极限工况下车道保持系统的行驶稳定性研究
2015-06-23 16:22单崚杉
上海理工大学学报 2015年2期
单崚杉, 孙 涛
(上海理工大学机械工程学院,上海 200093)
极限工况下车道保持系统的行驶稳定性研究
单崚杉, 孙 涛
(上海理工大学机械工程学院,上海 200093)
车道保持控制系统可以辅助驾驶员对车辆的操纵,避免其发生偏离车道、碰撞障碍物等危险情况,通常认为该系统工作在轮胎的线性区段.然而,车道保持中的关键控制变量(方向偏差和侧向偏差)与车辆稳定性关系密切,能够在极限工况下起到稳定车辆的作用.为此,设计了基于人工势场法的车道保持控制算法,在线性车辆模型的基础上将线性轮胎模型扩展为非线性轮胎模型.仿真结果表明,当车辆受到突然的转向干扰时,车道保持控制算法在极限工况下依然能使车辆有效跟踪目标路径,并且保持车辆的稳定性.
车道保持;行驶稳定;人工势场;非线性轮胎
随着汽车在当今社会生活中的日益普及,驾乘安全性和操控的便利性正受到越来越多的重视.长期以来,诸如避免车辆碰撞障碍物以及避免车辆发生车道偏离等与车辆周边环境相关的驾驶安全任务主要依靠驾驶员来完成,这无疑增加了驾驶员的工作强度和负担.为此,车道保持辅助系统的出现在一定程度上缓解了驾驶强度,辅助驾驶员实现车道的跟踪,并适时提供车道偏离预警,从而提升驾乘的安全性.
然而,像车道保持控制系统这样的驾驶辅助系统一般都是工作在常规行驶条件下的轮胎线性工作区域,这已经由车辆工程领域的专家学者进行了诸多研究.Horiuchi等[1]根据广义预测理论(GPC)设计了一种基于理想虚拟驾驶员概念的新型驾驶员辅助系统,帮助驾驶员实现车道跟踪控制任务.Minoiu等[2]设计了一种转向控制器,当驾驶员精力不集中时发挥作用.Enache等[3]通过后轮转向的方式实现控制车辆路径保持的目的,并用线性矩阵不等式方法对后轮转向的作动范围加以优化,取得了良好的控制效果.
可是,当车辆处于极限工况下,驾驶员更需要驾驶辅助系统辅助其作出迅速正确的判断,规避由于慌张惊恐造成的误操作,从而降低交通事故发生率.如果能够将车道保持系统的作用范围从常规工况拓展到极限工况,势必会极大提升车道保持系统的使用范围,给驾驶员带来更大益处.斯坦福大学Hindiyeh等[4]设计了基于GPS传感器的实车试验,结果表明,通过方向偏差反馈的方式能够在极限工况下有效地保证车辆的横摆稳定性.Benine-Neto等[5]针对整个轮胎侧向力作用范围,提出了分段仿射输出反馈控制器,按照ISO-3888-2双移线标准进行仿真.仿真结果表明,当轮胎进入大侧偏角的非线性区域时,在反馈控制器的干预下,车辆能够保持稳定并且出色地完成双移线试验.
本文主要采用人工势场法,它的基本思想是车辆在周围环境中运动,设计一种抽象的人造力场,使车辆在目标路径附近时作用力较小;当车辆远离目标路径时,产生较大的作用力使车辆重新回到目标路径上来.由于人工势场法在数学形式上美观简洁,因此在车辆控制领域受到广泛应用.根据人工势场法设计了车道保持控制算法,分析了车道保持和车辆稳定性的耦合关系,在线性车辆模型的基础上将线性轮胎模型扩展为非线性轮胎模型.最后通过仿真试验,验证了所设计的车道保持系统在极限工况下不但能使车辆有效跟踪目标路径,并且对车辆的横摆运动有稳定作用.
1 车道保持控制系统
1.1 车辆模型
为了突出车辆的横摆和侧向运动,忽略了车辆的纵向运动和垂向运动,认为车辆的前进速度ux不变,车厢只作平行于地面的平面运动,不考虑空气阻力的影响,只保留沿y轴的侧向运动和绕z轴的横摆运动两个自由度[6].二自由度车辆动力学方程为
式中,αf为前轮侧偏角;αr为后轮侧偏角;Cf为前轴等效侧偏刚度;Cr为后轴等效侧偏刚度.
1.2 控制器设计
本文的控制算法建立在人工势场的基础上.选取势函数应满足两个条件:a.在目标路径附近势函数应该有较小的数值,以便驾驶员当车辆行驶在目标路径附近时能自主控制车辆行为;b.势函数的微分应该是连续的.考虑文献[8],取定势函数为
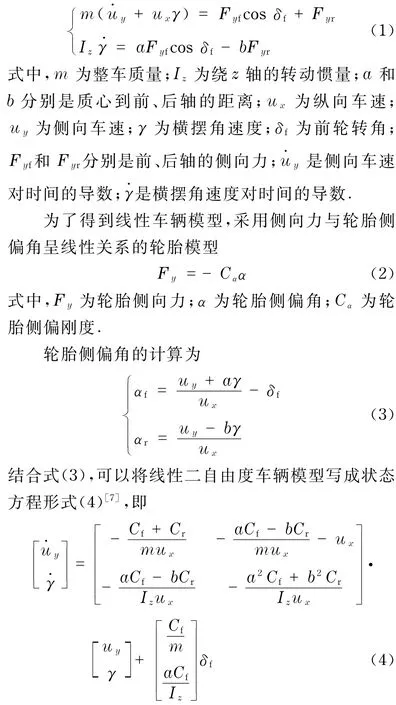
Vc(ela)=k(ela)2=k(e+(a+xla)sinψ)2(5)式中,e为侧向偏差;ψ为方向偏差;xla为前视距离;k为势场增益;ela为前视点距道路中心线的距离,如图1所示.显然这个势函数满足上述两个条件.
图1 方向偏差与侧向偏差的定义Fig.1 Definition of heading error and lateral error
结合图1可知,施加在车辆上的控制力是势场增益k乘以前视点距道路中心线的距离ela.ela包含了方向偏差和侧向偏差的信息,并且是它们的递增函数.在这个控制律下,方向偏差ψ和侧向偏差e越大,控制回复力就越大,于是把车辆“拽”回目标路径的趋势也就越明显,使得车辆具有跟踪目标路径的能力.
车道保持可以通过主动前轮转向干预调节来实现,只需将控制力转换成前轮控制转角,结合车辆模型,定义前轮控制转角为


最终的前轮转角是驾驶员输入δd与控制转角输入δc之和,即对于车道保持问题,方向偏差ψ与侧向偏差e是关键的两个控制变量,并且在固定于路面上的全局坐标下更容易说明问题.选取状态变量为x=[e,ψ,e·,ψ·]T,假定目标路径是直线道路并运用小角度假设,将式(4)改写成全局坐标下的状态方程形式为

1.3 车道保持和车辆稳定性的耦合关系
从以上系数矩阵A和Ac的对比发现,A矩阵中,状态导数¨e和¨ψ的表达式的系数与侧向偏差e无关.同时,与方向偏差ψ有关的系数(Cf+Cr)/m,(aCf-bCr)/Iz,一个恒为正数,另一个与车辆的转向特性有关,起不到控制车辆的作用,无法让车辆跟踪目标路径或者回归到目标路径上来.在矩阵Ac中,关于状态导数¨e和¨ψ的表达式的系数多了与侧向偏差e有关的负值项-2k/m和-2ak/Iz,以及与方向偏差ψ有关的负值项-2k(a+xla)/m和-2ak(a+xla)/Iz.在这些系数的作用下,车辆具备了车道保持的能力,一旦发生突然的转向干扰,方向偏差和侧向偏差能够迅速收敛于零.
另外,车辆稳定性控制系统(如ESC)和车道保持控制系统有类似的稳定车辆横摆运动的作用.前者以车辆本身的运动状态横摆角速度γ和质心侧偏角β作为控制变量,以参考车辆模型输出的名义横摆角速度γ*和名义质心侧偏角β*作为参照,将实际值与名义值进行比较,从而实现车辆稳定.后者将车辆外界的环境变量方向偏差ψ和侧向偏差e作为控制变量,以跟踪目标路径作为准则,减小方向偏差,进而产生对横摆运动的稳定效应.
1.4 前视距离xla的选取
在车道保持系统中,前视距离xla是一个重要参数,它的不同取值会影响到系统的稳定性.图2(a)和图2(b)分别是具有不足转向特性的车辆和具有过多转向特性的车辆当前视距离xla从1 m变化到70 m时的特征值分布.从中可以看出,无论是不足转向车辆还是过多转向车辆,当前视距离从1 m(对应图中大一号的标记)开始变化时,系统有位于右半s平面的特征值,这时系统是不稳定的;当前视距离接近70 m时,系统有位于负实轴的特征值,这影响了系统的动态性能.
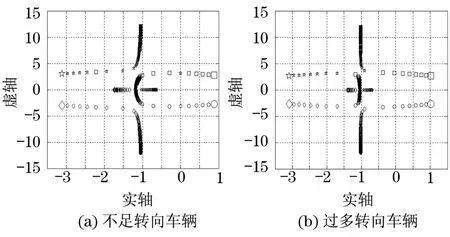
图2 被控车辆特征值分布Fig.2 Eigenvalue distribution of the controlled vehicle
可见,前视距离xla的选取对车道保持的控制效果是非常重要的.这里取前视距离为xla=(Cf+ Cr)/2k,在该取值下,车道保持系统总是稳定的.
2 车辆模型的非线性化
2.1 非线性轮胎
为验证车道保持系统在极限工况下的控制作用,需要考虑非线性轮胎的饱和区段.一般的非线性轮胎模型,如魔术公式[9]或者Burckhardt轮胎模型[10],其数学表达式复杂并且参数较多,不利于计算机仿真.为了既能体现轮胎的非线性特征,又兼顾计算机仿真的需要,本文采用文献[11]提供的方法,将式(2)改写为

式中,Cα的意义与式(2)中的一致,表示轮胎在线性区段时的侧偏刚度.系数η会根据轮胎侧偏角α的不同在0~1之间变化,相当于从定刚度轮胎转换为变刚度轮胎.图3给出了4种典型路面下η与轮胎侧偏角α的关系,可见η是关于α的单调递减函数,随着α不断增大,η越趋近于零,轮胎也越趋近于饱和.引入变系数η后,车辆就有了具有饱和特性的非线性轮胎.
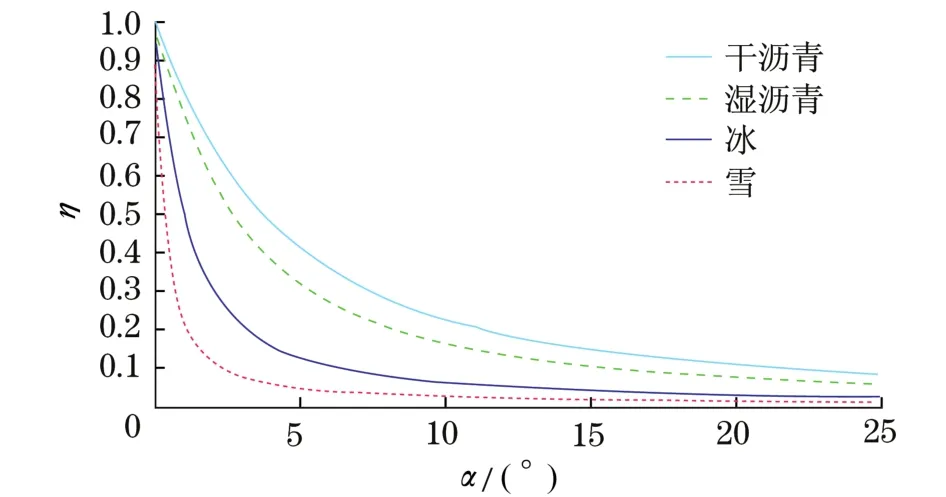
图3 η与轮胎侧偏角的关系Fig.3 Relationship betweenηand tire slip angleα
2.2 非线性车辆模型
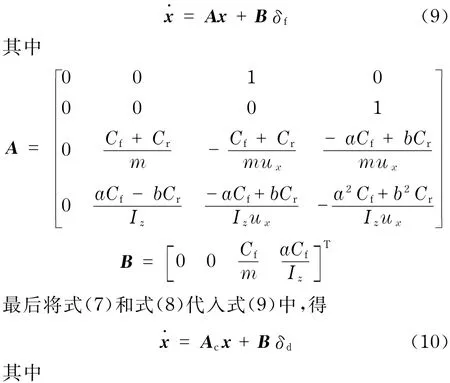
式(11)表示的非线性轮胎模型形式简单,并且体现了轮胎在大侧偏角时的饱和特性,这使得它能够很容易地与式(9)所示的线性模型结合起来,最终构成非线性车辆模型.将式(11)代入式(1),根据小角度假设和直线目标路径假设转换成全局坐标下的形式,最后将式(7)和式(8)代入得到

其中

式(12)即为具有车道保持功能的非线性车辆模型.
2.3 非线性车辆模型的稳定性
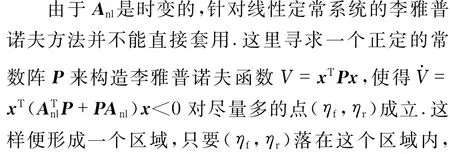
对于非线性模型式(12),可将系统矩阵Anl= Anl(ηf,ηr)看作是关于参数ηf,ηr的时变系统.虽然式(12)是非线性的,但在形式上与线性系统非常相似.为了说明其稳定性,采用李雅普诺夫稳定性理论.

为了实现这个问题,调用Matlab凸优化工具箱CVX[13].经计算,得到的结果如图4所示.图中,每个“”标记表示一个矩形区域的角点(ηf,min,ηr,min),在该区域中系统是稳定的.当点(ηf,ηr)从一个区域进入另一个区域时,相应有另一个矩阵P保证稳定性.所以,图4中“”标记连成曲线的右上方区域,在该区域系统都是稳定的.
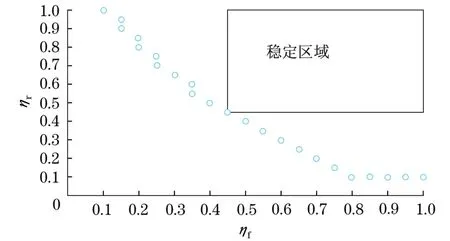
图4 非线性模型的稳定区域Fig.4 Stability region of the nonlinear model
3 仿真试验与分析
为了验证车道保持系统在极限工况下的控制效果,对某车在Simulink环境中进行仿真分析.车辆参数为:m=2 045 kg,Iz=5 438 kg·m2,a= 1.488 m,b=1.712 m,Cf=77 850 N/rad,Cr= 66 000 N/rad,k取值为3 500 N/m.
在湿沥青路面上,车辆以100 km/h的车速跟踪一条直线路径,随后驾驶员突然施加时长为1 s、幅度为10°的转向输入,以其作为干扰输入触发车辆发生不稳定工况,观察有、无控制车辆的运动情况.仿真结果如图5—8所示,图中,t表示时间.
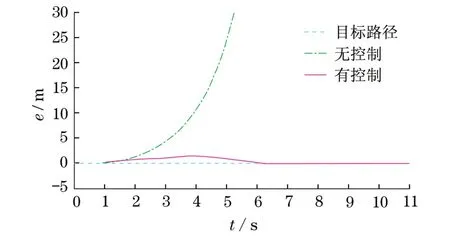
图5 侧向偏差对比Fig.5 Comparison of lateral errors
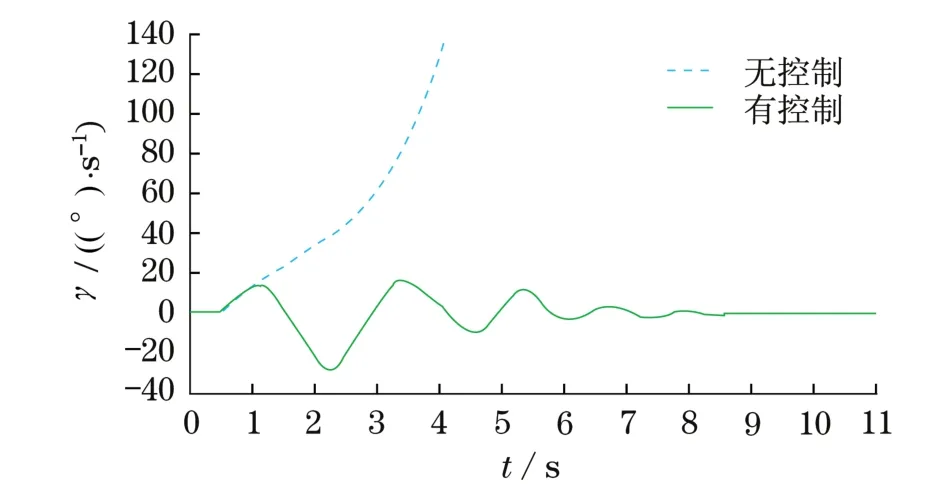
图6 横摆角速度对比Fig.6 Comparison of yaw rates
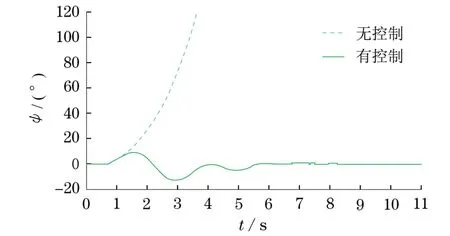
图7 方向偏差对比Fig.7 Comparison of heading er rors

图8 前轮转角对比Fig.8 Comparison of frontwheel angles
图5显示了侧向偏差的对比.有控制时,虽然转向扰动使车辆偏离了原来的行驶路径,不过在车道保持系统的作用下,很快修正了偏离行为,恢复了对目标路径的跟踪;而没有控制的车辆根本无法跟踪目标路径,侧向偏差迅速增大.
在横摆角速度的对比中(图6),有控制的车辆在几次振荡后很快恢复为0(°)/s;没有控制的车辆横摆角速度达到了140(°)/s,车辆发生剧烈横摆运动,失去了稳定性.
使车辆稳定的控制机制是由车道保持算法依据方向偏差的变化使转向机构迅速产生一个与车辆激转方向相反的前轮转向,在这个前轮转向的作用下保证车辆的稳定性.从图7和图8看到,当方向偏差有急剧增大的趋势时,前轮快速反向转向,在1 s内幅度达到了30°.此外,如此迅速、大幅度的转向操作若是没有车道保持系统的干预,一般驾驶员仅凭驾驶经验是很难完成的,这也体现了车道保持系统在极限工况下可以稳定车辆的优点.
4 结束语
设计了基于人工势场法的车道保持控制算法,在线性车辆模型的基础上,将线性轮胎扩展为变刚度的非线性轮胎.研究结果表明,没有车道保持控制的车辆在突然的转向干扰下,车辆运动状态剧烈变化,无法跟踪目标路径,失去了稳定性;具有车道保持功能的车辆即使在极限工况下,依然能使车辆有效跟踪目标路径,并且保持车辆稳定性.
[1] Horiuchi S,Sunada K.Synthesis of driver assistance system for lane-following using generalized predictive control[C]∥Proceedings of AVEC.Tokyo:Society of Automotive Engineers of Japan,1998:467-472.
[2] Minoiu N,Netto M,Mammar S,et al.A switched optimized approach for road-departure avoidance: implementation results[C]∥Intelligent Vehicles Symposium,2007 IEEE.Piscataway:IEEE,2007: 787-792.
[3] Enache N M,Guegan S,Desnoyer F,et al.Lane keeping and lane departure avoidance by rear wheels steering[C]∥Intelligent Vehicles Symposium,2012 IEEE.Piscataway:IEEE,2012:359-364.
[4] Hindiyeh R Y,Talvala K L R,Gerdes J C.Lanekeeping at the handling limits[C]∥Proceedings of the International Symposium on Advanced Vehicle Control 2008.Kobe:Kobe International Conference Center,2008.
[5] Benine-Neto A,Mammar S.Piecewise affine output feedback controller for vehicle lane keeping[C]∥American Control Conference,2012 IEEE.Piscataway: IEEE,2012:6533-6538.
[6] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
[7] 于长官.现代控制理论[M].哈尔滨:哈尔滨工业大学出版社,1988.
[8] Rossetter E J.A potential field framework for active vehicle lanekeeping assistance[D].Stanford:Stanford University,2003.
[9] Pacejka H.Tyre and vehicle dynamics[M]. Amsterdam:Elsevier,2005.
[10] Kiencke U,Nielsen L.Automotive control systems:for engine,driveline,and vehicle[M].New York: Springer,2005.
[11] Talvala K L R,Gerdes J C.Lanekeeping at the limits of handling:stability via Lyapunov functions and a comparison with stability control[M].New York: ASME,2008.
[12] Boyd S,Feron E,Balakrishnan V,et al.Linear matrix inequalities in system and control theory[M]. Philadelphia:SIAM,1994.
[13] Grant M,Boyd S.CVX:Matlab software for disciplined convex programming[EB/OL].[2013-07-24]. http:∥cvxr.com/cvx.
(编辑:丁红艺)
Stability Potentials of Lanekeeping Control System at Critical Driving Conditions
DANLingshan, SUN Tao
(School of Mechanical Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
A lanekeeping control system intends to aid driver in order to avoid such risky situations as lane departure and obstacle collision.The lanekeeping control system usually works in the linear area of normal tires.However,two key control variables of lanekeeping control,i.e.,heading error and lateral error,have close relationship with vehicle stability.The successful control of these two variables can exert a stabilizing influence on vehicle yaw dynamics in critical situations.A lanekeeping algorithm was proposed based on the artificial potential field method,and then the linear tires models were extended to nonlinear ones on the basis of the linear vehicle model.The simulation results demonstrate that under the abrupt disturbance of steering,the lanekeeping algorithm enables the vehicle follow the planned path and provides a stabilizing influence on vehicle yaw motion even at critical driving conditions.
lanekeeping;driving stability;artificial potential field;nonlinear tire
TP 391.9
A
1007-6735(2015)02-0149-06
10.13255/j.cnki.ju sst.2015.02.010
2013-12-09
上海市科研创新重点资助项目(12ZZ145)
单崚杉(1987-),男,硕士研究生.研究方向:车辆系统动力学与电子控制.E-mail:sensation_all@126.com
孙 涛(1974-),男,副教授.研究方向:车辆系统动力学与电子控制.E-mail:tao_sun531@163.com
猜你喜欢
卫星应用(2021年11期)2022-01-19
北京航空航天大学学报(2021年4期)2021-11-24
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
童话世界(2019年14期)2019-06-25
幼儿教育·父母孩子版(2017年12期)2018-02-28
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
橡胶工业(2015年4期)2015-07-29