
空地制导武器传递对准及组合导航半实物实时仿真系统设计
2015-06-05 14:51白宏阳段江锋苏文杰
中国惯性技术学报 2015年2期
白宏阳,段江锋,熊 凯,苏文杰
( 1. 南京理工大学 能源与动力工程学院,南京 210094;2. 第二炮兵驻七一〇七厂军事代表室,陕西 宝鸡721006;3. 北京控制工程研究所,北京 100190 )
空地制导武器传递对准及组合导航半实物实时仿真系统设计
白宏阳1,段江锋2,熊 凯3,苏文杰1
( 1. 南京理工大学 能源与动力工程学院,南京 210094;2. 第二炮兵驻七一〇七厂军事代表室,陕西 宝鸡721006;3. 北京控制工程研究所,北京 100190 )
针对空地武器攻击时敏目标半实物仿真系统的应用需求,以往所采用的纯数字仿真系统及方法已无法满足和实现所需要的功能,现有的半实物仿真技术又存在功能单一、接口有限、二次开发难的缺陷,提出了一种空地武器攻击时敏目标半实物仿真系统方案, 重点设计了传递对准算法和GPS/INS组合导航算法。以空地制导炸弹为例,系统仿真功能涵盖了从载机挂弹飞行、系统自检、传递对准、热电池激活、数据链开启、炸弹投放、弹体姿态稳定、弹翼张开、滑翔中制导、中末交班、导引头开启、末制导直到命中时敏目标结束的全工作流程, 针对该复杂系统的时间统一问题,提出了一种全系统投弹前后的传递对准时间同步方法。最后的模拟投弹试验结果表明:所设计的半实物仿真系统结构合理、实时性好、功能齐全,可为后期空地制导武器的研制提供一种非常有效的半实物仿真试验方法。
制导炸弹;半实物仿真;传递对准;组合导航
随着现代战争的发展,战场中的目标种类及数量迅速增加,尤其是移动目标在战争中发挥的作用日益增强。诸如坦克、导弹发射车、装甲车等移动速度较快的地面目标,大多表现为打打走走、开开停停的时间敏感特性[1-3];另一方面,随着联合作战任务的提出,未来的空地制导武器还需要在空中投放后能够继续接收载机或其它中继机通过无线数据链路发送来的信息以进行二次任务规划和目标信息装订,使得空地制导武器可重新规划弹道并进行目标选择性打击,体现制导武器的作战时敏特性。机载航空时敏制导炸弹即是在上述两个任务背景下提出和设计的,在原炸弹的基础上,通过加装红外图像导引头、GPS/INS组合导航系统、飞控计算机、热电池、舵机和多节点双向数据通讯链路等系统而构成。因此,研究机载时敏目标打击技术、研制机载时敏目标打击武器具有非常重要的战术意义和军事价值。
与纯数字仿真技术相比,半实物仿真试验是将系统中的部分实物引入仿真回路,能够反映系统的动、静态特性,且更加接近实际,现已成为飞机和导弹中导航、制导与控制系统研制与鉴定的重要试验环节。本文从实际工程中的应用需求出发,按照制导炸弹的发射流程,搭建了航空时敏制导炸弹分布式半实物仿真系统。在此基础上,针对不同的时敏目标类型进行了多次模拟投弹与打靶试验。该半实物仿真系统的设计旨在为机动目标打击用航空精确制导武器导航与飞控系统的设计和试验提供一种有效的试验手段,更真实地仿真武器实际打击时敏目标过程中的动态特性,缩短武器的研制周期。
1 半实物仿真系统的组成与功能
该半实物仿真系统主要由仿真总控机、飞机仿真计算机、机载火控仿真计算机、机载吊舱、弹载数据链端机、导引头模拟器、目标仿真计算机、弹道仿真计算机、弹载导航系统、三轴转台、电动舵机、舵机负载模拟器、弹载飞控计算机、三维视景演示与数据监控系统以及1553B通讯卡、串口通讯卡和SBS光纤通讯卡等构成,如图1所示。其中弹道仿真计算机包括环境仿真模块、弹体动力学及运动学模块和通信模块;弹载导航系统包括GPS模块、惯性测量单元(IMU)模块和弹载导航计算机(组合导航计算机);弹载飞控计算机包括通信模块、逻辑控制模块、制导律模块、控制律模块和坐标转换模块。
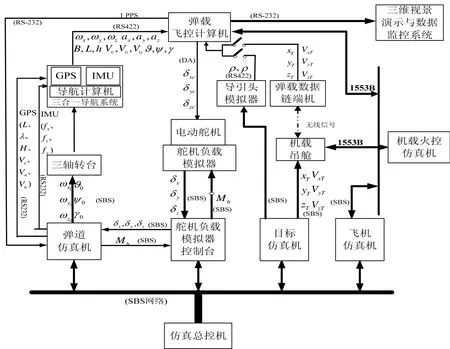
图1 半实物仿真系统结构图Fig.1 Architecture of semi-physical simulation system
1.1 目标仿真计算机
目标仿真计算机主要用来模拟时敏目标的静、动态特性,主要包括静止、匀速、加速等过程,并将目标当前的位置、速度、类型、状态等信息写入SBS实时网络,分别传递给机载吊舱和导引头模拟器。机载吊舱将目标信息无线发送给弹载数据链端机,然后通过RS-422串口发送至弹载飞控计算机。
1.2 导引头模拟器
导引头模拟器将接收到的目标信息通过共享弹道仿真机的武器当前所在位置信息,转换为弹目视线角和视线角速率,并在距目标3 km后开始传递给弹载飞控计算机,以模拟真实情况下导引头的工作过程。
1.3 飞机仿真计算机
飞机仿真计算机主要用来模拟实际系统中飞机的飞行过程,产生相应的飞行轨迹和主惯导数据。飞机仿真计算机有两种模式:自主飞行系统模式和人工操作模式。当选用人工操作模式时,可通过飞机仿真计算机上配置的飞行摇杆控制飞机的飞行,通过人机界面可以实时显示当前飞机的飞行姿态和飞行轨迹参数等信息。在传递对准过程中,飞行轨迹信息结合误差模型生成模块,加入对应误差特性,可模拟生成传递对准所需的主惯导数据;同时可以通过飞行摇杆做相应的机动(本文主要采用摇翼机动),辅助完成传递对准解算,更加真实地再现空中传递对准过程。
1.4 弹道仿真计算机
弹道仿真计算机是该半实物仿真系统的关键,主要用来模拟传感器IMU及GPS的原始测量信息,解算弹道诸元,计算负载模拟器的力矩加载信息,并接收舵机负载模拟器采样的舵偏指令,闭环控制炸弹的当前飞行轨迹。弹道仿真计算机采用多线程设计。在传递对准过程中,弹道仿真机实时获取主惯导信息,结合误差发生模块加入误差特性,同时还可以添加安装误差和杆臂效应等误差,以便真实模拟生成传递对准过程中所需的弹载子惯导测量信息。当按下发射按钮后,系统进入组合导航流程,弹道仿真机切换到弹道仿真线程,模拟生成弹载组合导航所需的IMU及GPS测量信息。
1.5 机载火控仿真计算机
机载火控仿真计算机主要用于模拟载机投放武器的全指令流程以及向武器装订目标初始参数。机载火控仿真计算机主要完成以下功能:全系统自检、点火准备、发射信号的接收、显示与执行等。在传递对准过程中,机载火控仿真机通过SBS实时网络获取飞机仿真计算机产生的主惯导信息,经过处理,通过1553B发送到弹载飞控计算机;在组合导航过程中,火控仿真计算机通过SBS实时网络获取目标信息,通过1553B总线发送至弹载飞控计算机。
1.6 弹载导航系统
弹载导航系统安装于三轴转台上,用于将接收到的飞机主惯导信息、弹道仿真计算机模拟产生的卫星信息和惯性信息进行信息融合,以进行传递对准和组合导航。弹载导航系统中所采用的弹载导航计算机为DSP+FPGA并行架构[4-5]。其中DSP采用浮点型数字信号处理芯片TMS320C6747,其主要功能是进行捷联惯导解算、传递对准解算和组合导航解算等; FPGA主要用于数据的实时采集和通信,大大减少了数据采集和通信对导航解算的影响。
1.7 弹载飞控计算机
弹载飞控计算机采用浮点型数字处理芯片TMS320C6748,具有运算速度快、精度高等特点,可快速执行和完成相关计算任务。在传递对准过程中,弹载飞控计算机通过航空1553B总线获取主惯导信息,经过处理,通过RS-422串口将主惯导信息发送到弹载导航计算机。传递对准过程结束后,弹载飞控计算机控制系统流程切入组合导航流程。在组合导航流程中,弹载飞控计算机通过RS-422串口获取弹载导航计算机的导航解算结果,完成制导、控制律、坐标转换和逻辑控制等运算,并生成相应的指令舵偏,通过D/A数模转换通道驱动电动舵机进行偏转。
1.8 舵机负载模拟器
舵机负载模拟器根据弹道仿真计算机模拟出的铰链力矩对舵机加载相应的力矩,然后由舵机负载模拟器读取测量的实际舵偏角,并通过舵机负载模拟器控制台经SBS光纤网络反馈给弹道仿真计算机。
1.9 监控计算机
监控计算机的主要任务是对半实物仿真系统的工作过程进行实时监控,在线显示武器的整个飞行和攻击过程以及各参数状态,进行性能分析与评估。其主要功能包括全程数据及状态实时显示、曲线实时显示、OpenGL投弹全程动画显示以及仿真结果存储等。
1.10 硬件接口部分
由于该半实物仿真系统中存在设备较多,各子系统之间的接口复杂,数据传输量较大等问题,导致系统的实时性难以保证。针对上述问题,系统设计采用一台仿真总控机控制各路SBS光纤的实时通讯,模拟飞机飞行过程的飞机仿真计算机通过SBS光纤网络与模拟载机外挂物管理器的机载火控仿真计算机相连,机载火控仿真计算机通过航空1553B总线与弹载飞控计算机相连,模拟目标运动过程的目标仿真计算机分别通过两路SBS光纤网络与机载吊舱和导引头模拟器相连,机载吊舱与弹载端机通过收发无线信号互相进行通信,弹载端机和导引头模拟器分别通过RS-422串口与弹载飞控计算机相连,电动舵机安装在舵机负载模拟器上,舵机负载模拟器与舵机负载模拟器控制台通过SBS光纤网络连接,弹载导航系统安装在三轴转台上,三轴转台、舵机负载模拟器与舵机负载模拟器控制台通过SBS光纤网络与弹道仿真计算机互连,弹道仿真计算机和弹载导航系统分别通过RS-232和RS-422串口与弹载飞控计算机相连,弹载飞控计算机通过D/A数模转换通道与电动舵机相连,并通过RS-232串口与三维视景演示与监控系统相连。
2 传递对准及组合导航算法设计
作为制导炸弹的“眼睛”,导航系统的性能直接影响制导炸弹的脱靶量,GPS/SINS组合导航具有精度高、抗干扰性强等特点,目前已得到广泛的应用。由于SINS采用推算式导航方式,故在其开始工作前需要对其进行初始对准。传递对准作为初始对准技术之一,具有可靠性强、对准精度高等特点,广泛应用于航空、航天等领域。传递对准的精度将直接影响导航系统的精度,因此,设计一种针对机载航空时敏制导炸弹的合理和高精度的传递对准算法尤为关键。
2.1 传递对准算法设计
本文中所设计的传递对准的核心算法为基于速度+姿态角匹配的传递对准算法[6-9],其原理框图如图2所示。
系统的状态方程为:

式中:
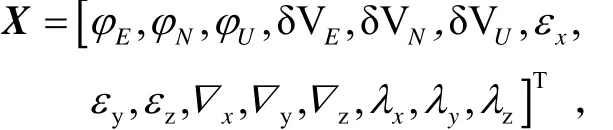
其中,Eφ、Nφ、Uφ为俯仰、滚转、航向姿态失准角,δVE、δVN、δVU为东北天速度误差,xε、yε、zε为机体系下陀螺的随机常值漂移,x▽、y▽、z▽为机体系下加速度计的零偏,xλ、yλ、zλ为三个轴方向的安装误差角;F为状态转移矩阵。

图2 速度+姿态角匹配的传递对准算法原理图Fig.2 Schematic of velocity+attitude matched transfer alignment algorithm
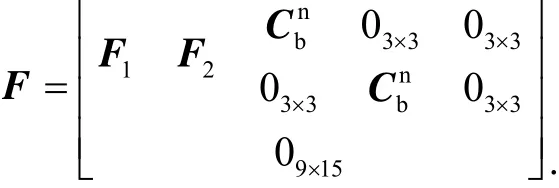
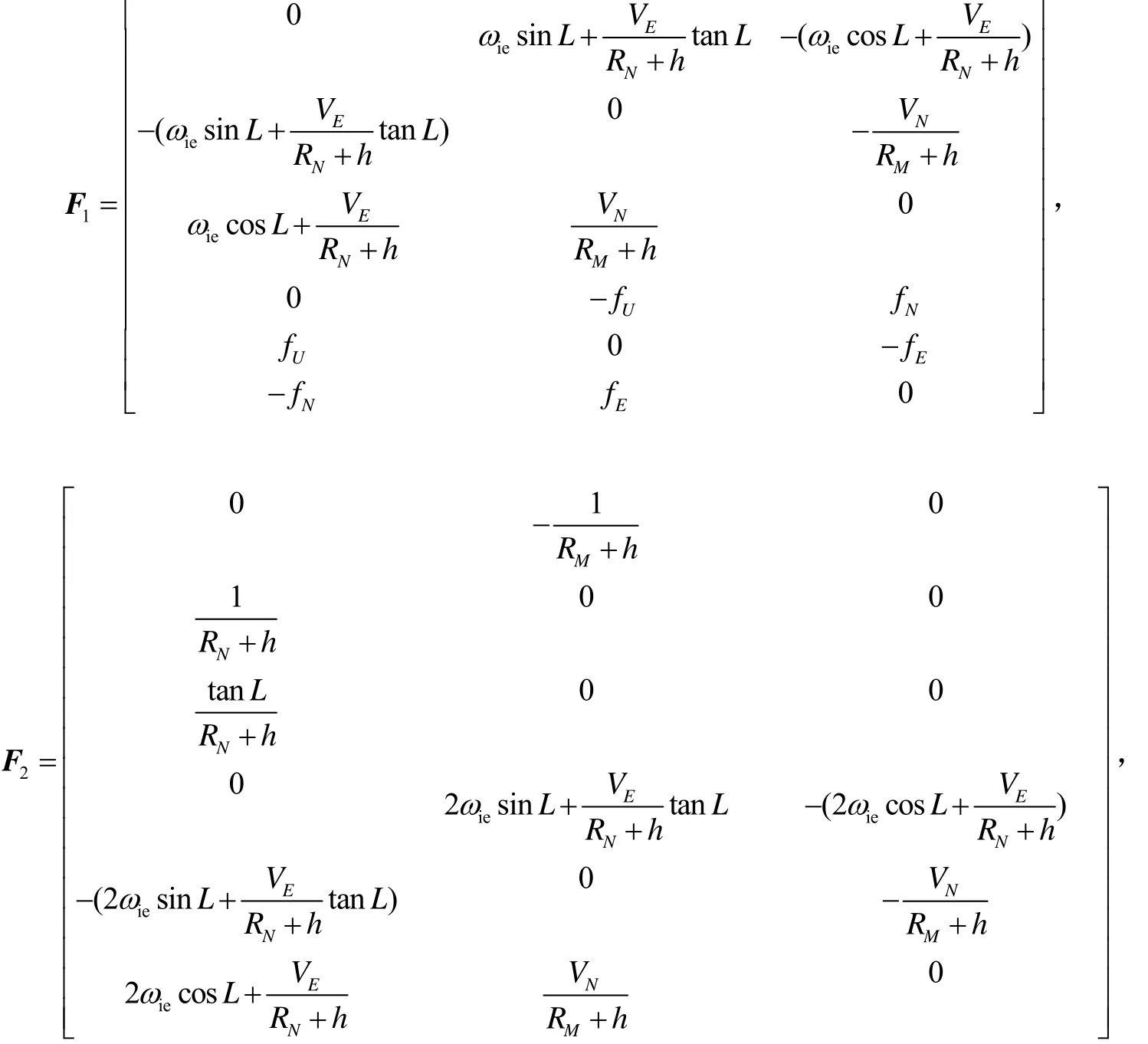
其中,矩阵块F1与F2如下所示:
系统量测方程为:

式中:Z为观测向量,

V是量测噪声,设定为零均值高斯白噪声,其协方差为E[VVT]=R。δv由主子惯导在导航坐标系下的速度相减得到;δφ为子惯导与主惯导各自所解算得到的姿态信息做差得到。
H为量测矩阵:

式中:
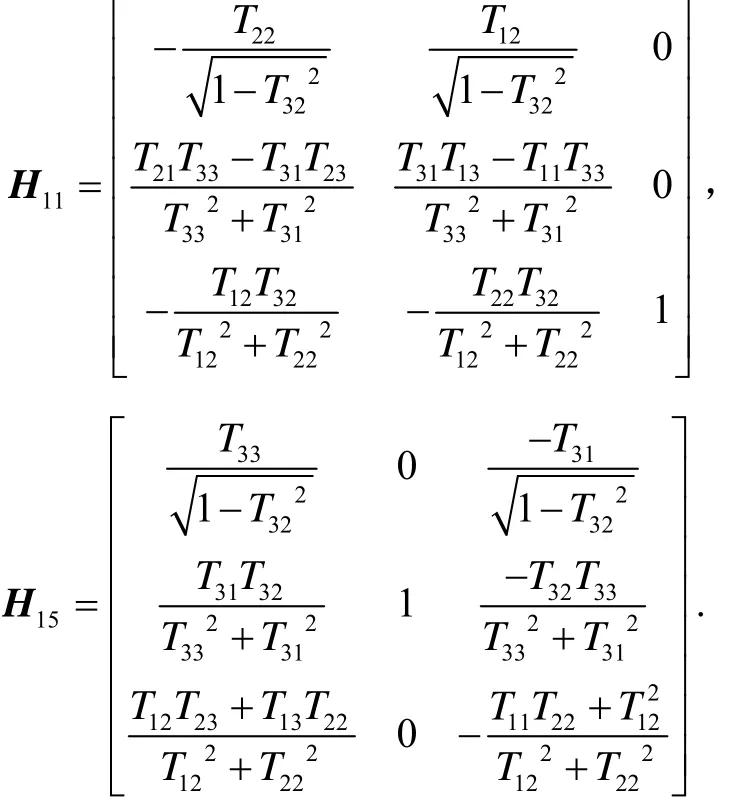
其中,Tij为主惯导系统当前姿态矩阵的元素。
2.2 组合导航算法的设计
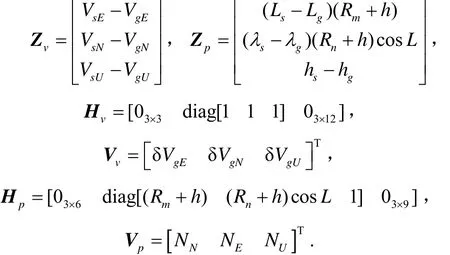
系统的状态方程为:

式中:Φk/k-1为状态转移矩阵,Γk-1为噪声驱动矩阵,协方差为E[VVT]=R,Wk-1为零均值高斯白噪声,Xk为系统状态变量。

其中,φE、φN、φU为俯仰、滚转、航向姿态失准角,δVE、δVN、δVU为东北天方向速度误差,δL、δλ、δh分别为纬度、经度和高度误差,εrx、εry、εrz为机体系下陀螺相关漂移(用一阶马尔可夫过程描述),▽x、▽y、▽z为载体系下加速度计零偏,εx、εy、εz为载体系下陀螺随机常值漂移。系统的量测方程为:
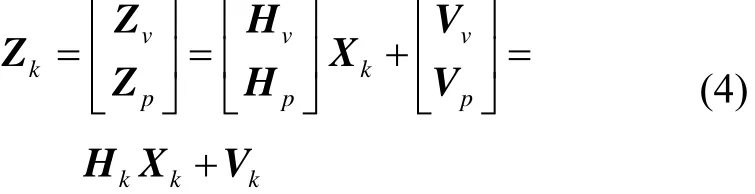
式中:Zk为量测值,Hk为量测矩阵,Vk为量测白噪声。
其中:Ls、λs、hs为SINS解算得到的载体纬度、经度和高度信息,Lg、λg、hg为GPS测量得到的载体纬度、经度和高度信息;VsE、VsN、VsU为SINS解算得到的载体在东、北、天方向的速度,VgE、VgN、VgU为GPS接收机测量得到的载体在东、北、天方向的速度;δVgE、δVgN、δVgU为GPS输出在东、北、天方向上的速度误差,通常可近似为白噪声处理;NE、NN、NU为GPS在东北天方向的位置误差。
在实际系统中,由于系统中器件误差、载体机动时的动态误差等诸多不确定因素的存在,很难准确地建立和获取系统的数学模型和噪声统计,同时在大振动、高冲击等情况下,系统中噪声突变等情况会影响常规卡尔曼滤波器(CKF)的稳定性和估计精度,甚至会导致滤波器发散[10-12]。
所以,鉴于上述问题,在常规卡尔曼滤波的基础上,引入渐消因子,构建渐消自适应卡尔曼滤波(AKF),算法如下:
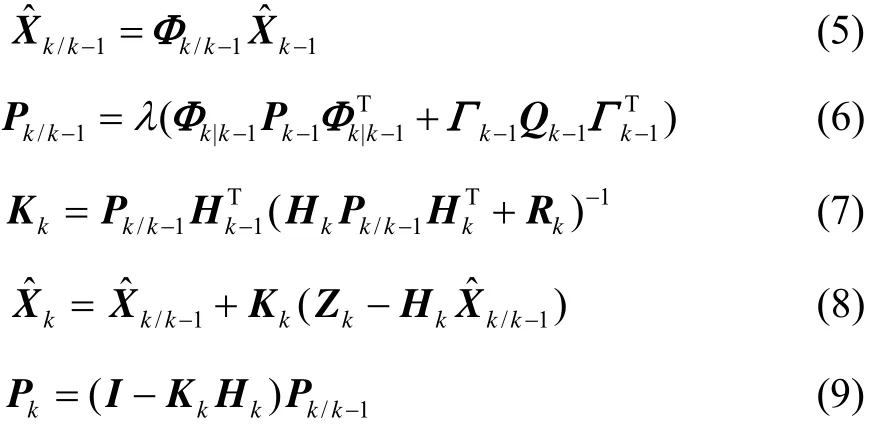
其中,λ为渐消因子,计算方法如下:
3 半实物仿真系统仿真流程
图3以航空时敏制导炸弹为例给出了空地制导武器半实物仿真系统的仿真流程图,系统总的运行流程如下:
步骤1:启动仿真总控机,打开并联通各分系统的SBS网络通讯。
步骤2:自检、握手流程。机载火控仿真计算机模拟投弹指令流程,并通过1553B总线传递至弹载飞控计算机。弹载飞控计算机驱动弹载导航系统、舵机和弹载数据链、导引头进行自检,并反馈给机载火控仿真计算机自检状态。若自检成功,在火控仿真计算机仿真界面上显示自检完成状态。自检完成后,进入握手流程:弹载飞控计算机向弹道仿真计算机发送握手信号,弹道仿真计算机收到握手信号后在界面上显示弹载飞控计算机握手成功;弹载飞控计算机向弹载导航计算机发送握手信号,弹载导航计算机收到握手信号后向弹道仿真计算机发送握手信号,弹道仿真计算机接收弹载导航计算机的握手信号后,在其界面上显示握手成功,同时返回返握手状态。
步骤3:握手完成后,系统首先进入传递对准流程。通过飞机仿真计算机人机交互界面点击准备按钮,模拟发送准备信号,同时开始模拟生成主惯导信息,并写入SBS实时网络,供火控仿真计算机获取。火控仿真计算机收到准备信号后,通过SBS实时网络获取主惯导数据,主惯导信息经火控仿真计算机和弹载飞控计算机最终传送至弹载导航计算机。弹道仿真计算机收到准备信号后,开始模拟生成传递对准所需的子惯导信息,即通过SBS实时网络获取主惯导数据,经过处理,如添加器件误差、安装误差、臂参数等,模拟生成子惯导数据,然后通过RS-232串口发送至弹载导航计算机。弹载导航计算机收到主、子惯导数据后,对数据进行预处理,根据传递对准流程开始进行传递对准解算。此时通过飞机仿真计算机配置的飞行摇杆,选择人工操作模式,做相应的机动,辅助完成传递对准运算。对准完成后,弹载导航计算机返回对准完成信号。对准完成信号经弹载飞控计算机最终发送至火控仿真计算机,并在其界面上显示对准成功。
步骤4:机载火控仿真计算机主界面上显示“对准好”状态后,可择时按动机载火控系统仿真机上模拟驾驶杆的“投弹”按钮。此时,弹道仿真机通过SBS网络接收火控系统传递的投弹初始参数,然后按所规划的方案弹道,仿真武器飞行的子惯导量测角速率和比力信息以及GPS信息。然后将角速率和投弹初始姿态角发送至三轴转台,驱动转台旋转,模拟武器的实际姿态角变化,将GPS定位信息和子惯导的比力信息发送至弹载导航系统。然后进行组合导航,确定武器的位姿信息,并将组合导航结果输出给弹载飞控计算机。
步骤5:目标仿真计算机模拟目标的运动信息并通过SBS光纤网络分别传递给机载吊舱和导引头模拟器。机载吊舱将目标信息无线发送给弹载数据链端机,然后通过RS-422串口在武器投放全程中将目标类型及坐标信息发送至飞控计算机。导引头模拟器将接收到的目标信息通过共享弹道仿真机的武器当前所在位置信息,转换为弹目视线角和视线角速率,并在距目标3 km后才开始将弹目视线角和视线角速率传递给飞控计算机,以模拟真实情况下导引头的工作过程。
步骤6:弹载飞控计算机接收到目标信息和武器的当前导航信息后,运行逻辑控制程序,每20 ms执行一次制导律、控制律和坐标转换程序,并生成相应的俯仰、偏航和滚转通道的指令舵偏;然后将三通道的指令舵偏分解为“X字型”舵机的四个舵面对应指令,通过D/A数模转换通道驱动电动舵机进行舵面偏转;舵偏偏转时,舵机负载模拟器根据弹道仿真机模拟出的铰链力矩,对舵机加载相应的力矩,然后由舵机负载模拟器读取测量的实际舵偏角,并通过舵机负载模拟器控制台经SBS光纤网络反馈给弹道仿真机。整个半实物仿真过程中,弹载飞控计算机与三维视景演示与数据监控系统相连,以动画和曲线图表的方式实时显示武器的整个飞行和攻击过程以及各参数状态。
至此,实现了双模制导航空时敏制导炸弹的半实物仿真系统的一个仿真节拍内的闭环仿真过程。
图3 系统运行流程图Fig.3 Flow chart of system operation
4 时间同步方法
在本文所设计的半实物仿真系统传递对准过程中,主惯导数据经火控仿真计算机和弹载飞控计算机,最终传送至弹载导航计算机,传输过程中会存在较大的传输延迟。而子惯导数据则由弹道仿真计算机直接传送至弹载导航计算机,时间延迟相对较小,可忽略不计。故需对主、子惯导数据进行时间同步处理。
在传递对准中,常用的同步方法包括外推法、存储器移位法、状态递推法等。上述方法均需要主、子惯导数据时标已知,而获取主、子惯导数据时标的方法有多种。如在传递对准过程中,载机可采用GPS接收机输出的GPS精确时间信息作为主惯导数据时间,同时结合定时器和秒脉冲PPS实现时间累加和校准。在本文所设计的半实物仿真系统中,主惯导数据由飞机仿真计算机在飞行轨迹数据的基础上添加对应实际中量级误差模拟产生,主惯导数据时标由飞机仿真计算机配置的定时脉冲信号得出。子惯导数据在主惯导数据的基础上,通过添加相关误差得出;子惯导数据时标根据主惯导数据时标,结合其仿真节拍推算得出。
本文传递对准时间同步方法采用状态递推法。在程序中设有缓冲区用来存储子惯导数据,缓冲区大小根据时间延迟大小而定。当收到主惯导数据后,设其时标为t1,从缓冲区中选取同一时刻的主、子惯导数据进行传递对准运算获得误差状态变量的最优估计,并根据当前时刻的状态转移矩阵将其递推到当前时刻,以对惯导系统进行反馈校正。其原理框图如图4所示,其中设当前时刻为t2,时间延迟为Δt。
图4 传递对准时间同步原理图Fig.4 Schematic of time synchronization for transfer alignment
5 系统试验及结果分析
为了验证该半实物仿真系统的性能,按照上述运行流程进行试验验证,试验主要包括传递对准精度、组合导航精度以及制导炸弹打击精度验证。试验开始前,需要对目标信息、飞机的初始位置、速度、姿态等信息进行设置,同时通过弹道仿真计算机在X、Y、Z轴方向添加适当的安装误差角模拟生成传递对准用子惯导信息。
通过飞机仿真计算机的配置文件设定初始位置为北纬38.758°,东经105.61°,高度为12 000 m,初始航向角为0°,在X、Y、Z轴方向各添加-1°的安装误差角。为了更真实地模拟实际系统中的主、子惯导特性,在初始信息的基础上叠加相应误差项,具体如下:
器件误差水平 GPS:水平定位精度为5 m (1σ),垂直定位精度为10 m (1σ),水平测速精度为0.1 m/s (1σ),垂直测速精度为0.2 m/s (1σ);机载主惯导系统:陀螺常值漂移为0.1 (°)/h (1σ),加速度计常值偏置为0.1 mg (1σ);弹载子惯导系统:陀螺常值漂移为3 (°)/h (1σ),加速度计常值偏置为1 mg (1σ)。
为了更真实地模拟实际系统中投弹过程,在投弹初始时刻第0~5 s、130~150 s、280~290 s为丢星时刻。
设置完成后按照系统运行流程开始仿真,试验结果如图5~9所示。
图5 安装误差角估计曲线Fig.5 Estimation curves of misalignment angles
图6 传递对准主子惯导姿态角曲线Fig.6 Attitude curves of main- and sub-IMU in transfer alignment
图7 组合导航位置误差曲线Fig.7 Position error curves of integrated navigation system
图8 组合导航速度误差曲线Fig.8 Velocity error curves of integrated navigation system
图9 制导炸弹与目标轨迹曲线Fig.9 Trajectory of the guided bomb and target
需要说明的是,仿真系统中实际航向角定义范围为0°~360°,由于本仿真算例炸弹朝正北方向飞行,本文为了便于对曲线进行分析,在图6中航向角曲线显示范围设为-180°~180°。分析上述试验结果可得出以下结论:
① 由图5、图6可以看出,通过做相应的机动,X、Y、Z轴安装误差角都能收敛到-1°以内,收敛时间小于10 s,可满足系统要求。
② 从图7、图8可以看出,组合导航系统的位置误差小于2 m,速度误差小于0.1 m/s(1σ);在丢星情况下,组合导航系统依然保持了较高的导航精度,满足制导炸弹对导航系统的要求。
③ 从图9可以看出,制导炸弹能够精确命中时敏目标。
6 结 论
本文提出并设计实现了一种空地武器攻击时敏目标半实物仿真系统及时间同步方法,并对系统的总体结构、传递对准和组合导航算法设计、运行流程进行了详细的介绍。与现有技术相比,文中所设计方法的显著优点是:①系统功能齐全,涵盖了从载机挂弹飞行到武器投放后对时敏目标的整个打击过程;②采用了航空总线1553B和RS422/RS232标准串口,与实际中各分系统之间的连接方式一致,便于模拟真实状态;③武器与载机之间以及武器内各分系统之间采用了与实际航空标准中一致的数据协议,具有通用性;④具有“数据链+红外图像导引头”双模制导仿真功能,可为新型联合攻击武器的研制提供参考;⑤实时性好,提高了开发效率,减少了测试风险和试验费用,为后期工程样弹的研制提供有效的科学依据,缩短了研制周期。最后的试验结果也表明该半实物仿真系统结构设计合理,稳定可靠,能够满足实际投弹的仿真要求。
(References):
[1] Ohlmeyer E J, Menon P K. Tracking of spiraling reentry vehicles with varying frequency using a new target dynamic model[J]. Journal of Aerospace Engineering, 2014, 228(8): 1235-1245.
[2] Stefanski K, Koruba Z. Analysis of the guiding of bombs on ground targets using a gyroscope system[J]. Journal of Theoretical and Applied Mechanics, 2012, 50(4): 967-973.
[3] Stefanski K, Grzyb M, Nocon L, et al. The analysis of homing of aerial guided bomb on the ground target by means of special method of control[C]//Proceeding of the 2014 15thInternational Carpathian Control Conference. Velke Karlovice, Czech Republic, 2014: 551-556.
[4] Aganwal V, Arya H, Bhaktavatsala S, et al. Design and development of a real-time DSP and FPGA based integrated GPS-INS system for compact and low power applications[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(2): 443-454.
[5] Park D B, Shin D H, Oh S H, et al. Development of a GPS/ INS system for precision GPS guided bombs[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(3): 31-39.
[6] Chen Y, Zhao Y. New rapid transfer alignment method for SINS of airborne weapon systems[J]. Journal of Systems Engineering and Electronics, 2014, 25(2): 281-287.
[7] Mohammad Z H, Stefan S, Sarang T, et al. Overcoming the challenges of Beidou receiver implementation[J]. Sensors, 2014, 14(11): 22082-22098.
[8] Fourie D, Uren K, Van S G, et al. Heading alignment with summarized inertial pose constraints[C]//IEEE International Conference on Robotics and Automation. Hongkong, 2014: 2757-2764.
[9] 陈帅, 王于坤, 李玺安, 等. 分布式光电平台用MIMU传递对准技术[J]. 中国惯性技术学报,2013, 21(6): 706-709. Chen Shuai, Wang Yu-kun, Li Xi-an, et al. Scheme of transfer alignment of MIMU for distributed optoelectronic platform[J]. Journal of Chinese Inertial Technology, 2013, 21(6): 706-709.
[10] Bhatt D, Agganwal P, Devabhaktuni V, et al. A novel hybrid fusion algorithm to bridge the period of GPS outages using low-cost INS[J]. Expert Systems with Applications, 2014, 41(5): 2166-2173.
[11] Zhong Mai-ying, Guo Jia, Cao Quan. On designing PMI Kalman filter for INS/GPS integrated systems with unknown sensor errors[J]. IEEE Sensors Journal, 2015, 15(1): 535-543.
[12] Fairfax L D, Fresconi F E. Position estimation for projectiles using low-cost sensors and flight dynamics[J]. Journal of Aerospace Engineering, 2014, 27(3): 611-620.
Design of real-time semi-physical simulation system for transfer alignment and integrated navigation of airborne guided weapon
BAI Hong-yang1, DUAN Jiang-feng2, XIONG Kai3, SU Wen-jie3
(1. School of Energy and Power Engineering, Nanjing University of Science and Technology, Nanjing 210094, China; 2. The Second Artillery Presentation Office in No. 7107 Factory, Baoji 721006, China; 3. Beijing Institute of Control Engineering, Beijing 100190, China)
A semi-physical simulation scheme was proposed for air-to-ground time-sensitive target weapon, focusing on the design of transfer alignment and GPS/INS integrated navigation algorithm. It satisfy the practical application and overcomes such problems as traditional digital simulation systems can not provide required functions and existing semi-physical simulation techniques have the disadvantages of single-function, limited interfaces and hard secondary-development. Take air-to-ground guided bomb as an example, the designed simulation system covers the whole attack period from hanging, self test, transfer alignment, thermal battery activation, data chain open, bomb dropping, attitude stabilization, wing open, glide guidance, mid-terminal handover, seeker open, terminal guidance, and target attack. To solve the problem of time delay, a time synchronization algorithm was proposed for the transfer alignment of the designed system. The semi-attack experiment shows that the designed semi-physical simulation system is effective, reliable, adequately real-time and fully functional. It provides an effective semi-practicality simulation method for the design of airborne guided weapons.
guided bomb; semi-physical simulation; transfer alignment; integrated navigation
U666.1
A
1005-6734(2015)02-0224-08
10.13695/j.cnki.12-1222/o3.2015.02.016
2014-11-26;
2015-03-02
总装预研基金(9140A31010114JB25465);国家自然科学基金资助项目(1176072);中国航天CAST创新基金(CAST2014-27);中国航空科学基金(20145159002);江苏省自然科学基金(BK20140795)
白宏阳(1985—),男,讲师,硕士生导师,从事卫星/惯性导航、图像导航技术研究。E-mail:hongyang@njust.edu.cn
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
自动化学报(2019年6期)2019-07-23
当代陕西(2018年12期)2018-08-04
电子制作(2018年1期)2018-04-04
中国惯性技术学报(2017年1期)2017-06-09
制造业自动化(2017年2期)2017-03-20
探测与控制学报(2015年4期)2015-12-15
装备环境工程(2015年5期)2015-02-28
