
散斑技术在激光寻的制导武器仿真系统中的应用
2015-05-29 09:19许亚娥
应用光学 2015年3期
韩 刚,许亚娥,沈 阳,王 进,王 森
(西安北方光电科技防务有限公司 计量检测中心,陕西 西安710043)
引言
通过近些年来的局部战争,尤其是海湾战争和科索沃战争,人们清楚地看到,精确制导武器在战争中所起到的作用越来越重要,其拥有程度和运用能力也已经成为衡量一个国家军事现代化程度的重要标志之一,它会同电子战、军事指挥自动化系统构成了现代战争的3大支柱[1]。
激光寻的制导武器属于有源精确制导技术的一种,大致分为激光半主动寻的制导武器和激光主动寻的制导武器2大类[2]。激光半主动寻的制导武器是指由弹外的激光目标指示器与弹上的激光寻的器(也叫激光导引头)2部分组成,是目前世界各国应用较广的一种制导模式,尤以美国的“铜斑蛇”和前苏联的“红土地”最具代表性[3]。
在现实生产和科研过程中,建立调试产品的仿真模拟系统,即模拟产品在野外作战的实际环境:如弹体飞行的姿态、大气环境(阴天、晴天、雨雾、地物杂波等)等背景对产品性能干扰的影响是必要的,而激光指示器作为整个制导过程中(从搜索发现、锁定目标、跟踪目标到击中目标全过程)重要的组成部分[2],其仿真系统的研制与调校显得尤为重要。文中则主要介绍激光半主动寻的制导武器,并以激光半主动寻的制导炮弹为例,在总结实际工作经验的基础上,创新性地利用激光散斑技术就如何正确调校激光半主动寻的制导武器仿真系统中的光学系统进行了研究和分析。
1 散斑技术
1.1 散斑的形成原理
当一束激光射到物体的粗糙表面(例如铝板或者钢板等)上时,在粗糙表面前的空间将布满明暗相间的亮斑与暗斑;若再放置一张纸屏于粗糙表面前,会更明显地看到这一现象,这些亮斑与暗斑的分布是杂乱的,故称散斑(speckle)。不论将纸屏放置于远处或者近处,都可以看到这一现象,这表明粗糙表面前的整个空间都布满着散斑,仅在纸屏靠近粗糙表面时,散斑较小,远离粗糙表面时,散斑较大。若所用的是光滑表面,则入射光线被该表面反射时,不能形成散射,所以在纸屏上将看不到散斑。若所用的虽然是粗糙的表面,但是入射的不是激光,而是白光或者钠光,这时虽然发生散射光,但是由于光线并不发生相干,如图1所示。会聚到P点的各散射光不发生干涉,即不会形成亮斑与暗斑。上述现象可以看出,要形成散斑必须具有2个条件:1)必须有能发生散射光的粗糙表面。为了使散射光较均匀,粗糙表面的深度必须大于入射激光的波长;2)入射光线的相干度要足够高,例如使用激光。当激光射到毛玻璃上时,因为符合以上2个条件,所以在毛玻璃后面的整个空间充满着散斑[4]。
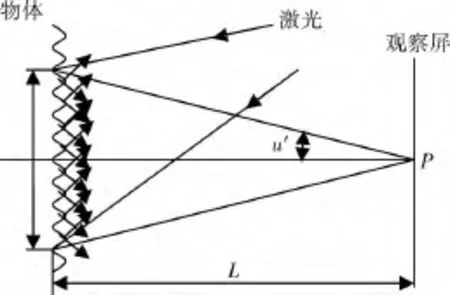
图1 客观散斑的形成Fig.1 Formation of objective speckle
1.2 散斑的大小
如上所述,散斑是相干光照明时,粗糙表面各个面积单元上散射光波之间干涉在空间域内形成的颗粒状结构,如图2所示。颗粒状的大小,可用它的平均直径来表示,而颗粒尺寸的严格定义是2个相邻的亮斑间距离的统计平均值。此值由产生散斑的激光波长λ及粗糙表面圆形照射区域对该散斑的孔径角u′所决定的,即[4]:

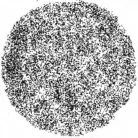
图2 激光散斑(斑纹)图Fig.2 Speckle picture(striped pattern)
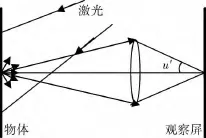
图3 主观散斑的形成Fig.3 Formation of subjective speckle
(1)式说明散斑的大小粗略的对应于干涉条纹间隔,而后者是由形成散斑的光瞳直径两端的光波产生的。当照明区域为圆形时,散斑亦为圆形。当照明区域增大,那么有更多的面积元上散射的光波参加干涉,所以散斑的分布变化了,而且由于照明区域对该散斑的孔径角u′增大,所以散斑变小了。
上述散斑是由粗糙表面的散射光干涉而直接形成的,称为直接散斑。若经过一个光学系统,在它的像平面上形成的散斑,就称为成像散斑。因为这也是肉眼对焦于被照明的粗糙表面时所看到的散斑,所以,亦称为主观散斑,如图3所示。
在图3中,成像平面上P点的散斑直径决定于光组出射光瞳对P点的孔径角u′,即

式中NA为光组的数值孔径[4]。
(2)式说明孔径角较小时(即按照几何光学成像理论,说明形成成像散斑所在光学系统中,正透镜的曲率半径较大,对于光线的汇聚能力较弱),散斑较大,反之亦然。
1.3 散斑的光强分布
以完全相干的激光照明粗糙面时,其散射的位相是无规则的分布在0~2π之间,而且都偏振在同一平面内。在理论上可推导出这些散斑分布的概率密度函数[4]为
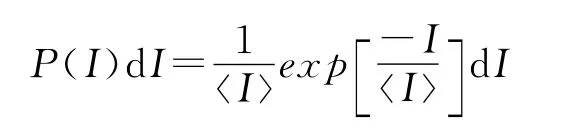
式中:P(I)dI为散斑强度在l与(l+dl)之间的概率密度;〈I〉为散斑强度的概率平均值。
这种杂乱无章的随机散斑图,称为正常散斑图,其强度分布为负指数概率密度函数,如图4所示。由图4可见最可能出现的强度是接近于零的,即黑散斑比其他强度的散斑都要多。
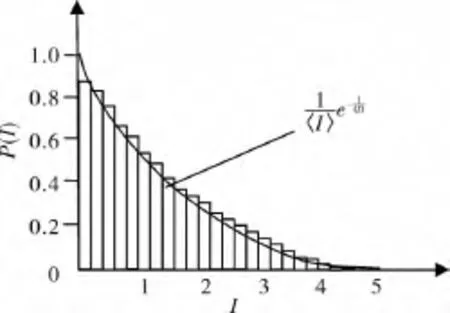
图4 散斑场强分布的概率密度函数Fig.4 Probability density function of speckle field strength distribution
综上所述,散斑是由粗糙表面或者散射介质的散射所形成的,所以,也可以说散斑是粗糙表面的某些信息的携带者。这样,借助于散斑不仅可以研究粗糙表面的本身,而且还可以研究它的形状与位置的变化。因此把获得这些信息的各种实验技术统称为散斑技术。
而在激光半主动寻的制导武器(炮弹或炸弹等)科研或者生产所用的仿真模拟系统中,创新性地利用激光散斑技术,对于光学仿真系统进行调整和校准,其原理如下[5]:
1)激光半主动寻的制导武器所用指示光源为单色性非常好的脉冲激光光源。
2)整个作战系统中,弹体寻的器中的光电接收元件所接收到的光信号是由目标表面经过漫反射而形成的激光散斑。
3)为了提高抗干扰能力和在导引头视场内出现多个目标时也能准确地攻击指定目标,在激光目标指示器中有编码器,射出的是经过编码的激光束,经过目标表面反射,将含有特定编码的激光束会聚到激光寻的器上,形成制导过程所需的指令,即激光在空间传输并作为携带者,间接地把目标的某些信息输送到信息接收与处理系统,实现对目标的搜索、跟踪等制导过程。
4)弹体在整个飞行制导过程中,随着弹目之间距离的变化,其相对光斑直径和接收的激光能量也在不断发生变化。
2 激光半主动寻的制导系统的制导原理
激光半主动制导武器系统由发射装置、制导炮弹和激光目标指示器等组成。弹体上的寻的器主要由光学系统、探测器和电子设备(微处理器)等组成。其中探测器采用四象限或者八象限(内四象限和外四象限)阵列。
激光目标指示器可以是地面的或机载的,但在炮弹、炸弹等发射后必须一直照射目标。如果寻的器接收到从目标反射的激光能量,由光学系统会聚到探测器上(以四象限探测器为例),形成一个近似圆形的激光光斑(激光散斑),经信号处理(如图5所示)可得到俯仰和偏航2个通道的误差信号为[6]

式中IA、IB、IC、ID分别为4个象限接收到的激光功率。

图5 四象限探测器的信号处理过程Fig.5 Signal process of four-quadrant detector
炮弹、炸弹等发射后,首先按照弹道飞行,在距离目标3km时,弹上寻的器四象限探测器接收到激光回波编码信号,得到寻的器光轴与弹目连线之间的角误差,产生进动力矩进行小回路跟踪控制[7];根据导引头输出的视线角速度,形成舵控指令,实现比例导引。
3 仿真系统的光学系统分析
根据上述激光半主动制导系统,一般来讲,对于激光半主动制导仿真系统,其功能实现必须具备以下几点[6]:
1)控制激光光斑尺寸的大小。
2)控制激光能量受大气影响和距离的衰减。
3)控制二维投射器和弹目相对位置。
4)通过激光调制器模拟大气扰动引起的激光闪烁。
仿真系统的光学系统结构设计示意图如图6所示,其中最为重要的是图6中的4(毛玻璃)和5(光栏),由于是仿真系统,则毛玻璃所起的作用就是模拟激光目标指示器指向被攻击目标时,由于目标表面的不平整(粗糙表面)而产生漫反射,从而形成激光散斑。弹上寻的器以球形整流罩封装于弹头的前端,接收自目标反射的激光,测得飞弹运动的方向与目标视线方向的偏差,并输出相应的误差信号。它包括激光接收系统、光电探测器和处理电路等。为方便探测目标和减少干扰,寻的器通常有大小2种视场[8]。大视场(一般为几十度)用于搜索目标;小视场(一般为几度或更小)用于对目标进行跟踪。一般情况下,以平面角度时这个范围为±30°左右,有的则达到±65°。而对于一般的激光半主动制导炮弹来讲,其跟踪范围为±12°左右[9]。
当瞄准目标后,目标指示器发射编码脉冲激光束来照射目标,随即发射激光制导飞弹,飞弹在飞行中由其头部的寻的器接收来自目标反射的激光信号,经光电转换、解码、放大和运算,得到误差信号,驱动执行机构不断修正航向,直至击中目标。
一般军事目标(战车、舰船、飞机、碉堡等)对照明激光束的反射率与观察方向有关,故通常存在一个以目标为顶点,以照明光束方向为对称轴的圆锥形角空域。激光制导的飞弹必须投入此角空域内,寻的器才能搜索到目标,此角空域被俗称为“光蓝”[9]。目标表面越光滑,则“光蓝”开口越小,飞弹被投入光蓝越困难,而探测距离越远(因为依据几何光学定律,对于表面越光滑的目标,其反射回来的激光束越规则,而且激光能量损失越小,当飞弹导引头所用光电探测器相同时,其探测灵敏度也相同,则对于反射回来激光能量或功率损失小的目标探测的距离就越远)。目标表面若是粗糙,则情况相反。

图6 仿真系统中脉冲指示激光模拟光源的光路结构示意图Fig.6 Optic path of pulse-indicated laser-imitated light source in simulation system
4 散斑技术在仿真系统中的应用
以下一组图形(图7)中,图7(a)为在上述光学系统(图6)中准值物镜6相对于其焦点位置进行前离焦或者后离焦时,从红外平行光管中观察到的激光散斑的斑纹。图7(b)为准值物镜6位于其焦点位置时,从红外平行光管中观察到的激光散斑汇聚为一个很亮的光点。图7(c)为准值物镜6位于其焦点位置附近较小距离时,从红外平行光管中观察到的激光散射后形成的“日冕”现象(一般也称为夫朗和费环)。图7(d)为在上述光学系统(图6)中去掉准值物镜6时,从红外平行光管中观察到的激光散斑干涉现象。

图7 准值物镜相对其焦点前、后不同位置所对应的激光散斑的斑纹Fig.7 Patterns of laser speckles on different positions in front and back of focus in collimation objective
利用上述原理对仿真系统激光光斑进行调试时,也可根据其制导全过程及寻的器大小视场的不同,将激光光源的辐射照度值划分为大能量和小能量2种情况分别进行调试和校准,即:
1)当弹体距离攻击目标较远时,弹体处于目标搜寻阶段,此时寻的器处于大视场,但是在此空域中形成散斑的激光能量较小,加之大气传输的影响,其光电接收装置接收的激光辐照度值就小(小能量),根据主观成像散斑的特性,此时孔径角较大,散斑直径较小。
2)当弹体距离攻击目标较近时,弹体处于目标锁定跟踪阶段,此时寻的器处于小视场,在此空域中形成散斑的激光能量较大,并受大气传输的影响较小,其光电接收装置接收的激光辐照度值就大(大能量),根据主观成像散斑的特性,此时孔径角较小,散斑直径较大。
3)对光学仿真系统中不同状态下激光散斑的直径大小进行调试和校准时,还应考虑产品的实际结构设计情况,由于考虑到寻的器接收单元的技术特性和弹体在飞行过程中的稳定性,一般来讲,在设计时,寻的器接收单元的光敏面一般处于其光学系统焦平面之前的位置,即前离焦。原因是:1)可以减小整个寻的器的结构尺寸;2)避免由于在焦平面激光能量会聚太大而击穿接收单元;3)避免由于在接收单元光敏面上光斑直径太小而引起弹体在整个飞行过程中(搜索、跟踪目标的过程中)产生剧烈的抖动,从而影响其制导精度。因此用红外变相管(红外平行光管)对激光散斑的直径大小进行调试和校准的过程中,当沿光轴方向移动成像透镜时,在视场中会看到有2个满足光斑直径的激光散斑,一个是由于光线会聚产生的,一个是由于光线发散而产生的,根据上述分析,应该选择略微发散的激光散射斑纹。
5 结束语
综上所述,在充分分析目前国内外在激光制导武器方面发展的现状,并以激光半主动寻的制导武器(炮弹、炸弹)的制导模式为例,针对科研生产过程中产品调试等所用仿真系统现状研究的基础上,创新性地提出了利用激光散斑技术对仿真系统中光学系统进行调试和校准的思路。该方法快捷有效,从理论上实现了仿真与实际工作环境的一致性,经过生产实践和实际靶试验证是完全可行的[10],具有一定的现实意义和参考价值。
[1] Guo Xiuhuang.Precision system guided technique[M].Beijing:Defence Industry Publisher,1999.郭修煌.精确制导技术[M].北京:国防工业出版社,1999.
[2] Zhang Peng,Zhou Junhong.Precision system guided theroy[M].The Electronics Industrial Publisher,2009.张鹏,周军红.精确制导原理[M].北京:电子工业出版社,2009.
[3] Gao Binglong.The precision makes development trend and its characteristics of leading the weapon[J].Machine and Electric Technique,2014(02):158-160.高炳龙.精确制导武器的发展趋势及其特点[J].机电技术,2014(02):158-160.
[4] J.C丹蒂.激光斑纹及有关现象[M].黄乐天,译.北京:科学出版社,1981.
[5] Liu Xingtang.Guided missile system control analysis,design with imitate really[M].Xian:Northwest industrial university publisher,2006.刘兴堂.导弹制导控制系统分析、设计与仿真[M].西安:西北工业大学出版社,2006.
[6] The national defense science and technology and quality department.Calculate Training Teaching Material-The Quantity Calculate[M].Beijing:Atomic Publisher,2002.国防科工委科技与质量司.几何量计量[M].北京:原子能出版社,2002.
[7] Mu Rangxiu.Implementation of pulse peak holding circuit based on laser spot tracber[J].Journal of Applied Optics,2013,34(6):1047-1050.穆让修.基于光斑跟踪器的脉冲峰值保持电路的实现[J].应用光学,2013,34(6):1047-1050.
[8] Zhang Wenpan,Liu Yanfang,Yin Ruiguang.Lead weapon interference effect to imitate to really evaluate a standard preliminary study to the laser precision system[J].Infrared and Laser Engineering,2013,42(03):900-903.张文攀,刘艳芳,殷瑞光.对激光精确制导武器干扰效果仿真评估标准初探[J].红外与激光工程,2013,42(03):900-903.
[9] Zhou Fengqi.Optics system guided technique general[M].Xian:Northwest Industrial University Publisher,2002.周凤岐.光学制导技术概论[M].西安:西北工业大学出版社,2002.
[10]Liang Wei.The precision makes to lead weapon development and its key technique[J].Thermodynamic Power and Conductor Control,2008,33(12):5-7;12梁微.精确制导武器发展及其关键技术[J].火力与指挥控制,2008,33(12):5-7;12.
猜你喜欢
上海电机学院学报(2021年5期)2021-02-11
装备制造技术(2020年11期)2021-01-26
数字通信世界(2021年2期)2021-01-13
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
汽车工程学报(2015年6期)2016-03-23
北京航空航天大学学报(2016年4期)2016-02-27
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
太空探索(2014年1期)2014-07-10
