
基于以太网通信的水下航行器远程监控系统设计
2015-05-08 11:51郑文成向先波
船海工程 2015年6期
赵 蕊,余 琨,郑文成,向先波
(1.中国舰船研究设计中心,武汉 430064; 2.华中科技大学 船舶与海洋工程学院,武汉 430074)
基于以太网通信的水下航行器远程监控系统设计
赵 蕊1,余 琨1,郑文成1,向先波2
(1.中国舰船研究设计中心,武汉 430064; 2.华中科技大学 船舶与海洋工程学院,武汉 430074)
讨论以太网Socket通信基本原理和航行器监控系统通信协议的确定,介绍便携式水面监控台和水下控制系统的功能及设计方法,完成水池试验联调,试验结果表明,基于TCP/IP的通信协议,水面监控台可以实时地完成对水下航行器的数据监视、远程遥控和半自主控制。
TCP/IP;水下航行器;监控系统
无人水下航行器因具有体积小、航行噪声低等优点,被广泛应用于打捞鱼雷、灭雷[1]、情报搜集、监视和侦察[2]等军事领域[3],同时在海上紧急搜救[4]、海洋调查[5]等民用研究领域也发挥着重要作用。对于有便携式水面监控台的无人水下航行器,监控系统起到实时监视航行器位姿、状态信息以及下达与执行控制命令的作用[6],因此必须考虑其实时性以及安全性[7]。本文主要研究基于面向连接的以太网标准TCP/IP通信协议的水下航行器监控系统,充分利用TCP/IP传输的快速性以及水下核心控制系统VxWorks的实时性,满足无人水下航行器水面和水下两级监控系统之间的实时数据通信要求。
1 实时监控系统组成
无人水下航行器实时监控系统包含便携式水面监控台和水下控制系统,两者之间数据通信基于以太网TCP/IP标准协议。无人水下航行器通过传感器获取自身位姿,状态等信息,基于TCP/IP协议通过光纤收发器周期性将位姿、状态信息传给水面监控台,水面监控台完成数据信息的接受、显示与存储。水面监控台也可实时获取监控界面的控制按钮信息,按照通信协议实时传给水下控制系统,水下控制系统通过嵌入式控制处理器PC/104堆栈进行决策,控制被控机构协同动作,达到预期的运动效果。监控系统组成见图1。
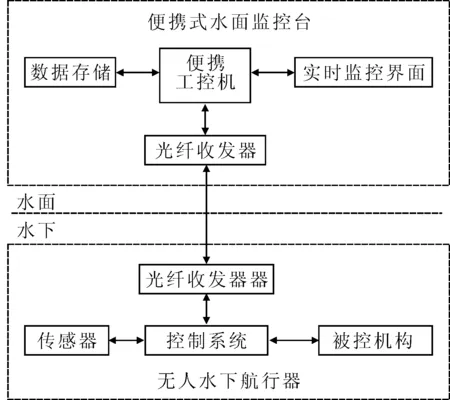
图1 无人水下航行器监控系统组成示意
具体通信数据帧按照约定协议进行交互,格式见表1。每组数据帧包含报文头,数据,校验码以及结束符,其中数据包含布尔量、整型和浮点型三种类型数据,对数据进行求和检验。

表1 数据帧格式
2 TCP/IP以太网通信协议
便携式水面监控台与水下控制系统基于TCP/IP协议进行网络通信,网络编程采取最常用的客户/服务器模式,其中水下控制器为客户机,便携式水面监控台为服务器。TCP/IP协议作为面向连接网络通信协议,其网络应用中服务器首先要调用socket建立套接字,然后用bind绑定本地地址与端口,接着进行侦听和等待连接,客户机通过connect与服务器建立连接,连接后通过调用read和write进行数据的读写,最后关闭Socket通信[8-9]。客户/服务器模式原理见图2。某一周期通信过程中,水下控制器通过write函数将无人水下航行器的位姿(经度、纬度、艏向角、俯仰角、横滚角)和状态(电池状态、电机参数、漏水检测)信息上行传给水面监控台后通过write函数将在线遥控和半自主控制命令下行给水下控制器。

图2 客户/服务器模式原理示意
3 实时监控系统设计
3.1 水面监控系统
本无人水下航行器配置的便携式水面监控台为一台工控机。Microsoft 公司推出的C++集成开发环境Visual C++,由于其良好的界面和可操作性,加上支持标准C/C++规范,在水下机器人上位机开发中得到了广泛的应用[10],利用MATLAB设计图形用户界面,MATLAB可以创建图形用户界面GUI(graphical user interface),它是用户和计算机之间交流的工具。MATLAB将所有GUI支持的用户控件都集成在这个环境中并提供界面外观、属性和行为响应方式的设置方法,而且具有强大的绘图功能,可以轻松地获得更高质量的曲线图[11],水面监控软件主界面见图3。
便携式水面监控台具备实时显示无人水下航行器的位姿和状态信息,并将这些数据信息按照原始数据格式存储于后台数据库中,便于数据分析。同时也具备对无人水下航行器在线遥控和半自主控制,其中在线遥控即是通过操纵一对舵机、开启主推电机和辅推电机这三种执行机构的单一或者组合操作实现水下航行器的水面或水下空间运动;半自主控制即水面人员通过细光缆对预编程水下航行器的作业任务(自动定深和自动定向)进行人工干预[12]。此外,还配置紧急处理按钮。

图3 水面监控界面
3.2 水下控制系统
本无人水下航行器的核心控制系统为PC/104堆栈,它配置了美国WindRiver公司开发的VxWorks实时操作系统,VxWorks是一个运行在目标机上的高性能、可裁剪的嵌入式实时操作系统[13],具有专门为实时嵌入式系统设计开发的操作系统内核,见图4。VxWorks只占用很小的存储空间,并可高度裁剪,此外具备高效的多任务管理和微秒级的中断任务循环调度,快速确定的上下文切换以及灵活的任务间通讯,保证了水下控制系统能以较高的效率运行。
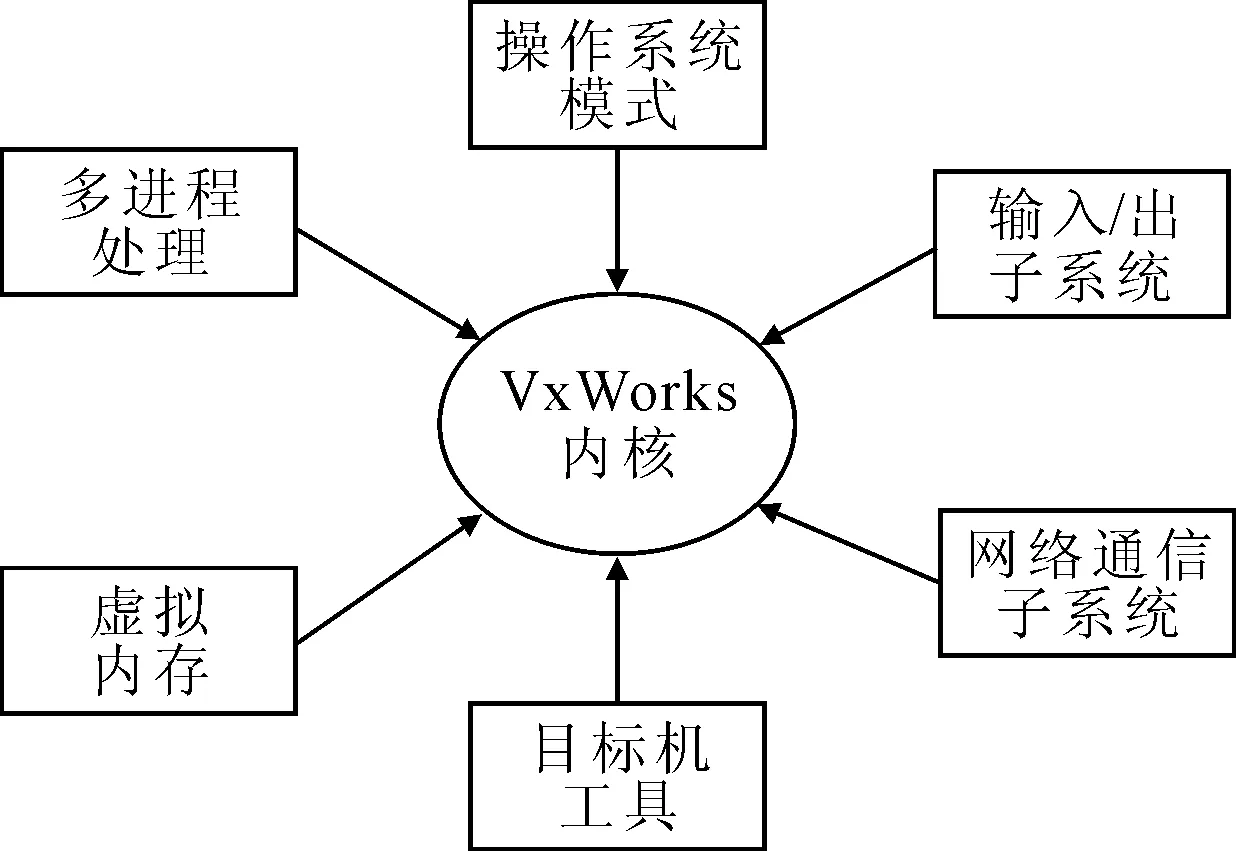
图4 VxWorks可扩展内核
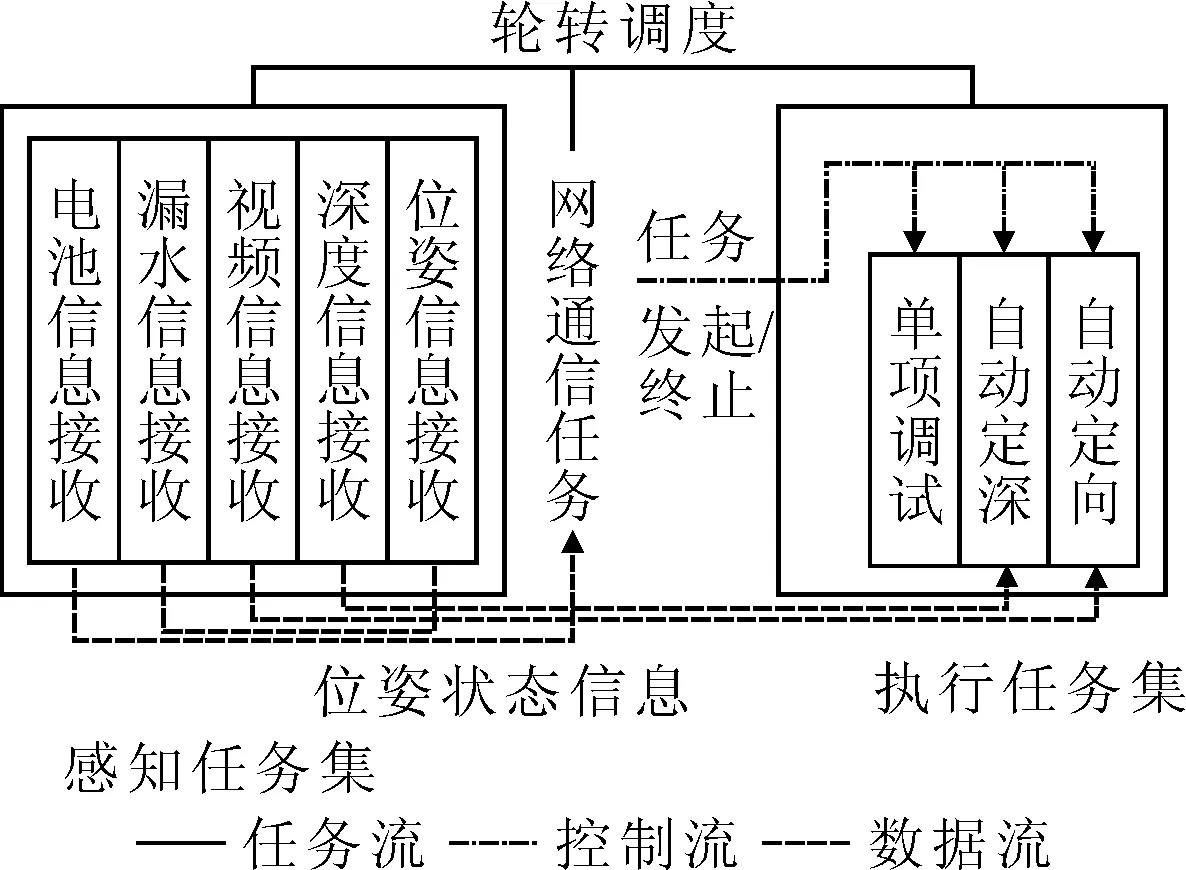
图5 水下控制系统任务调度
无人水下航行器的任务调度见图5,其中感知任务集是水下航行器控制系统获取本体自身状态和外界信息的重要途径,包含电池信息接收、漏水信息接收、视频信息采集、深度信息接收以及位姿信息接收5个任务,他们和网络通信任务之间是基于时间片轮转调度,执行任务集中的单项调试,自动定深和自动定向3个任务是通过网络通信任务发起和结束的。感知任务集获取的位置状态信息赋值给全局变量和数组中,数组信息作为网络通信任务的信息源,变量信息作为执行任务集的信息源。单项调试可完成水下航行器摄像头、动力电源开关,主推、辅推以及舵机单独或组合联动。
4 监控系统水池联调
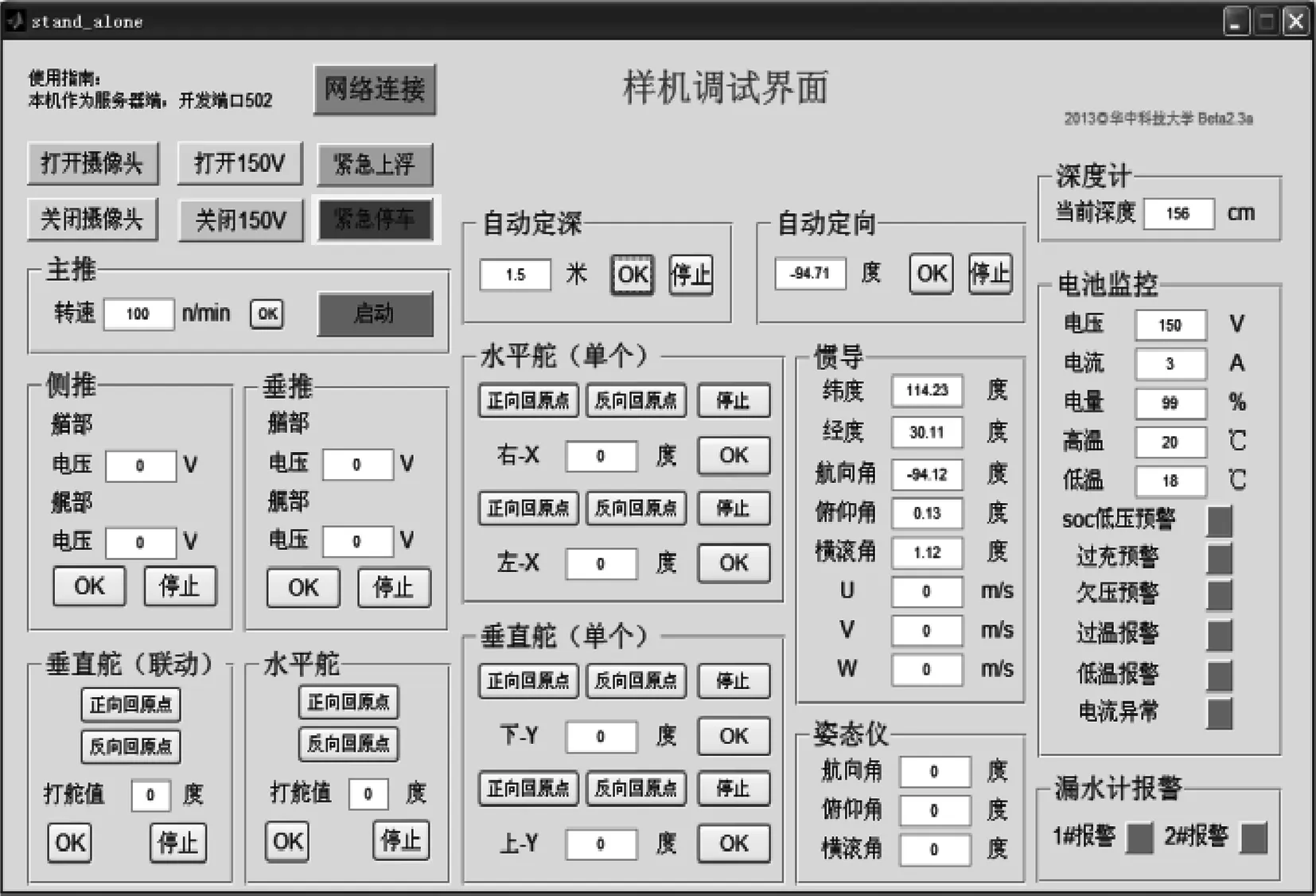
图6 无人水下航行器及水面监控主界面
无人水下航行器水池试验监控主界面见图6。在满足设计通信频率要求前提下,经过长达数月的水池功能试验,基于TCP/IP协议通信误码率较低,便携式水面监控台实时显示位姿、状态信息,采集软按钮输入信息,水下控制系统基于VxWorks操作系统的wind实时内核可实时获取水面监控台发出的在线遥控、半自主控制以及紧急人工干预命令信息,合理调度资源完成对上述紧急命令信息的处理。实际水池试验结果表明,基于TCP/IP协议的无人水下航行器监控系统数据通信实时性好,满足水面平台远程监视、遥控和半自主运动控制的要求。
[1] 徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125-132.
[2] 徐玉如,苏玉民,庞永杰.海洋空间智能无人运载器技术发展展望[J].中国舰船研究,2006,1(3):1-4
[3] 傅金祝.无人水下航行器与自主水下航行器的价值与发展前景[J].水雷战与舰船防护,2006(3):1-6.
[4] 冯 凯,严卫生,李执山,等.基于MSP430的遥控无人水下航行器控制系统设计[J].计算机测量与控制,2014,22(1):122-124.
[5] 严浙平,赵玉飞,陈 涛.海洋勘测水下无人航行器的自主控制技术研究[J].哈尔滨工程大学学报,2013,34(9):1152-1158.
[6] 罗 瑜.远程监控系统中网络通信的研究与实现[D].武汉:武汉理工大学,2006.
[7] 王建国,姜春萌,吴方良,等.水下航行体的改进S面运动控制器[J].中国舰船研究,2013,8(5):41-45.
[8] 张允刚,刘常春,刘 伟等.基于Socket和多线程的远程监控系统[J].控制工程,2006,13(4):175-177.
[9] 李 焱.PC104计算机网络通信系统设计与研究[J].微计算机信息,2007,23(12):48-49.
[10] 翟宇毅,张瑞勇.基于VC++的超小型水下机器人上位机人机交互界面设计[J].自动化与仪器仪表,2011(5):66-68.
[11] 南 洋,周 静,孟开元,等.基于Matlab的GUI的界面设计[J].石油仪器,2008(6):76-78.
[12] 徐鹏飞,崔维成,谢俊元,等.遥控自治水下机器人控制系统[J].中国造船,2010,51(4):100-110.
[13] 徐惠明.基于VxWorks的嵌入式系统及实验[M].北京:北京邮电大学出版社,2006.
Remote Monitoring and Control System of Underwater Vehicle Based on Ethernet Network
ZHAO Rui1, YU kun1, ZHENG Wen-cheng1, XIANG Xian-bo2
(1.China Ship Development and Design Center, Wuhan 430064, China;2.College of Naval Architecture and Ocean Engineering, Huazhong University of Science and Technology, Wuhan 430064, China)
The fundamental principle of Socket and determination of the communication protocol are introduced. The functions and design methods of surface monitoring station and underwater monitoring system are discussed to build the two-stage system and design the software. The system is tested in the water tank. Test results show that surface monitoring station can complete the real-time data monitoring of underwater vehicles, remote operation and semi-autonomous control.
TCP/IP; underwater vehicle; monitoring; control system
10.3963/j.issn.1671-7953.2015.06.031
2014-12-19
小型无人水下航行器样机控制系统研发 [YFA12-04-(27)68]
赵 蕊(1981-),女,硕士,工程师
U674.7;U675.79
A
1671-7953(2015)06-0134-03
修回日期:2015-01-28
研究方向:无人水下航行器总体及控制技术
E-mail: zhaorui701s@163.com
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
电子制作(2019年15期)2019-08-27
语文世界(小学版)(2019年2期)2019-02-24
电子制作(2018年10期)2018-08-04
电子制作(2018年1期)2018-04-04
电子制作(2017年17期)2017-12-18
通信产业报(2017年6期)2017-03-27
通信产业报(2017年3期)2017-03-24
电子制作(2017年24期)2017-02-02
小天使·一年级语数英综合(2014年7期)2014-06-26
