
岭澳核电厂汽轮机监视系统换型与优化
2015-06-05 14:57胡琰军王君
综合智慧能源 2015年5期
胡琰军,王君
(苏州热工研究院有限公司系统工程中心,广东深圳 518124)
岭澳核电厂汽轮机监视系统换型与优化
胡琰军,王君
(苏州热工研究院有限公司系统工程中心,广东深圳 518124)
以岭澳核电厂一期#1,#2机组为例,分析了汽轮机监视系统所用ALSTOM TYPE7系统在运行中存在的问题,采用epro GmbH生产的MMS6000系统对汽轮机监视系统进行了换型改造和通道优化,提高了系统的稳定性和可靠性。
岭澳核电厂;1000MW机组;汽轮机监视系统;MMS6000;换型与优化
0 引言
汽轮机监视系统(TSI)在汽轮发电机组启动、功率运行和停机过程中,对机组转子和汽缸等设备的工作参数进行连续监测、指示和记录,当运行参数超出设定限值时能够及时发出报警和停机信号,并为其他系统提供输入、输出接口等,是大型旋转机械必不可少的监视和保护系统。
岭澳核电厂一期拥有2台装机容量1 000MW的压水堆核电机组,其#1,#2机组分别于2002年5月和2003年1月建成并投入商业运行。机组投运后取得了优异的运行业绩,但部分系统和设备也存在改造升级的需求,其中由ALSTOM设计和供货的TYPE7汽轮机监视系统就存在故障率高和备件停产等问题。经过充分调研,于2012年1月和2013年3月使用MMS6000系统顺利完成了岭澳核电厂一期#2和#1机组汽轮机监视系统改造。
1 岭澳核电厂一期汽轮机监视系统
1.1 改造背景
岭澳核电厂一期汽轮机监视系统(系统三字码为GME)作为机组运行状态下对汽轮机的有效监视手段,每台机组分别有近百个监测通道,部分通道的信号被送往集中数据处理系统(KIT)、电度表和故障录波仪系统(KKO)以及主控记录仪(EN)、指示表(ID)等,用于显示和记录,其他通道的信号被送往警报处理系统(KSA)、汽轮机调节系统(GRE)、汽轮机保护系统(GSE)等,用于功率调节、报警和跳机等。
岭澳核电厂一期汽轮机监视系统改造前存在故障率高、备件停产、通道波动较大等问题,部分故障至今还没有找到根本原因和解决方法,不能很好地实现对汽轮机状态的监视功能,且给机组的维修和运行带来了极大的不便。其中部分故障是由软件原因导致的,部分故障是由硬件自身的缺陷导致的,而产品停产也导致了库存备件不足等问题。经综合考虑和分析,岭澳核电厂决定对一期汽轮机监视系统(包括传感器和测量模块等)进行整体换型改造。
1.2 测量通道
此次岭澳核电厂一期汽轮机监视系统改造的范围主要包括转速、轴振、瓦振、偏心、键相、推力瓦磨损、高低压缸胀差、绝对膨胀、发电机功率、阀位和凝结水泵振动等测量通道。其中,阀位测量的原理、方式和胀差类似,凝结水泵振动测量的原理、方式和汽轮机水平瓦振测量原理完全一致,本文不再单独对阀位和凝结水泵振动测量通道进行介绍。
1.2.1 转速
汽轮机的转速值是机组启、停以及稳定运行时的重要参数,转速和振动等参数密切相关。岭澳核电厂一期转速测量通道由4个(加上备用传感器共5个)装于机头前箱正对60齿盘的传感器和测量模块等组成,其测量范围为0~4 000 r/min,而功率运行期间的正常工作转速为3000 r/min。
1.2.2 轴振(转子振动)
对于旋转设备而言,转子径向振动幅度是衡量其全面的运行状况的一个最基本指标。很多机械故障,包括转子不平衡、不对中、轴承磨损以及摩擦等都可根据振动进行探测。岭澳核电厂一期机组同一轴承位置安装有2个相同的轴振传感器,安装方向相互垂直。当传感器端部与转轴表面间隙变化时,传感器输出一个交流信号到测量模块,测量模块计算出间隙变化(即振动)的峰-峰值。岭澳核电厂一期每台机组有24个轴振测量通道,其测量范围为0~500μm,报警值为135μm。
1.2.3 瓦振(轴承座振动)
转子的振动可以传递到轴承座上,利用速度传感器测量机壳相对于自由空间的运动速度,测量模块把从传感器送来的速度信号进行检波和积分变成位移值,并计算出相应的峰-峰值。岭澳核电厂一期每台机组有24个瓦振(垂直和水平)测量通道,其测量范围为0~250μm,报警值为64μm。
1.2.4 偏心和键相
转子的偏心位置也叫轴的径向位置,是转子在轴承中的径向平均位置。转子偏心测量可作为轴承磨损及预加负荷状态(如不对中)的一种指示。岭澳核电厂一期的偏心测量模块接收2个传感器信号输入。键相传感器用于观察转子上的一个键槽,转子每旋转一周就产生一个脉冲电压信号,键相信号可用于指示偏心和振动的相位。岭澳核电厂一期每台机组有4个偏心测量通道,其测量范围为0~500 μm,报警值为135μm。
1.2.5 推力瓦磨损
转子在运行过程中由于各种因素会使其在轴向有所移动,这样转子和推力轴承之间有可能发生动静摩擦,所以需用传感器测量转子相对于推力瓦之间位置的变化,即转子在轴向相对于止推轴承上推力瓦的间隙。目前,岭澳核电厂一期在前后侧推力瓦上各安装了2个传感器(以及1个备用传感器)进行推力瓦磨损测量,任意一侧“2取2”后进行跳机保护输出。岭澳核电厂一期每台机组有6个推力瓦磨损测量通道(包括4个在线通道以及2个备用通道),其测量范围为-0.5~1.0mm,报警值为0.5 mm,跳机值为0.7mm。
1.2.6 胀差
胀差测量的是转子和汽缸之间的相对热增长情况,当热增长的差值超过允许间隙时,便可能产生摩擦。监视胀差值的目的是在转子和汽缸产生摩擦之前采取必要的措施来保证机组的安全。岭澳核电厂一期每台机组有4个胀差测量通道,包括1个高压缸胀差测量通道和3个低压缸胀差测量通道。其中,高压缸胀差测量通道的量程为-5~7mm(报警值分别为-3.5mm和3.0mm),3个低压缸胀差测量通道的测量范围为-10~40mm(#1低压缸的报警值为-0.7mm和9.8 mm,#2低压缸的报警值为-1.5mm和19.4mm,#3低压缸的报警值为-2.2 mm和28.9mm)。
1.2.7 绝对膨胀
汽轮机在启机过程中由于受热使汽缸膨胀,如果膨胀不均匀就会导致汽缸变斜或翘起,这种变形会使汽缸与基础之间产生巨大的应力,由此带来不对中现象。对机组的汽缸绝对膨胀和转子与汽缸之间的胀差进行测量,就可以掌握转子和汽缸的膨胀情况。岭澳核电厂一期绝对膨胀测量使用的是线性可变差动变压器(LVDT),其铁芯与汽缸连接,而线圈部分固定在基础上。岭澳核电厂一期每台机组有2个绝对膨胀测量通道,其测量量程为0~25mm,仅有模拟量显示输出,没有报警输出。
1.2.8 发电机功率
对发电机功率的测量和监视是岭澳核电厂一期汽轮机监视系统区别于其他多数常规火电厂的功能之一。汽轮机监视系统的测量模块接收上游其他系统提供的标准4~20mA信号,对应0~1200MW,通过阈值比较和输出扩展,为汽轮机调节系统等其他系统和仪表输出模拟量和开关量信号,用于功率调节、数据记录和显示。汽轮机监视系统在电厂功率的测量和调节等过程中起着承前启后的关键作用,通道的高精度、可靠性和稳定性是其主要特点。
2 改造后的汽轮机监视系统
2.1 MMS6000系统
改造后汽轮机监视系统的总体结构如图1所示,其中EPRO公司生产的电涡流、速度式和LVDT等传感器安装在汽机厂房的汽轮发电机固定基础和轴瓦等设备上,传感器信号通过自带的延伸电缆送至汽机平台的就地端子箱内,再通过改造前原有的电缆送往电气厂房内的信号处理柜GME001AR BAY1和BAY2,经过MMS6000系统的信号处理和逻辑组态后通过改造前原有的电缆送往其他系统进行显示、控制和保护等,同时所有测量数据以通信方式从BAY1送至BAY3内改造新增的汽轮机振动分析和故障诊断(TDM)系统。
改造前,岭澳核电厂一期的TYPE7系统安装在电气厂房的2个机柜内,共装有4个测量处理机架系统。为尽可能减少现场的电缆敷设等工作,改造后2个集成了MMS6000系统的机柜(GME001AR BAY1和BAY2)仍然安装在电气厂房内原TYPE7系统机柜的位置,主要由5个机架(GME001/002/003/004/005CQ)及安装在机架内的测量模块以及安装在机柜内的电源模块、通信模块、输出隔离卡和继电器等设备组成,其中BAY1内安装有3个机架、BAY2内安装有2个机架,每个机架最多可以安装14个测量模块,每个测量模块包括2个通道。每个机柜配有2个冗余电源模块,安装于机架附近的柜内端子排上。
MMS6000系统不同类型的通道使用不同的测量模块,岭澳核电厂一期改造后使用的模块主要有以下几类:MMS6312,转速/键相测量模块;MMS6220,偏心测量模块;MMS6110,轴振测量模块;MMS6120,瓦振/凝结水泵振动测量模块;MMS6210,推力瓦磨损/胀差/阀位测量模块;MMS6410,绝对膨胀测量模块;MMS6620,功率测量模块。
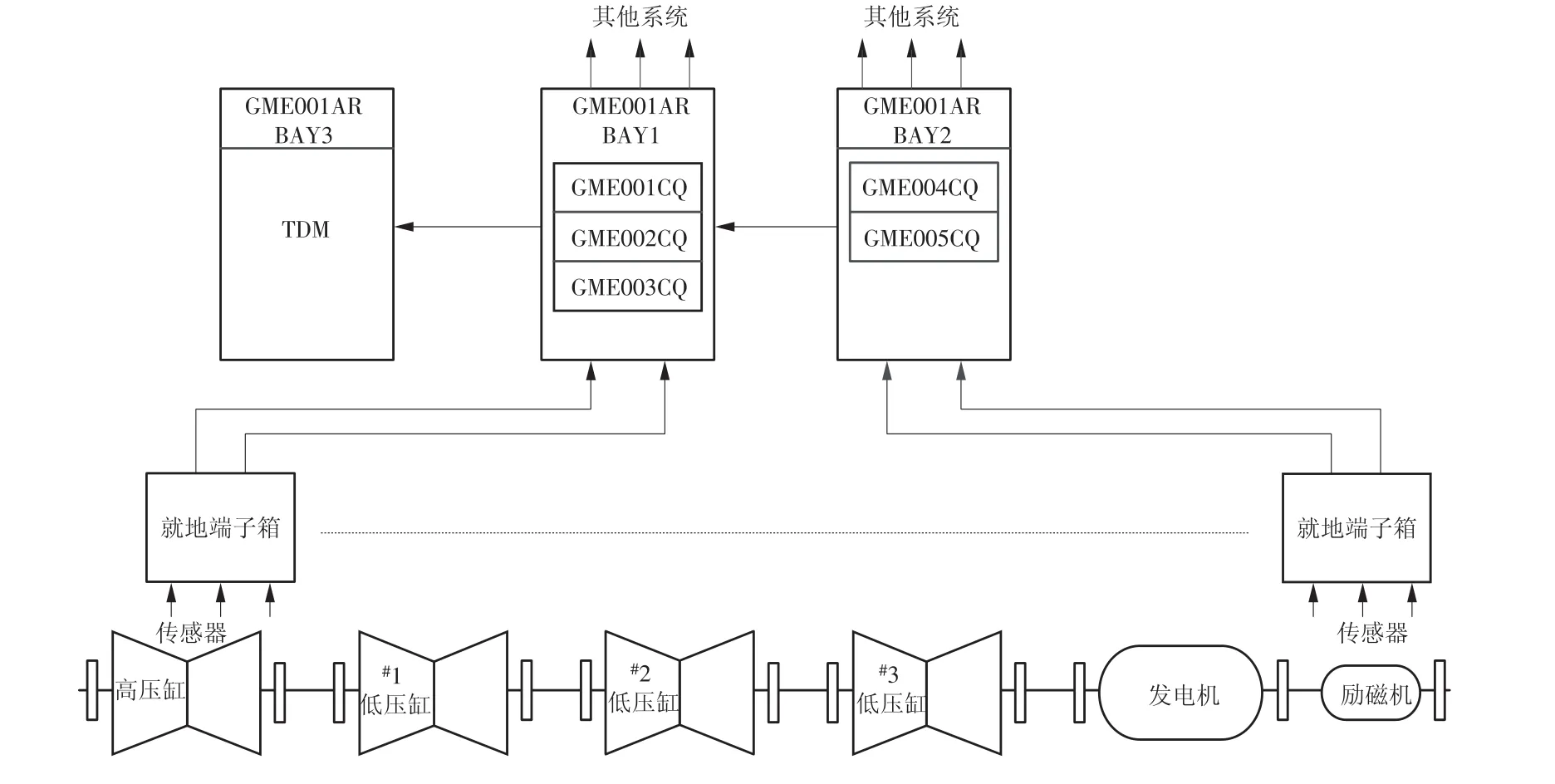
图1 MMS6000系统结构
各测量模块一般为双通道,内置微型控制器并带有标准RS485与RS232接口,其中RS232接口用于数据读取和组态设置,RS485接口用于通信。通过便携式计算机上的专用软件MMS6910可对各测量模块进行组态设置,如设置传感器类型、量程、测量方式、报警值和报警延时时间、通道地址等,并可进行各通道的线性采集。
各测量模块由同一机柜内的2个冗余电源模块供给24 V DC电源,作为内部可调传感器的供给电压或电流,并设有传感器和回路自检装置,模块的输出端连接信号输出隔离卡和继电器等辅助设备。
2.2 TDM系统
此次改造在电气厂房新增加了1个(BAY3)机柜,用于安装MMS6851的TDM系统,系统连接图如图2所示。该系统采用Windows XP操作平台,数据管理采用网络数据库结构,具有实时数据采集、分析、存储和显示、历史资料查询和分析、振动特征分析、动平衡和故障诊断等多种功能。MMS6851系统通过专用的数据采集和通信模块MMS6823与#1机柜和#2机柜(图2中省略)内的MMS6000系统各测量模块的数据总线建立通信,并获取实时测量数据,系统的通信协议为TCP/IP,最终由上位机通过显示器和打印机实现图形、报表和故障诊断结果的显示和打印输出。
新增MMS6851系统的在线监测功能主要包括以下几类:实时波形图、实时轴心轨迹、振动谐波分量、实时趋势图、实时棒图和实时波特图等。相比于改造前,新增系统使启、停机阶段能够更直观和快捷地对机组转速、振动、胀差和推力瓦磨损等参数进行实时监视,其历史数据和历史报警的记录功能也为日常通道故障排查等工作提供了方便。

图2 MMS6851系统连接图
2.3 新旧系统对比
MMS6000系统的各测量模块均支持热插拔和在线组态,相较于改造前的TYPE7系统,改造后的系统更便于现场维修,且更加分散的通道布置减少了单个模块或通道故障对系统的影响范围。另外,测量模块的软件组态和通道校验也较改造前更为方便,而新增加的TDM系统为汽轮机状态的监视和故障分析等提供了更为有利的手段。
2.3.1 通道布置和主要硬件对比
由于改造后MMS6000系统的测量模块均为两通道设计,为部分重要通道的分散布置提供了有利条件,而改造前的测量模块通道集成度过高,导致部分通道的布置不合理。以此次改造中的推力瓦磨损保护通道为例,推力瓦磨损通道的跳机逻辑如图3所示,即前侧2个通道(GME037MV和GME038MV)同时出现高高信号或后侧2个通道(GME039MV和GME040MV)同时出现高高信号并持续1 s以上,则输出到汽轮机保护系统(GSE)进行跳机。
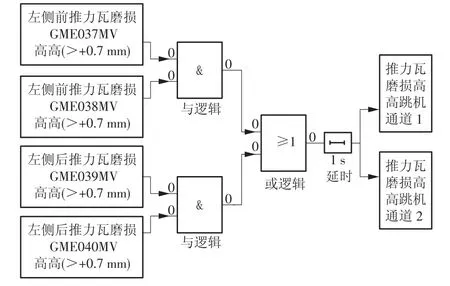
图3 推力瓦磨损通道跳机逻辑示意
改造前通道布置情况:左侧前(GME037MV)和左侧后(GME039MV)2个推力瓦磨损通道布置在同一个测量模块上,位于#2机柜SUBRACK2的#0测量模块的通道2和通道3;右侧前(GME038MV)和右侧后(GME040MV)2个推力瓦磨损通道布置在同一个测量模块上,位于#2机柜SUBRACK2的#1测量模块的通道2和通道3。按照改造前的布置情况,当上述2个测量模块中的任意一个出现故障后(测量模块故障后其所有通道的输出均为低值信号),将导致前侧和后侧各有一个推力瓦磨损通道的输出为低值,如果此时现场恰好出现真实的推力瓦磨损高,该模块上的2个通道无法正常动作,即相当于某一个测量模块故障后将导致推力瓦磨损的两列“2取2”通道均不可用。
改造后,4个推力瓦磨损通道GME037/038/039/040MV分别布置在4个不同的测量模块上。任意一个测量模块故障仅影响一个推力瓦磨损通道,即仅有一侧的“2取2”跳闸通道不可用,另一侧的“2取2”跳闸通道可正常工作,极大地降低了保护拒动的风险。另外,改造前的前侧备用通道GME083MV和后侧备用通道GME084MV仅在就地安装了传感器和前置器,并没有对前置器进行供电,且在主控室或电气厂房内均没有测量值的显示。改造后,GME083/084MV的信号通过新增的电缆送到了电气厂房ISI#2机柜的2个测量模块上,并通过通信方式将测量值送到#3机柜新增加的TDM系统进行显示,当同一侧2个保护通道的测量值偏差较大时,可通过比对同侧备用通道的读数来进行快速的故障判断和排查,如果此时存在真实的推力瓦磨损高信号而又没有自动触发跳机信号,则操纵员可根据备用通道的测量值进行紧急情况下的快速手动打闸等。
另外,由于同一个MPSS的4个MPU使用的是一个电源模块供电,而MPU不支持热插拔,如果机组运行期间需要更换某个故障测量模块,则需同时断掉整个机架的供电。以BAY2的SUBRACK2为例,如果其中任意一个MPU故障需要更换,则会导致所有4个MPU断电,则4个推力瓦磨损通道和该机架上的其他所有通道均不可用,将对机组的运行造成较大的风险。改造后,如果某个测量模块故障,则可在对该模块通道进行风险分析后直接在线更换和组态即可,无需断电,且更换过程中不会影响其他模块的正常工作。
改造后的测量模块在通道故障排查方面也较改造前更为方便和快捷。改造前每个测量模块的12个通道共用1个故障或阈值报警指示灯,出现报警后不便于快速定位到具体某一个通道。改造后的每个通道对应一个故障或阈值报警指示灯,在出现故障或阈值报警后可进行通道的快速定位。
2.3.2 组态软件对比
改造前,TYPE7系统MPU的组态软件为MSDOS环境,人机界面不够友好,操作和使用不方便。改造后,MMS6000系统的测量模块组态软件可安装于WIN 98/WIN NT/WIN XP/WIN 7等目前市场上常用的操作系统中,安装完成后将会在操作系统界面上生成一个MMS6910 Configuration的快捷方式,双击后打开输入登录的用户名和密码即可进入组态界面,如图4所示。MMS6910组态软件可选择英文/中文等多种语言环境,使用该组态软件可新建组态文件,也可以对已经保存的或现场模块内的组态文件进行修改。
每个组态文件主要包括以下部分:选择测量模块和传感器的类型,电厂、设备和通道的名称,测量量程和单位,输入、输出类型选择和阈值设定,通信相关的数据采集的截止频率、采样时间间隔和波特率等。
改造后测量模块组态软件的人机界面更为友好,参数设置更为直观和方便,极大地减少了设备维护和通道组态工作量。
3 实施过程中的问题及解决方案
3.1 转速通道导致盘车跳闸
大修改造实施期间,参照停机时测量的转速传感器的定位电压值(-12.9~-23.0 V),转速通道的脉冲触发电压设定为-16 V(上升沿)/-15 V(下降沿)。盘车开始后转子出现轻微的顶偏,导致

图4 改造后通道组态界面
转速传感器测量电压和大修停机时的定位电压存在偏差,其中GME004MC的电压值为-23.0~-15.1 V,无法触发下降沿,使该通道无法识别转速脉冲,转速显示和输出持续为0,导致第1次盘车时马达跳闸。
经过对机组盘车和功率运行期间转速通道传感器电压的录波和分析,项目组讨论决定将测量模块内的脉冲触发电压由-16V(上升沿)/-15V(下降沿)修改为-20 V(上升沿)/-19 V(下降沿),GME004MC工作正常,盘车正常投运,机组转速测量准确。
3.2 功率通道导致逆功率保护动作
3个有功功率测量通道GME001/002/003MW的4~20mA量程对应实际功率0~1 200MW,改造后通道超限故障电压分别设置为3.8mA和20.2 mA。大修后的并网瞬间出现了-30MW(对应3.6 mA)的逆功率,低于GME001/002/003MW测量模块的故障电压限值3.8mA,由于在软件组态中勾选了Current suppression功能,使得测量模块在检测到测量值超低限后,输出瞬间跳变为0mA,汽轮机调节系统(GRE)检测到汽轮机监视系统(GME)的电流小于3.2mA以后停止自动升功率,转为手动控制并触发报警,后由操纵员手动升功率至最小负荷50MW。
经过对旧的TYPE7系统的试验,发现其在上游电气信号为0~20mA时,测量模块的输出完全跟随上游电气信号,当上游电气信号大于20mA时,输出维持在20mA。综合旧系统的试验结果,项目组对新系统的3个有功功率通道重新进行了组态,修改后当上游电流输入信号在0~20mA时其输出完全跟随上游信号,当上游电流输入信号大于20mA时其输出维持在20mA,避免了GME001/002/003MW的测量模块在输入信号超限之后输出跳变为0mA事件的发生。
3.3 键相传感器安装间隙偏小
按照设备供应商的要求,改造后键相传感器GME065MV的最初安装间隙定为1.0mm(改造前定位间隙为1.5mm),转子冲转后,由于转子顶偏和膨胀等因素,传感器和转子的间隙缩小,两者存在摩擦的潜在风险,有可能损坏传感器。
键相通道测量模块面板上的通道故障指示灯闪烁后,连接记录仪对传感器信号进行录波,发现波形中比理论多出了一个小毛刺(其电压为-2V左右),导致波形电压超出了通道电压限值-26.2~-3.5V,触发通道故障报警,提示传感器安装间隙过小。项目组随后利用冲转期间超速试验后的惰转窗口对现场传感器的安装间隙进行了调整,由1.0mm调整至1.5 mm,相当于将传感器和转子之间的间隙增加了0.5 mm,确保了传感器的安全测量。
4 结束语
此次改造利用岭澳核电厂一期2台机组换料大修和启停机的窗口对新系统进行了充分的功能再鉴定,保证了新系统在各种运行工况下的正常工作,新系统投运至今运行稳定,极大地减少了现场维护的成本,并提高了机组的安全运行水平。由于大修窗口和检修人力等因素的限制,改造部门在现场实施前多次与大修计划、主机和仪表检修等部门进行充分的沟通,做好了详细的实施计划,并建立了一个畅通的信息通报机制,为项目的顺利完成提供了有效保证。
(本文责编:白银雷)
TK 32
:A
:1674-1951(2015)05-0004-05
胡琰军(1985—),男,广东深圳人,工程师,从事核电厂仪控改造方面的工作(E-mail:huyanjun@cgnpc.com.cn)。
2014-11-18;
2015-03-10
猜你喜欢
核安全(2022年2期)2022-05-05
中国特种设备安全(2022年1期)2022-04-26
河北农机(2020年10期)2020-12-14
中国核电(2020年2期)2020-06-24
趣味(数学)(2020年12期)2020-06-09
铁道通信信号(2019年4期)2019-10-10
凿岩机械气动工具(2017年2期)2017-07-19
中国核电(2017年1期)2017-05-17
凿岩机械气动工具(2015年3期)2015-11-11
汽车零部件(2015年8期)2015-06-23
