
多功能晃荡平台闭环控制系统的稳定性优化
2015-05-14 08:33程如朋吴文锋孙强刘笑
机械工程师 2015年11期
程如朋, 吴文锋, 孙强, 刘笑
(浙江海洋学院 海运与港航建筑工程学院 轮机工程系,浙江 舟山 316022)
0 引言
LNG船在海上航行时,液舱晃荡是不可避免的问题,目前,对于晃荡危害的研究国内外很多学者采用物理实验的方法,刘新立[1]曾指出当晃荡发生时,液体将对液舱结构产生强烈的冲击,甚至损坏船体结构。江苏科技大学朱仁庆[2]经物理模型试验建立研究得出液体晃荡会导致船体稳性、操纵性降低甚至液舱结构受损。因此,为防止晃荡对船舶稳性及舱壁造成的危害就必须采取相应的措施减少船舶晃荡的程度。对此,国外的P.K.Panigrahy等[3]就如何减少晃荡对舱壁的危害采用物理模型的方法研究得出,环挡板比水平挡板更能吸收冲击内壁的能量。大连理工大学的赵小西[4]采用ANSYS AQWA软件数值模拟仿真对船舶晃荡作了研究得出,液舱载况不同对船舶运动影响也不同。除此之外,日本船舶研究所、哈尔滨工程大学、上海交通大学等均对船舶晃荡进行了针对性的研究。上述研究大多采用数值模拟仿真进行研究以及模态分析,而本文则采用闭环控制系统对船舶晃荡进行一系列研究并提出优化措施,然而闭环系统存在无法预知的干扰或系统中元件参数存在着无法预计的变化以及精确度过高等问题,此种问题必然导致系统稳定性下降。
为提高闭环系统的稳定性,采取晃荡模拟平台的方法模拟海上晃荡的情况,并基于物理模型的建立和实验研究、传递函数的理论分析等,提出优化液压缸自身参数、PLC连接控制等一系列措施来提高该闭环控制系统的稳定性。
1 晃荡平台控制系统实验装置简介
本实验研究的多功能晃荡平台主要由机械主体、液压驱动系统和信号控制系统组成。液压驱动系统有液压缸、电动机及液压马达,该部分主要功能是提供晃荡动力。信号控制系统主要由PLC控制器、显控、线性位移传感器、功率放大器等构成,主要承担整个系统的输出控制及数据反馈,通过反馈信号对输出参数进行进一步修正,从而达到精确控制的目的[5]。该平台的控制流程如图1所示。
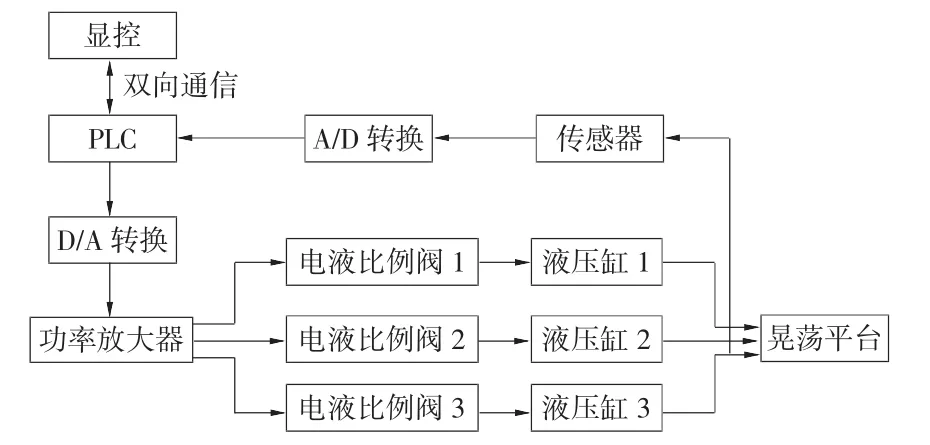
图1 闭环控制系统流程图
实验过程如下:1)首先启动电动机,电动机将带动液压马达运转,随后在显控屏上输入设定的晃荡角度、频率,显控屏与PLC控制器双向通信,并经过D/A转换后输出控制电流。2)电流信号经功率放大器放大到电液比例阀的额定控制电压,进而驱动其阀芯动作调节阀的开度,以实现控制液压油的流量和压力,驱动每个液压缸运动,推动平台的晃动。3)在晃荡过程中,位移传感器检测出液压缸活塞杆的当前位置,并将模拟信号通过A/D转换器转换反馈到PLC控制器。4)PLC控制器按照梯形图程序进行运算处理,将反馈数据与预定的值进行比较,得出偏差控制量,并将该控制量通过D/A转换经功率放大器后再次驱动电液比例方向阀节流口开度,经过多次循环控制使液压缸活塞运动到指定的值,晃荡平台晃荡到设定的角度。
2 闭环控制系统稳定性分析
2.1 非线性系统线性化分析
晃荡系统中的液压缸运动是属于典型的非线性运动,到目前为止,对于线性微分方程已具有较准确的求解方法,其研究更是相对透彻,而对于非线性微分方程的研究就相对困难。在非线性微分方程中,还需要考虑解的稳定性的问题,同时建立非线性微分方程是基于具有准确的非线性方程解,因此直接求解是很困难的[6]。从而只有将非线性系统线性化分析,是唯一一种能够较好地解决闭环系统稳定性的方法。
在晃荡装置闭环系统的控制情况下,假设PLC、传感器、液压缸控制对象的传递函数分别为 α(x)、β(x)、θ(x),则此系统失稳的充分必要条件是 α(x)·β(x)·θ(x)=-1[7]。
因此在研究时,对于晃荡平台的闭环控制系统,只需寻找出某几个特定的运动参数,测出该运动参数的极限值,若实际运动过程中,任一运动参数超过该极限值时,则该闭环系统处于失稳状态[8],必须采取相应方法予以调控。
2.2 非线性系统模型建立
本实验研究的晃荡模拟控制系统的控制框图如图2所示。

图2 系统控制框图
晃荡模拟装置接收设定值,通过放大器的作用,将值传递给电液比例阀,从而驱动液压缸的运动感,而液压缸带载运动即晃荡平台晃荡,在晃荡过程中,位移传感器检测晃荡位移并将所得值传递给PLC,经偏差比较后自动进行晃荡调节。由于存在负载,采用非线性系统线性化分析后,该系统简化的函数框图如图3所示。其中,M1(S)为放大器传递函数,M2(S)为电液比例阀传递函数,M3(S)为液压缸的传递函数,N1(S)为位移传感器的传递函数,N2(S)为PLC传递过程的传递函数[9]。

图3 系统控制函数框图
2.3 传递函数建立
PLC控制下的闭环系统可采用非线性系统线性化的方法来优化其稳定性,研究闭环系统的传递函数为。其中:G(s)是系统的开环传递函数;H(s)是系统的反馈传递函数,在本实验研究中主要是位移传感器及PLC的传递函数。首先可以得到该系统的开环传递函数为

其中:M(1S)为放大器传递函数,放大器的不稳定主要由环境温度所引起,而晃荡模拟实验的温度是相对稳定的,因此不会对实验造成影响,则令其为常系数Ka;M(2S)为电液比例阀传递函数,令其为′为常系数;M(3S)为液压缸的传递函数,令其为常系数。因此有,

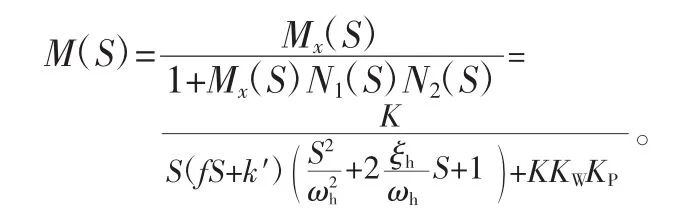
其中:KW为位移传感器的传递函数;KP为PLC传递过程的传递函数[10]。
则对该系统影响较大的因素主要集中于液压缸自身参数,包含液压缸的固有频率、液压缸的阻尼系数,而反馈元件位移传感器是相对稳定的,因此在研究中将其简化为常数KW,PLC的稳性讨论将在下文中给出,因而公式中为假设常数KP。由上文所述的理论研究,对于机电一体化自动控制系统,只需研究液压缸固有频率、阻尼系数等元素是否超过该极限值,从而判定其稳定性。
3 闭环系统稳定性优化措施
3.1 液压缸固有频率
根据文献[11]的研究可知,活塞在中间位置时,液压缸弹簧的刚度最小,液体压缩性影响最大,固有频率最低系统稳定性最差,而在两端时,液压缸弹簧的刚度最大,较中间位置稳定。在此过程中,还存在库仑摩擦等非线性负载,当采用线性化的方法分析系统的动态特性时,建立的线性分析方法主要是研究系统的稳定性,而库仑摩擦是相对稳定的,因此在该分析中可忽略不计,对实验并无太大影响。因此,为提高闭环系统的稳定性,就必须提高活塞在中间位置时的固有频率。提高液压缸的固有频率方法有[11]:
1)增大液压缸活塞面积A。液压缸活塞的面积主要由负载决定,本实验负载要求比较小,同时本晃荡装置是采用多自由度晃荡平台,根据(ωh表示液压缸活塞频率,βe表示等效容积弹性模数,Vt为运动过程总流量),在同样的负载速度下,所需负载流量增大,则液压缸控制晃荡装置的输出流量就越大,即在一定范围程度内增加A,其固有频率就增大,在这种状况下,液压缸的稳定性就得到优化,从而使得整个系统的稳定性提高。
2)将比例阀和液压缸组合于系统中。若将比例阀和液压缸装在一起,则在这种情况下,可减小传递过程的能量损失,也可以减少总压缩容积,减少传动的位移。从而提高固有频率,此种方法在晃荡装置的控制中是切实可行的。
3)将晃荡装置的连接软管改换成橡胶管,此种方法可减少空气的进入,在一定程度范围内提高了油液的有效体积模量βe,增大其固有频率,同时无空气流入将减少液压缸的频率损耗,从而减少晃荡过程中传递到晃荡平台的能量的损失,提高整个晃荡装置的稳定性。
3.2 液压缸的阻尼系数
3.3 PLC连接位移传感器对系统稳定性的影响
闭环系统的传递函数式(2)忽略PLC对晃荡系统的影响,但由于系统传递的PLC参数仍旧在变化,特别是在晃荡装置此种状态一直改变的装置中,这种影响更大,因此PLC对系统稳定性必须做出一番讨论。实验研究晃荡平台的反馈主要是由位移传感器获得的,由于这种传感器在传递过程中存在较大的漏电流,而PLC的操作是基于电流控制之上的,因此由于存在的漏电流会对PLC造成一定的影响,使得PLC存在误操作,使整个系统的稳定性下降。因此对于本实验而言,提高PLC系统稳定性的方法主要有:1)从电路中考虑,可直接在位移传感器和PLC之间串联一个电阻,以减少漏电流的传送[12]。2)从传递中考虑,将电路分成两路,每路串联一个电流计及限流装置,若电流超过一定限值时,限流装置即可监测到,并将该路电流断开,因而传递到PLC上的电流减少,同时减少了由于电流导致的PLC误操作,从而在一定程度上提高了系统稳定性。
3.4 在可控范围内降低位移传感器的灵敏度
由于灵敏度越高,元件对周围的变化就越敏感,因此周围环境一旦发生细微变化,位移传感器便会被监测到并采取误操作,导致整个系统的稳定性变差。对于本实验研究的多功能晃荡装置而言,只需测定在某个过程内所需要的位移,传递到PLC中,与比较系统进行比较,从而带动控制系统采取控制行为。因此,对位移传感器监测的灵敏性要求并不是太高,可在可控范围内降低位移传感器的灵敏度。
4 结语
晃荡装置闭环控制系统易受外界的干扰,使其稳定性变差,同时导致测得实验结果的准确度下降。晃荡不均以及频率偏差的存在是该闭环控制系统稳定性差的主要因素,本文通过对PLC控制的闭环系统进行数学建模并进行实验研究,将非线性化的系统进行线性化分析,得到改善闭环系统不稳定性的一系列措施,使得运行过程中由于自身频率、阻尼变化、PLC的误操作以及位移传感器的灵敏度而导致实验稳定性下降的概率减少,晃荡试验研究结果精确度大幅提高。因此,研究晃荡平台闭环系统的稳定性,可解决工业中类似闭环系统不稳定性问题,为实际应用提供更大的参考价值。
[1] 刘新立.船舶液体晃荡载荷特性研究[D].武汉:武汉理工大学,2009.
[2] 朱仁庆,马海潇,缪泉明,等.LNG船液舱晃荡压强预报[J].船舶力学,2013,17(1-2):42-48.
[3] PANIGRAHY P K,SAHA U K,MAITY D.Experimental studies on sloshing behavior due to horizontal movement of liquids in baffled tanks[J].Ocean Engineering,2009,36(3):213-222.
[4] 赵小西.液舱晃荡及其对船舶运动的影响研究[D].大连:大连理工大学,2014.
[5] 王剑楠.船舶液舱晃荡模拟系统研发[D].舟山:浙江海洋学院,2014.
[6] GU Xudong,ZHU Weiqiu.Time-delayed stochastic optimal control of strongly non-linear systems with actuator saturation by using stochastic maximum principle [J].International Journal of Non-Linear Mechanics,2014,58:199-205.
[7] 程俊斌,杨文刚.基于数值仿真的时域内人-机闭环系统稳定性研究[J].飞机设计,2012,32(5):40-42,55.
[8] KIM Y.A numerical study on sloshing flows coupled with ship motion-The anti-rolling tank problem [J].Journal of Ship Research,2002,46(1):52-62.
[9] 李勇,于韶辉.电液比例阀的双闭环控制技术[J].微特电机,2005(6):35-36.
[10] YANG Jin.Efficient tool for complex optimization problems:beecolony optimization algorithm[J].Application Research of Computers,2010,27(12):4410-4413.
[11] 韩江,肖扬,夏链,等.新型伺服液压机泵控液压缸液压伺服系统的建模与仿真[J].液压与气动,2011(10):12-15.
[12] 夏利民.浅谈如何提高PLC控制系统的稳定性[J].科技风,2013(20):36.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
测控技术(2018年7期)2018-12-09
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
光学精密工程(2016年4期)2016-11-07
石油化工建设(2015年6期)2015-12-01
电测与仪表(2015年3期)2015-04-09
电测与仪表(2014年11期)2014-04-04
