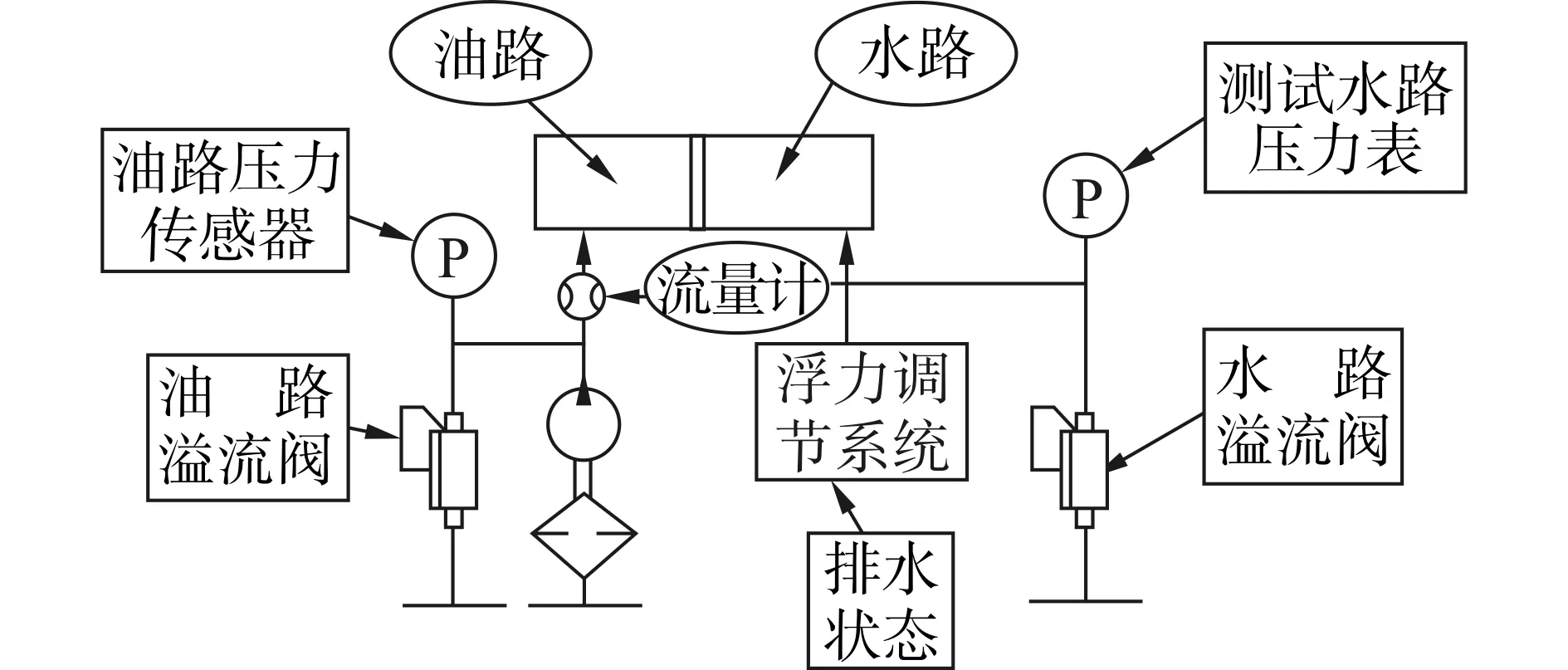
图12 模拟实验系统的原理图Fig. 12 Schematic of simulation system
浮力调节模拟实验台分为两个部分:油路和水路(如图12所示)。油路中包括液压站、自制调压溢流阀、压力传感器、流量计;水路中包括水路安全阀、水路压力表。由于控制油路压力比控制水路压力精确,油路压力与水路压力间的差距近似恒定。因此可通过控制油路压力来间接控制水路压力。
4 系统实验研究
为验证本文所提出的海水浮力调节系统的可行性和有效性,作者搭建海水浮力调节系统试验平台(如图13所示),并利用深海外负载模拟装置,进行了以下实验研究。

图13 海水浮力调节系统试验平台Fig. 13 Seawater-type buoyancy regulating system
4.1 前后压载舱同步性实验验证
系统共有前后2组水舱,每一组由2个互相连通的内径为149 mm、高为566 mm的密封耐压舱组成,每一组水舱由于距离较近连接简单,连通同步性较好,而前后两组水舱之间由于距离液压集成回路的距离不同且连接管路复杂,当前后水舱开关同时打开充排水时,就会因为两者间的连通同步性较差导致前后舱水量不同。
为了解决前后水舱连通同步性问题,在充水前将前后舱阀门均打开,向其内部充2 kPa的空气。先充水12 L,然后排水12 L,以充排水速度分别以3 L/min与4.8 L/min进行了2组实验,如图14、15所示,前后舱水量差即前舱水量减去后舱水量。
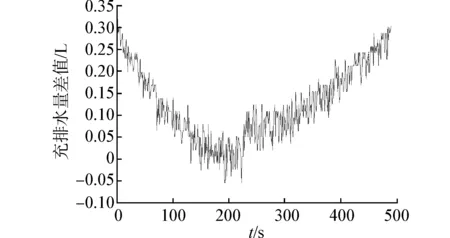
图14 以3 L/min同步充排水时前后舱水量差Fig. 14 Flow variance in fore and rear cabins in 3 L/min

图15 以4.8 L/min同步充排水时前后舱水量差Fig. 15 Flow variance in fore and rear cabins in 4.8 L/min
从实验曲线可以看出,前后舱同步充排水最大偏差发生在开始运行时,之后偏差值会随充水量的增加而减小。通常系统是以3 L/min的速度进行同步充排水,且预充至少8 L以上的水量,差值约在120 mL以内,在充排水过程中前后舱水量的最大差值约占总水量的1.5%,其表明前后舱在充排水过程中同步性较好,不会引起水下机器人的姿态变化。此外,若实际应用中差值影响较大,可以通过控制前后舱开关进行独立充排水,达到所需的精度要求。
4.2 不同压力下流量测定
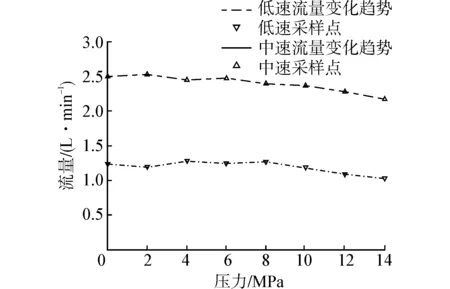
图16 不同压力下的流量变化测定Fig. 16 Flow variance in different pressures
水下机器人下潜的过程中,为了使海水浮力调节系统流量满足运行及控制的要求,作者利用模拟外负载系统研究了海水浮力调节装置在不同压力下流量的变化情况。系统流量分别设定为低速(理论流量1.5 L/min)和中速(理论流量3 L/min),连续增加外负载压力,从0 MPa起,每隔2 MPa测一组流量值,受限于模拟系统元件,最高实验压力仅为14 MPa,共得到8组实验数据,绘制成曲线如图16所示。由图16可知,系统实际流量低于理论流量,且随外压的升高,总体呈下降趋势;压力低于6 MPa时流量几乎不受影响;压力超过8 MPa后,每升高2 MPa,流量下降约5%,同时流量越大下降的幅度也越大。 由上述实验结果可知,在某一确定的控制电压下,系统的实际流量在不同压力下产生变化,随着下潜深度的增加,流量达不到使用及控制的要求。为了解决这一问题,根据以上实验结果,在控制过程中当压力的变化对流量的影响超过一定范围时,相应地改变驱动器控制电压,提高齿轮泵转速,从而提高海水增压泵的排水量,解决外部压力对调节流量的影响,使系统满足对流量相对恒定的要求。
4.3 能耗测定
浮力调节系统消耗的能源需水下机器人自身携带,进行大深度升沉运动时,能源消耗的多少对水下机器人的性能有重要影响。本文利用所研制的海水浮力调节装置,实验研究了系统的能耗情况。
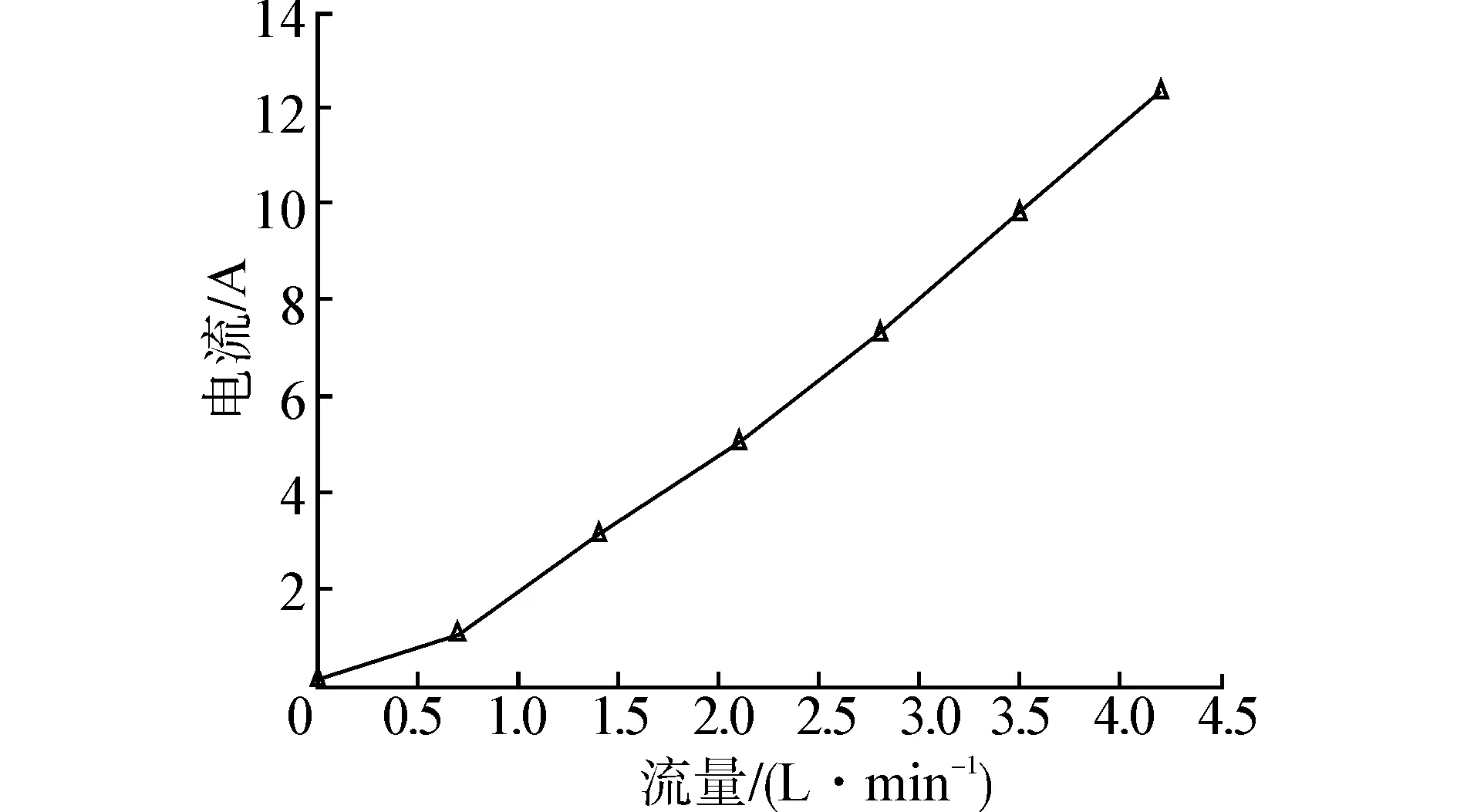
图17 无外载压力情况下电流随流量的变化Fig. 17 Flow variance vs. current without external pressure
系统以不同的流量运行,消耗的能量不同,在无负载压力的情况下,本文通过上位机控制器调节系统流量,流量每增大0.7 L/min时记录一次电流值(电压约为108 V),最高流量为4.2 L/min,得到7组数据,电流的变化曲线如图17所示,可以看出,系统待机电流较小约为0.11 A,同时在系统运行后随着流量的升高电流值整体上按线性增大。
在上述实验基础上,本文进行在一定流量下,系统能耗随压力变化的实验研究。系统流量分别设定为低速(理论流量1.5 L/min)和中速(理论流量3 L/min),利用模拟负载系统每隔2 MPa逐渐加压,记录电流值,得到了不同压力下的电流变化情况,如图18所示。由实验数据可知,随压力的增大,电流呈线性增大,流量不同时电流-压力变化总体上基本一致,线性度误差约4%。

图18 不同压力下的电流变化测定Fig. 18 Current variance in different pressures
4.4 定量充排水控制实验
为了对系统定量充排水的精度等控制性能进行研究,本文设计了PID控制器和模糊PID控制器,分别在陆地和水面进行了定量充排水实验,实验时压载舱内的初始水量为0.851 L,先充水10 L,然后再排水10 L,控制器中设置了流量的控制调节极限值为3 L/min,上位机每隔1 s收到一组液位计当前测量反馈值,同时按记事本方式分组保存,经过数据处理,本文得到系统基于一般PID控制与模糊PID控制的定量充排水的响应曲线,如图19所示。
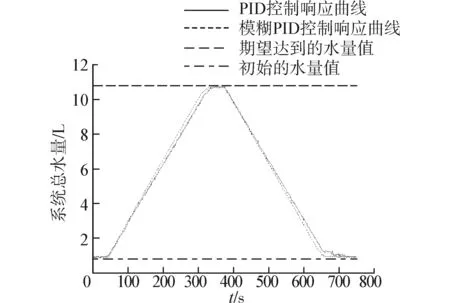
图19 基于PID与模糊PID控制的定量充排水响应曲线Fig. 19 Performances based on different methods
从图19中可以看出,两种方法的稳态误差均小于0.2 L,PID控制的相对误差为1.6%,模糊PID控制的相对误差为1.1%,都能达到±0.2 kg控制精度的要求,且两者均不存在超调。表1数据表明,控制性能指标上,模糊PID控制效果优于PID控制。
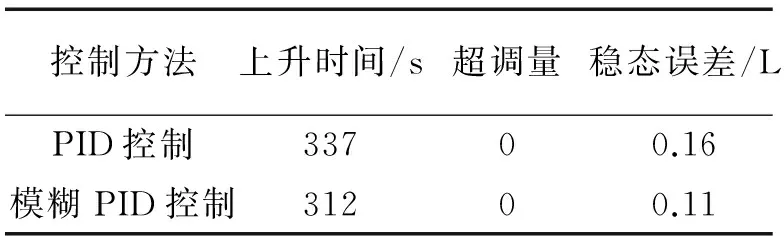
表1 系统定量充排水实验中不同控制方法的性能比较
5 结束语
针对高压海水泵和海水阀稀缺、尺寸较大等问题,本文研制了一种由低压齿轮油泵驱动海水增压泵产生高压海水的动力装置,设计了切换阀及压力平衡阀等关键组成部件,为研究大深度海水浮力调节系统中的一些技术问题提供了一种参考和借鉴的方法。此外,本文为了尽可能检验所研制海水浮力调节系统在大潜深海水环境下的运行情况,研制了外负载模拟系统,利用该模拟装置,完成前后舱充排水同步性实验、压力-流量实验以及定量充排水等实验,实验结果验证了本文的海水浮力调节系统的可行性和有效性。
[1]徐玉如, 李彭超. 水下机器人发展趋势[J]. 自然杂志, 2011, 33(3): 125-132. XU Yuru, LI Pengchao. Developing tendency of unmanned underwater vehicles[J]. Chinese Journal of Nature, 2011, 33(3): 125-132.
[2]KIMIAKI K. Overseas trends in the development of human occupied deep submersibles and a proposal for Japan’s way to take[J]. Science and Technology Trends, 2008(26): 104-123.
[3]SHIBASHI S, YOSHIDA H, HYAKUDOME T, et al. Development of the working-AUV “Otohime”[C]//OCEANS. Yeosu, 2012: 1-5.
[4]严安庆, 方学红, 杨邦清. 浅谈潜水器浮力调节系统的研究现状[J]. 水雷战与舰船防护, 2009, 17(2): 55-59. YAN Anqing, FANG Xuehong, YANG Bangqing. Primary discussion on status quo of UUV buoyancy adjustment system[J]. Mine Warfare and Ship Self-Defence, 2009, 17(2): 55-59.
[5]张铭钧. 水下机器人[M]. 北京: 海洋出版社, 2000: 1-5, 100-118. ZHANG Mingjun. Underwater vehicle[M]. Beijing: China Ocean Press, 2000: 1-5, 100-118.
[6]邱中梁, 冷建兴, 陈建平, 等. 深海载人潜水器可调压载系统研究[J]. 液压与气动, 2003(11): 9-11. QIU Zhongliang, LENG Jianxing, CHEN Jianping, et al. Research of variable ballast system in deep-sea manned submersible[J]. Chinese Hydraulics and Pneumatics, 2003(11): 9-11.
[7]陈经跃, 刘银水, 吴德发, 等. 潜水器海水液压浮力调节系统的研制[J]. 液压与气动, 2012(1): 79-83. CHEN Jingyue, LIU Yinshui, WU Defa, et al. The development of a buoyancy adjustment system for submersibles[J]. Chinese Hydraulics and Pneumatics, 2012(1): 79-83.
[8]方旭. 油囊式浮力调节装置的研制[D]. 武汉: 华中科技大学, 2012: 13-15. FANG Xu. Research on variable buoyancy device of oil bladder type[D]. Wuhan: Huazhong University of Science and Technology, 2012: 13-15.
[9]赵文德, 李建朋, 张铭钧, 等. 基于浮力调节的AUV升沉运动控制技术[J]. 南京航空航天大学学报, 2010, 42(4): 411-417. ZHAO Wende, LI Jianpeng, ZHANG Mingjun, et al. AUV heave motion control technology based on buoyancy adjusting[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2010, 42(4): 411-417.
[10]QIU Zhongliang. Design and research on a variable ballast system for deep-sea manned submersibles[J]. Journal of Marine Science and Application, 2008, 7(4): 255-260.
[11] 胡玉梅, 刘银水, 江涛, 等. 海水液压电磁阀的研制[J]. 流体传动与控制, 2012(4): 23-27. HU Yumei, LIU Yinshui, JIANG Tao, et al. Development of seawater hydraulic solenoid valves[J]. Fluid Power Transmission and Control, 2012(4): 23-27.
[12]廖义德, 刘银水, 黄艳, 等. 二级节流阀抗气蚀性能的实验研究[J]. 流体机械, 2003, 31(6): 1-3. LIAO Yide, LIU Yinshui, HUANG Yan, et al. Experimental research on anti-cavitation characteristics of two-step throttle in water hydraulic system[J]. Fluid Machinery, 2003, 31(6): 1-3.
Development of a deep-sea buoyancy regulating system
ZHAO Wende, ZHANG Jie, ZHAO Yong, WANG Decheng
(College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001,China)
Taking aim at the large energy consumption problem of underwater vehicles caused by heaving while deep sea diving, a new way of using seawater for buoyancy regulation is proposed. Improving on the existing low pressure, low flow rate, seawater pump , a new device driven by a hydraulic gear pump was developed to provide high pressure seawater. Key components such as a switching valve and a pressure balance valve were evaluated and designed. To simulate the deep sea environment, a device for simulating external pressure was developed. The feasibility and effectiveness of the deep sea buoyancy regulating system were verified by synchronous water-in/out, pressure-flow rate, energy conservation, and steady seawater flow-rate in/out experiments in the vehicle fore and rear ballast tanks.
seawater-type buoyancy regulating system; seawater pressure-boosting pump; external load device; water hydraulic; underwater vehicle; fuzzy PID control
2014-07-16.
时间:2015-07-15.
国家863计划资助项目(2012AA09A304); 国防基础科研资助项目(B2420133003).
赵文德(1964-), 男, 教授.
赵文德, E-mail: zhaowende@hrbeu.edu.cn.
10.3969/jheu.201407040
TH12
A
1006-7043(2015)09-1269-07
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.U.20150715.1728.011.html