车轮型面位置偏移对车辆动力学性能的影响
2015-06-07 10:01李煜张剑张雪珊
大连交通大学学报 2015年1期
李煜,张剑,张雪珊
(1.大连交通大学 交通运输工程学院,辽宁 大连 116028;2.大连交通大学 土木与安全工程学院,辽宁 大连 116028)
车轮型面位置偏移对车辆动力学性能的影响
李煜1,张剑1,张雪珊2
(1.大连交通大学 交通运输工程学院,辽宁 大连 116028;2.大连交通大学 土木与安全工程学院,辽宁 大连 116028)
为了分析LMA车轮型面位置偏移对车辆动力学性能的影响,设计不同型面位置偏移量的车轮,通过轮轨接触分析和车辆动力学计算,分析了车轮型面位置偏移对轮轨几何接触特性、车辆临界速度和曲线通过性能的影响.结果表明,较小的偏移量对临界速度影响不大,当偏移量达到1.75 mm后临界速度急剧下降.以均衡速度通过曲线时,型面偏移量的增大对轮轨横向力的影响不大,但会使轮对横移量的最大值显著增大.与反相偏移相比,同相偏移对车辆在直线上的临界速度及曲线上的横移量影响更大.因此,车轮型面位置偏移对车辆动力学性能有较大影响,应当避免发生,LMA车轮型面偏移量最大不得超过1.75 mm.
车轮型面位置偏移;车辆临界速度;曲线通过性能;车辆动力学
0 引言
高速轮轨系统的研究是高速列车的关键技术之一[1],轮轨匹配关系对车辆动力学有重要影响[2],在实际运用中有许多因素会影响轮轨匹配关系,国内相关学者陆续研究了车轮踏面外形、磨耗或轮径差对地铁车辆、机车、高速列车动力学性能的影响[3- 8].Stephen Macea等[9]基于铁路货车研究了轮轨接触几何对轮对导向力的影响.Kevin Sawley等[10]基于北美铁路货车研究了车轮凹形磨耗对车辆直线运行稳定性的影响.D W Barke等[11]介绍了非圆化车轮对轨道及车辆部件寿命的影响,进一步研究发现非圆化车轮会提高车辆运行时的能耗和噪音.
本文针对实际运营中的某型动车组,考虑由于轮对镟修、安装误差以及轮轨偏磨所导致的车轮型面偏离其理想位置时,研究车辆的动力学性能变化情况.通过动力学计算,研究不同偏移量及偏移形式对车辆临界速度、曲线通过性能的影响,希望得到不同偏移形式时车轮型面位置偏移限度,为高速车辆轮对科学维护提供参考依据.
1 车轮型面位置偏移及其对轮轨接触影响
1.1 车轮型面位置偏移及偏移形式
假设轮对内侧距不变,只是由于车轮镟修和磨耗等原因导致车轮型面较其理想位置发生了偏移,偏移后的型面在以LMA型面的名义圆为坐标原点的坐标系中的位置如图1所示,即型面的形状相同,而位置向轮对内侧移动.本文针对LMA车轮型面,偏移步长取0.25 mm,最大偏移量4.0 mm,共计考虑17个车轮型面.

图1 车轮型面位置偏移示意
对于2轴转向架,有两种车轮型面偏移形式,分别是偏移发生在转向架的同侧(图2(a))和转向架的两侧(图2(b)),分别称为同相位偏移反相位偏移.
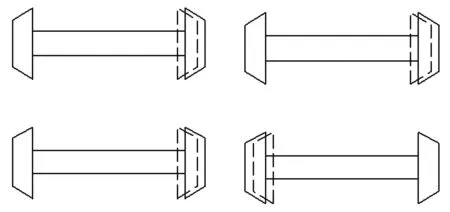
(a)同相偏移 (b)反相偏移
图2 轮对车轮型面偏移形式
1.2 车轮型面位置偏移对轮轨接触关系的影响
这里对上述车轮型面分别与60 kg/m钢轨进行接触分析和滚动圆半径差计算,计算中轮对左侧为发生型面位置偏移的车轮,右侧为LMA型面.
图3(a)为标准LMA型面随轮对横移时接触点对,轮对向右横移时接触点对上方标注的横移为正值,向左为负值.图3(b)、3(c)分别为偏移1.0、4.0 mm时左侧轮轨型面接触点对,而图3(d)则是偏移4.0 mm时右侧接触点对.
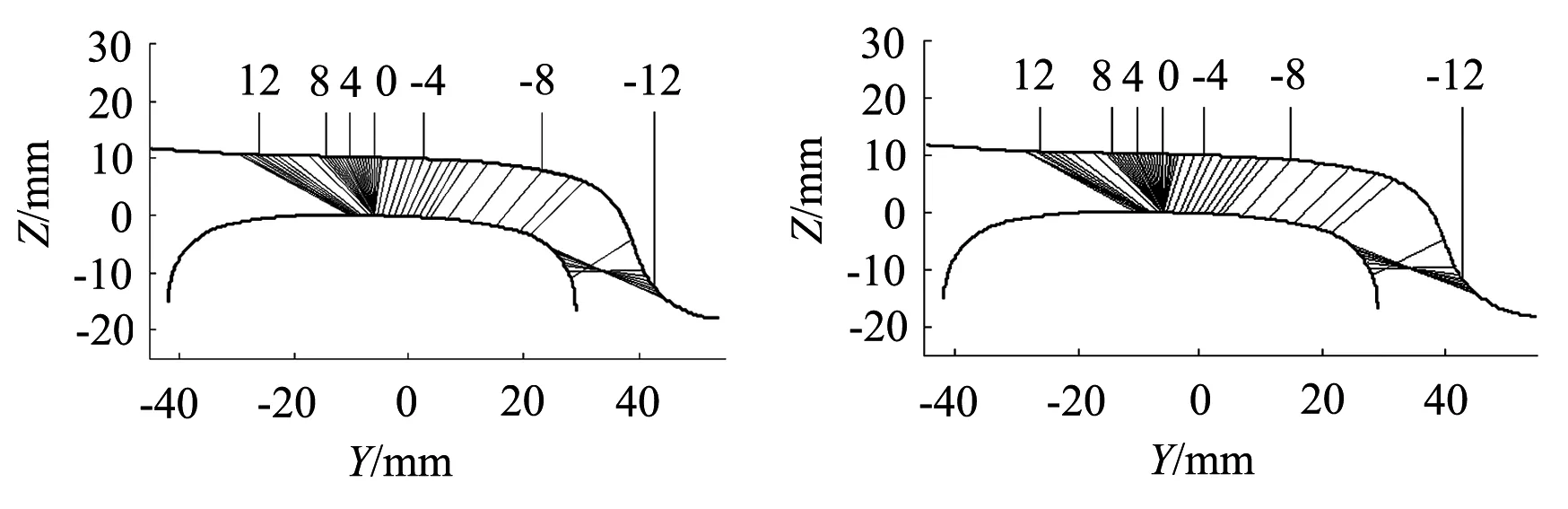
(a)CHN60/LMA(b)偏移1 mm时左侧轮轨接触点对

(c)偏移4 mm时左侧轮轨接触点对 (d)偏移4 mm时右侧轮轨接触点对
图3 不同偏移量时轮轨型面接触点对
可以看出随着偏移量的增大,轮轨发生轮缘接触时轮对横移量增大,这是由踏面向轨道内侧偏移所致.标准LMA踏面当横移量为9.5 mm时发生轮缘接触,而偏移4 mm时左侧轮轨发生轮缘接触时的横移量为13.5 mm(图3(c)).随着车轮型面位置偏移增大,轮对向右横移时,左轮轨道外侧轮轨接触点对分布不变(图3(b)),此时踏面仍以锥度1/40部分与钢轨接触,车轮型面的偏移并未改变LMA这一特性[12],而当偏移达到约4.0 mm时会与踏面外侧的反圆弧接触(图3(c)),使接触点对分布规律变化.而轮对向左横移时,随着车轮型面位置偏移增大,左轮轨道内侧轮轨接触点对变得越来越密集(如图3(a)、3(b)、3(c)),是由车轮型面的偏移(这里就是向右移)增大,导致踏面更多地以锥度1/40部分与钢轨接触.车轮型面偏移对右轮轨道内侧轮轨接触影响不大,比较图3(a)与图3(d)发现2者轨道内侧接触点分布差异不易发现,右轮轨道外侧接触变化规律及原因与左轮相同.
车轮型面偏移量对轮对滚动圆半径差的影响如图4,轮对向右横移为正.由图可见,当轮对向右横移时型面位置偏移对半径差基本无影响;向左横移时,位置偏移对半径差影响明显,随偏移量增大半径差绝对值减小,轮缘根部接触时半径差变化明显,这与轮轨接触点变化原因完全一致.轮缘根部接触时半径差较大有利于轮对通过曲线和恢复对中位置,因此,车轮型面偏移后的半径差绝对值减小将必然会对车辆曲线通过性能和临界速度产生影响.
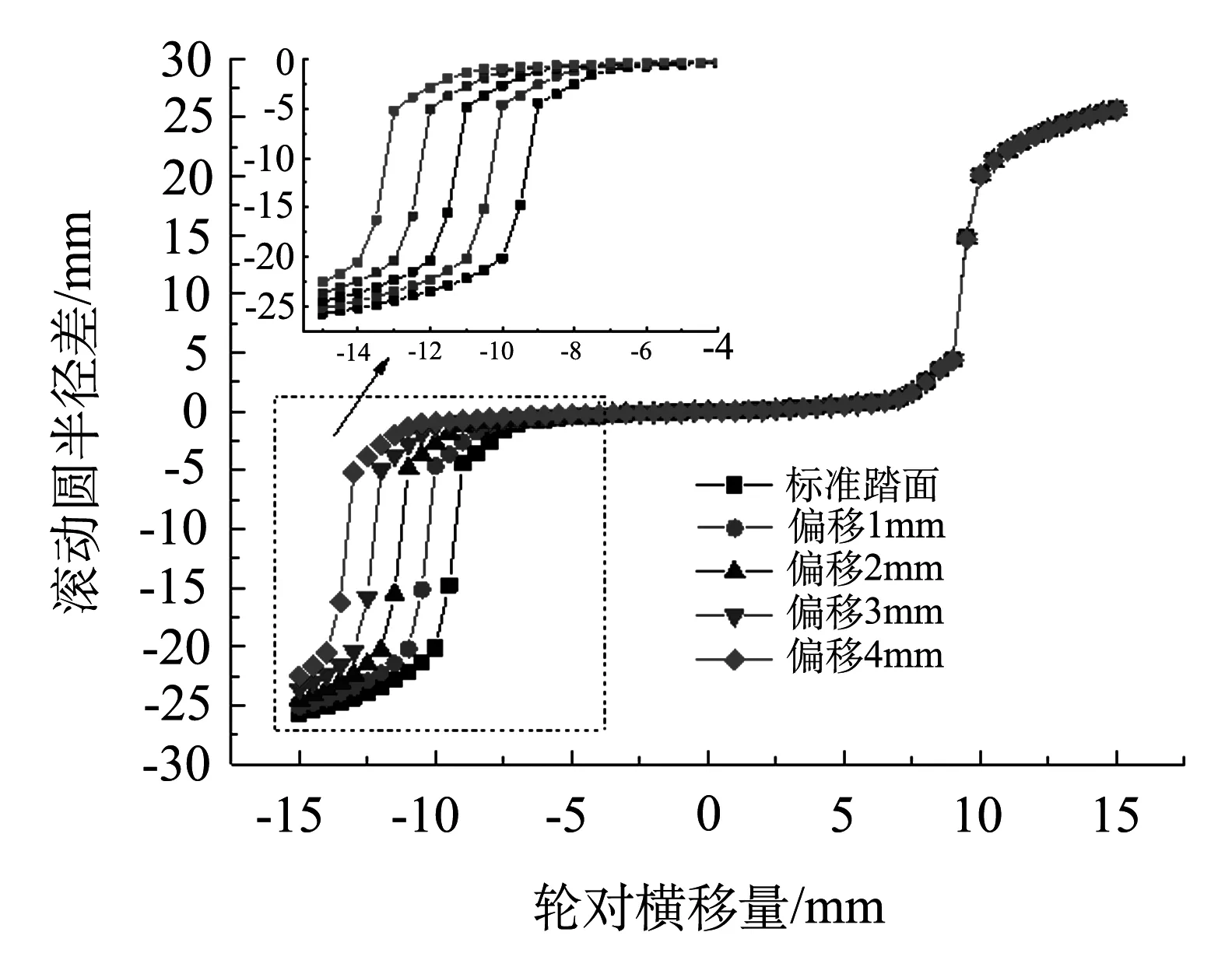
图4 半径差随轮对横移量变化情况
2 车轮型面位置偏移对临界速度的影响
利用Simpack/rail动力学软件,以某高速动车组车辆动力学参数[13]建立车辆动力学模型,对车轮型面发生偏移的模型利用时域响应法[14]计算车辆临界速度.取轨距1 435 mm、轮对内侧距1 353 mm、轨底坡1/40,车轮半径430 mm.轨道激励采用京津实测轨道谱,直线线路全长3 000 m,初始1 000 m加激励.
车轮型面位置偏移,轮对质心将不再与轨道中心线重合,将产生一定的横移量.如图5显示了偏移量为4.0 mm时,同相和反相偏移下前导轮对质心达到平衡位置时的横移量,其它各轮对规律相同.

图5 前导轮对平衡位置横移量
图6为同相偏移、运行速度为300 km/h时前导轮对质心动态横移量最大值随型面偏移量变化的情况,可以看出,随着型面偏移量的增大,横移量最大值逐步增大.据图4,LMA踏面在横移约5.0 mm时滚动圆半径差约0.5 mm,并随轮对横移量增大而增大,而偏移量4.0 mm的踏面在轮对向右横移约7.5 mm时半径差才达到0.5 mm,并且小于LMA,故车轮型面位置偏移影响了滚动圆半径差,使轮对动态恢复性能变差,进而使轮对动态横移量变大.
图6 轮对动态横移量最大值随型面偏移量变化情况
车轮型面位置偏移对车辆临界速度的影响如图7.在偏移量较小的情况下临界速度变化不大,当偏移量大于约1.75 mm时临界速度急剧下降,这是因为轮对向偏移侧横移时滚动圆半径差过小使轮对恢复对中能力变差所致.同时,同相偏移对临界速度的影响尤为严重,这是因为同相偏移时,轮对在运行过程中将向一侧横移,带动转向架也向一侧横移,这种横移不受悬挂系统的制约,反相偏移时同转向架前后轮对横移方向相反,一系悬挂会在一定程度上抑制轮对横移.因此同相偏移的情况下转向架横移量更大,而当产生较大横移后滚动圆半径差没有变大,转向架对中能力变弱,更容易蛇行运动失稳.这与文献[8]的机理相同.
图7 型面位置偏移对临界速度的影响
3 车轮型面位置偏移对曲线通过性能的影响
曲线通过计算是在一条由直线、缓和曲线、圆曲线、缓和曲线和直线构成.设置三种工况来考察车轮型面位置偏移对曲线通过性能的影响,三种工况下曲线均不加激励,车辆以接近均衡速度通过曲线.车辆通过曲线时的速度及曲线参数如表1.
表1 曲线参数设置
曲线内侧车轮型面向曲线外侧同相偏移时,各轮对最大横移量随速度、偏移量的变化如图8,这里轮对1为前导轮对,其它轮对从前向后依次编号.可以看出,车辆运行速度和型面偏移量一定时轮对横移量最大值从大到小依次为1、2、 3、 4轮对.鉴于车辆通过曲线时前导轮对工作条件最恶劣,故以下取前导轮对发生偏移的踏面进行分析.
(a)轮对1 (b)轮对2

(c)轮对3 (d)轮对4
图8 轮对最大横移量随型面偏移、车辆速度变化关系
若曲线内侧4个车轮型面发生相同偏移,通过工况1(即小半径)曲线,不同偏移量下前导轮对横移量变化如图9所示.由图可见,当车辆进入缓和曲线和在圆曲线上运行时,轮对产生向左(曲线外侧)横移,圆曲线横移量在9.0 ~9.2 mm之间,横移量基本不受偏移量影响.此时左轮接触点到达轮缘根部(图3(a)),滚动圆半径差增大且基本不受偏移的影响(图4),因此轮对横移基本不受偏移影响.但当车辆驶出圆曲线时,轮对产生短暂地晃动,向曲线内侧横移随着偏移量的增大而增大,当偏移1.75 mm时最大值约9.2 mm,比在圆曲线上横移量还大;当偏移量达到4.0 mm时,横移量最大值约11.3 mm,是因为此时内侧车轮轮轨接触点仍未达到轮缘根部(图3(c)),滚动圆半径差也不够大(图4),导向不足所致.

图9 曲线内侧车轮型面偏移时轮对横移量
曲线外侧4个车辆型面发生相同偏移,不同偏前导轮对横移量变化如图10.车辆进入缓和曲线和在圆曲线时,轮对向右(曲线外侧)横移,随着型面偏移量的增大,圆曲线轮对横移量从9.2 mm(LMA型面)增大到13.1 mm,是因为随着偏移量增大轮对滚动圆半径差变小(图4),在曲线半径相同时,轮对必须产生更大的横移量以获得足够半径差方能通过曲线.当车辆驶出缓和曲线时,轮对产生向内侧横移,横移量最大值在6.4 ~7.6 mm,明显小于图9所示情况,原因也同图9情况.
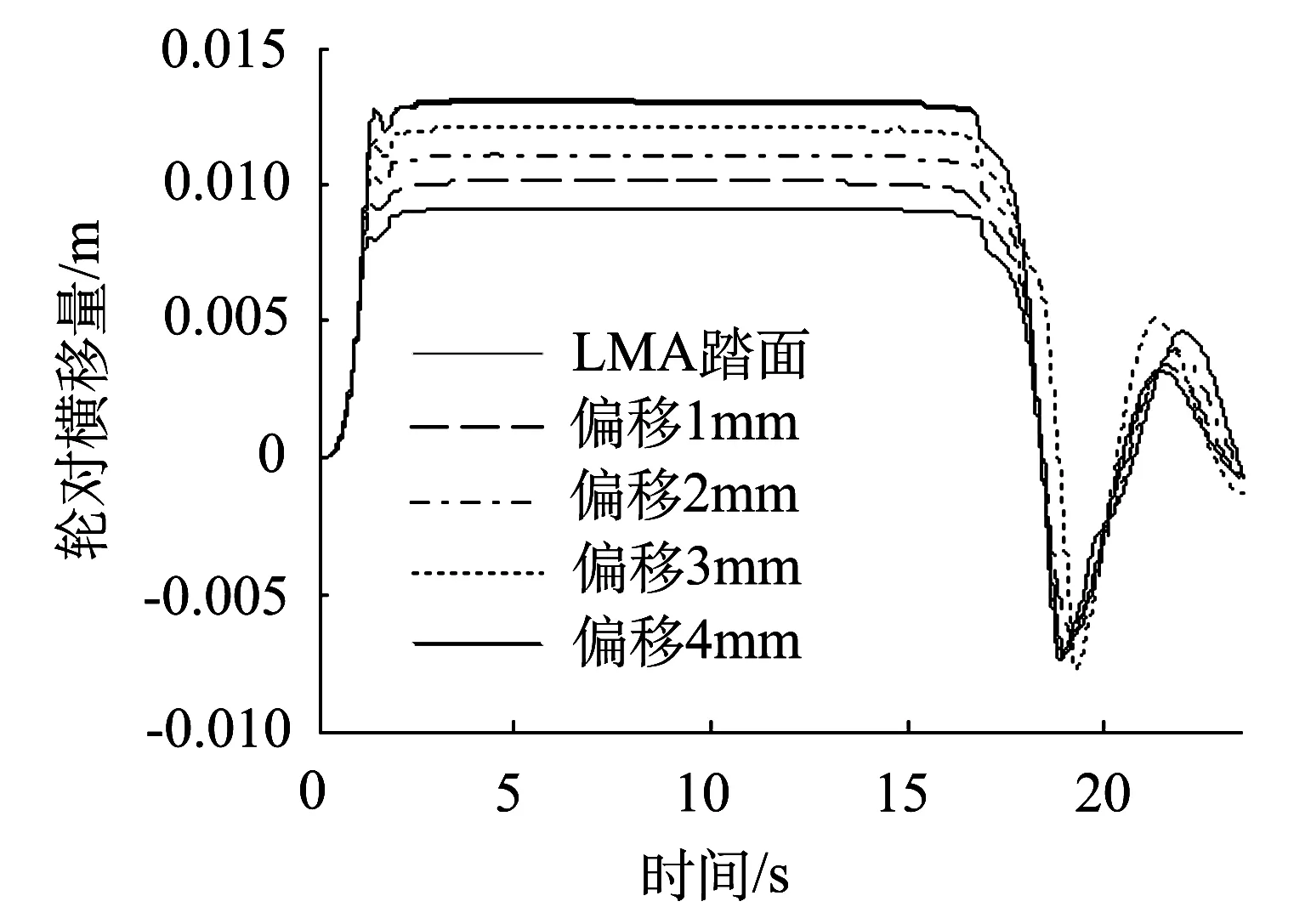
图10 曲线外侧车轮型面偏移时轮对横移量
综合考虑型面偏移量、通过曲线及方向,前导轮对横移量绝对值最大值如图11.其中,图11(a)为曲线内侧4个车轮型面发生相同偏移,最大值发生在缓和曲线末端(图9);图11(b)为曲线外侧4个车轮型面发生相同偏移,最大值发生在圆曲线(图10);4个车轮型面发生反相偏移,前导轮对曲线内侧型面发生偏移如图11(c),最大值发生在缓和曲线末端;而发生反相偏移时,前导轮对曲线外侧型面发生偏移如图11(d),最大值发生在圆曲线.

(a)曲线内侧车轮 型面同相偏移 (b)曲线外侧车轮 型面同相偏移

(c)曲线内侧车轮 型面反相偏移 (d)曲线外侧车轮 型面反相偏移
图11 前导轮对最大横移量与型面偏移、车辆速度关系
由图可见,当型面偏移量一定时,随着车辆运行速度的增大轮对横移量的最大值逐渐减小,这是由于速度较大时曲线半径也较大且缓和曲线更长(如表1),线路条件更好.车辆运行速度一定时,随着型面偏移量的增大,轮对横移量的最大值显著增大,且同相偏移(图11(a)、11(b))横移量比反相偏移(图11(c)、11(d))更大,这与直线情况一致(图5),其原因同直线情况.
曲线外侧车轮产生同相(图11(b))和反相(图11(d))偏移时,前导轮对横移量最大值发生在圆曲线,均达到13.1 mm.这与图10所示情况相同,原因也一致.而曲线内侧车轮产生同相(图11(a))和反相(图11(c))偏移时,前导轮对横移量最大值发生在缓和曲线末端,最大值分别为11.3 mm和10.5 mm,最大横移量小于外侧型面发生偏移情况,圆曲线横移量也比前者小.这与图9的情况相同,原因也一致.
相应的前导轮对外侧车轮横向力绝对值最大值如图12.图12(a)和图12(c)为曲线内侧的车轮型面发生偏移时前导轮对外侧轮横向力绝对值最大值,图12(b)和图12(d)为曲线外侧的车轮型面发生偏移时前导轮对外侧车轮横向力的最大值,四种情况下最大横向力均发生在圆曲线上,方向均向曲线内侧,此时轮对向曲线外侧横移.当型面位置偏移量一定时,随着速度的增大,横向力减小,这与轮对横移量的变化规律及原因一致(图11).当速度一定时,随着型面偏移量的增加,四种情况下轮轨横向力变化不大、甚至略有减小.由于型面位置发生偏移后轮对过曲线时轮轨间隙增大,其通过理想曲线时轮轨接触间隙剩余量增大,理论上更有利于过曲线,因此横向力没有明显增大.此外,同相偏移比反相偏移时的横向力更大,这与同相偏移与反相偏移对临界速度的影响情况一致(图7),原因也一致.
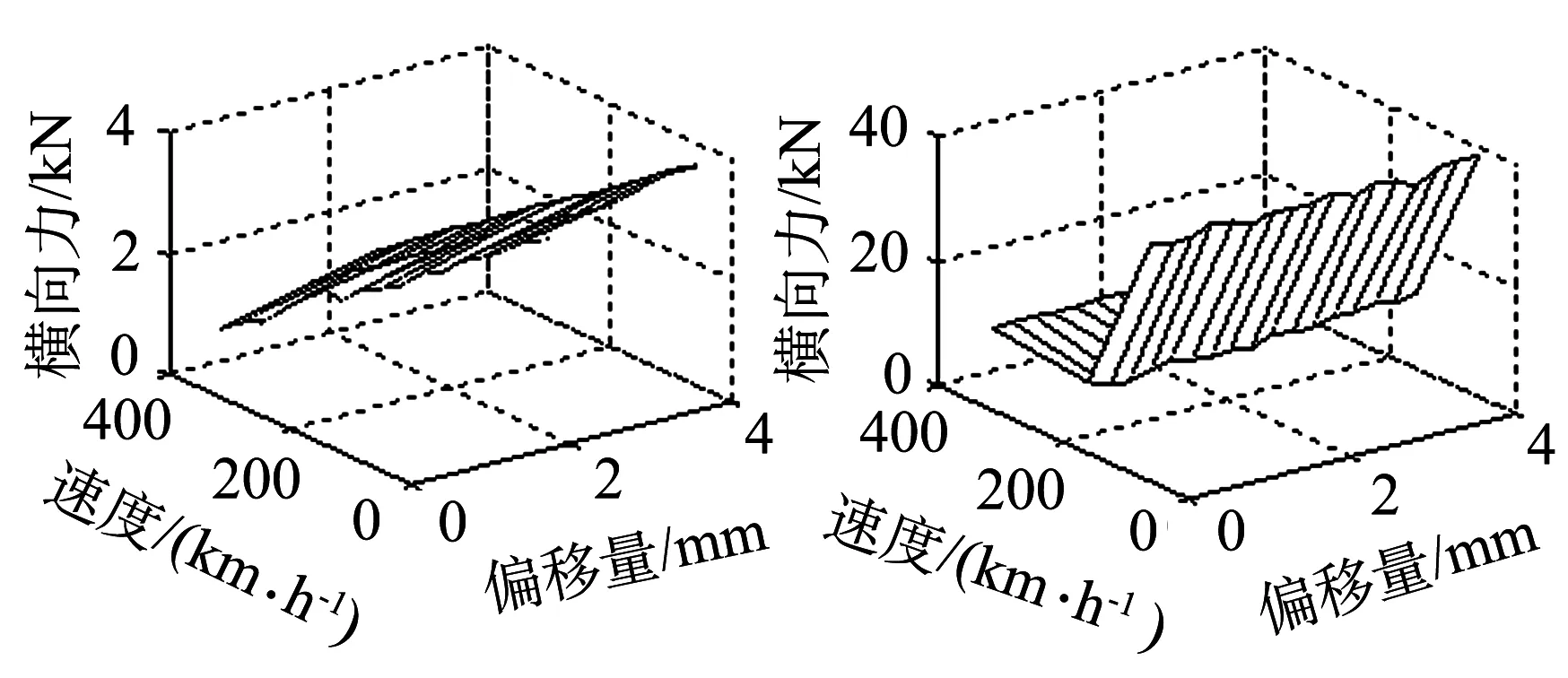
(a)曲线内侧车轮 型面同相偏移 (b)曲线外侧车轮 型面同相偏移

(c)曲线内侧车轮 型面反相偏移 (d)曲线外侧车轮 型面反相偏移
图12 前导轮对外侧车轮横向力最大值随型面偏移量和车辆运行速度变化
4 结论
上述根据LMA车轮型面通过平移设计不同位置偏移量的车轮型面,结合轮轨接触计算和车辆动力学性能分析计算可得到如下结论.
(1)型面位置偏移会影响轮轨几何接触特性,影响轮对滚动圆半径差,进而影响车辆的运行性能;
(2)较小的偏移量对临界速度影响不大,当偏移量达到1.75 mm后临界速度开始急剧下降,同相偏移比反相偏移影响更大;
(3)通过理想曲线时型面偏移量的增大对轮轨横向力的影响不大,但会使轮对横移量的最大值显著增大,且同相偏移比反相偏移的影响更大.
因此,LMA车轮型面位置偏移对车辆动力学性能有较大影响,应当避免发生,其偏移量最大不得超过1.75 mm.
[1]沈志云.关于高速铁路及高速列车的研究[J].振动、测试与诊断,1998,18(1):1- 7.
[2]张剑,肖新标,王玉艳,等.三种高速轮对型面的性能比较[J].铁道学报,2009,31(2):23- 31.
[3]董仲美,王自力,蒋海波.车轮踏面外形对机车曲线通过性能的影响[J].电力机车与城轨车辆,2006,29(2):13- 15.
[4]黄运华,李芾,傅茂海,等.踏面形状对地铁车辆动力学性能的影响[J].机车电传动,2007(1):39- 41.
[5]李艳,张卫华,池茂儒,等.车轮踏面外形及轮径差对车辆动力学性能的影响[J].铁道学报,2010,32(1):104- 108.
[6]李艳,张卫华,周文祥.车轮型面磨耗对车辆服役性能的影响[J].西南交通大学学报,2010,45(4):549- 554.
[7]黄照伟,崔大宾,金学松.轮径差对高速列车性能的影响[J].润滑与密封,2012,37(10):34- 37.
[8]黄照伟,崔大宾,杜星,等.车轮偏磨对高速列车直线运行性能的影响[J].铁道学报,2013,35(2):14- 20.
[9]STEPHEN MACE,REUBEN PENA,NICHOLAS WILSON,et al.Effects of wheel-rail contact geometry on wheel set steering forces[J].Wear,1996,191(1/2):204- 209.
[10]KEVIN SAWLEY,CURTIS URBAN,RUSSELL WALKER.The effect of hollow-worn wheels on vehicle stability in straight track[J].Wear,2005,258(7/8):1100- 1108.
[11]BARKE D W,CHIU W K.A Review of the Effects of Out-Of-Round Wheels on Track and Vehicle Components [J].Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit,2005,219(3):151- 175.
[12]中华人民共和国铁道部.TB/T 449—2003 机车车辆车轮轮缘踏面外形[S].北京:中国铁道出版社,2003.
[13]张曙光.高速列车设计方法研究[M].北京:中国铁道出版社,2009: 77- 94.
[14]翟婉明.车辆/轨道耦合动力学[M].3版,北京:科学出版社,2007: 337- 350.
Effects of Wheel Profile Position Deviation on Vehicle Dynamics Performance
LI Yu1,ZHANG Jian1,ZHANG Xueshan2
(1.School of Traffic &Transportation Engineering,Dalian Jiaotong University,Dalian 116028,China;2.School of Civil &Safety Engineering,Dalian Jiaotong University,Dalian 116028,China)
To analysis the effects of LMA wheel profile deviation on vehicle dynamics performances,wheel profiles with different position deviations were designed.By wheel/rail contact analysis and vehicle dynamics calculation,the effects of wheel profile deviation on wheel/rail contact geometry,vehicle critical speed and curving performance are studied.The results indicate that small deviation doesn’t influence greatly the critical speed,while the deviation approaches 1.75 mm,the critical speed rapid droping.During curving with balanced speed,the increase of wheel profile deviation doesn’t influence the wheel/rail lateral force very much,but the wheelset lateral displacements increases significantly.Compared with out-phase wheel profile deviation,the in-phase deviation exerts more obvious influence on vehicle critical speed and wheelset lateral displacement during curving.Thus,wheel profile position deviation has great influence on vehicle dynamics performance,which should be avoided,and the maximum position deviation of LMA profile should be within 1.75 mm.
wheelset tread offset;vehicle critical-speed;curving performance;vehicle dynamics
1673- 9590(2015)01- 0018- 06
2014- 04- 09
国家自然科学基金资助项目(51305054)
李煜(1989-),男,硕士研究生;张剑(1968-),男,教授,博士,主要从事车辆动力学及轮轨关系研究
E-mail:zhangjian@djtu.edu.cn.
A
猜你喜欢
地理空间信息(2022年3期)2022-04-01
福建基础教育研究(2020年1期)2020-05-28
制造技术与机床(2019年9期)2019-09-10
中国铁道科学(2019年3期)2019-06-04
制造技术与机床(2019年4期)2019-04-04
自然资源遥感(2018年3期)2018-09-04
网络安全与数据管理(2018年8期)2018-08-27
制造技术与机床(2017年7期)2018-01-19
湖南工业职业技术学院学报(2017年3期)2017-07-18
山东工业技术(2016年15期)2016-12-01