电磁导向智能车设计探讨
2015-06-24 23:07鞠宝锋等
中国高新技术企业 2015年23期
关键词:微控制器
鞠宝锋等
摘要:文章主要介绍了以MK60DN512VLQ10微控制器为核心控制单元的电磁导向智能车。其使用6*8mm 10mH工字型电感进行路况采集,通过舵机打角、双电机差速实现对智能车方向控制和速度控制;采用干簧管对起跑线进行检测,实现停车控制。电磁导向智能车的设计及开发过程中主要涉及车模机械结构调整、控制算法的开发、信号采集放大电路和电机驱动电路的设计。
关键词:微控制器;智能车;电磁导向;PID;电磁传感器 文献标识码:A
中图分类号:TP242 文章编号:1009-2374(2015)25-0014-02 DOI:10.13535/j.cnki.11-4406/n.2015.25.007
1 设计思路及方案的总体说明
电磁引导智能汽车利用麦克斯韦电磁场理论,通过100MA的电磁传感器采集线交流电产生的电磁场测试路径。电感采集的电压经过信号放大、检波和整流输入单片机,实现对中心线的提取。智能车采用PID进行速度控制,PD进行方向控制。其通过中心线的提取判断车身角度,并结合路况的不同,通过舵机打角、电机差速为小车选取最优路径。
根据智能车系统的基本要求,我们设计了系统结构图,如图1所示:
2 机械结构设计
2.1 主销后倾角
主销后倾角安装在前轴,主销上面稍微向后倾斜角度。它使车辆离心力形成产生的转矩和车轮的方向相反的方向转变,迫使车轮偏转后自动恢复到其原始位置在中间。主销后倾角较大,速度越高,前轮的稳定性更好。汽车主销内倾和连铸机自动校正,维持一个连续函数。调整主销后倾角为1°~3°。
2.2 主销内倾角
主销内倾是内置的主销内倾角,前角略其作用在于前轮自动回正,掩埋的前轮自动回大点的积极作用,而且越猛越费力,轮胎磨损增大角度;相反,前轮自动回正少作用越弱。主销后倾角调节一般不超过8°。
2.3 前轮外倾角
在汽车横向平面内,前轮外倾角中心策略,作为平前轮外倾。使前轮外倾,一方面对垂直滚动的车轮在路面,减小阻力,滑动小车向前;另一方面减小轴承锁紧螺母和货物,增加寿命,提高安全水平。前轮外倾通常为1°左右,但高速急转弯到汽车前轮外倾,甚至可以减少负。
2.4 前轮前束
看下面的轮子,汽车的两个前轮的转动平面不平行,但小的角度来看,这种现象称为前轮前束。车轮前束的作用是减轻或消除因前轮外倾角所造成的不良后果,二者相互协调,使前轮在汽车行驶中滚动而无滑动。本智能车将主销后倾设为最大来获得足够的稳定性,适当的主销内倾,前轮外倾保持0°和微前束。
2.5 传感器的安装
通过实验我们得出:增大智能车的前瞻,可以使小车预判提前,留给单片机更多调整小车的时间,但前瞻过长会造成车体转弯后摆,因此选择坚固、较轻的支架架设传感器并且选择合适的前瞻距离,才会使小车获得足够的预判和合理的重心。采用尽量架宽传感器的方案,以获得丰富的车道信息,并且提前预知车道形状。对称水平电感只能实现直道和一般弯道的检测,为实现对多样道路的检测,应采用水平与竖直电感相结合的布置方案。电感一定要尽可能水平放置,减小数据采集
误差。
3 硬件系统设计及实现
3.1 单片机最小系统板
MK60DN512VLQ10是K60系列MCU。Kinetis系列微控制器是Cortex-M4系列的内核芯片。最小系统使用K60 144PIN封装,为节省电路板空间,主板上仅将本系统所用到的引脚引出,包括PWM接口、计数器接口、外部中断接口、若干普通IO接口,如图2所示:
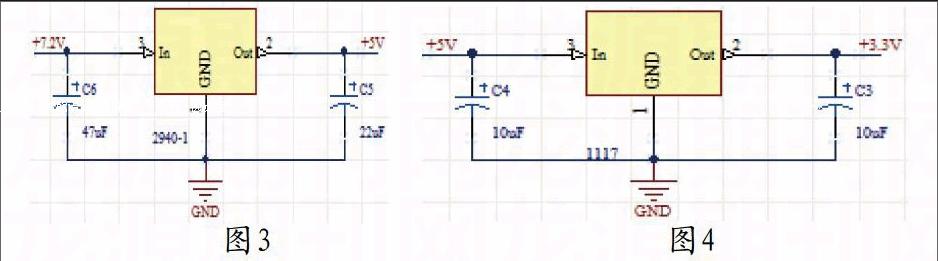
3.2 电源模块
采用lm2940将7.2V电源电压变为5V供给电机驱动与舵机(如图3所示),用lm1117将5V电压变为3.3V供给单片机与LCD(如图4所示)。
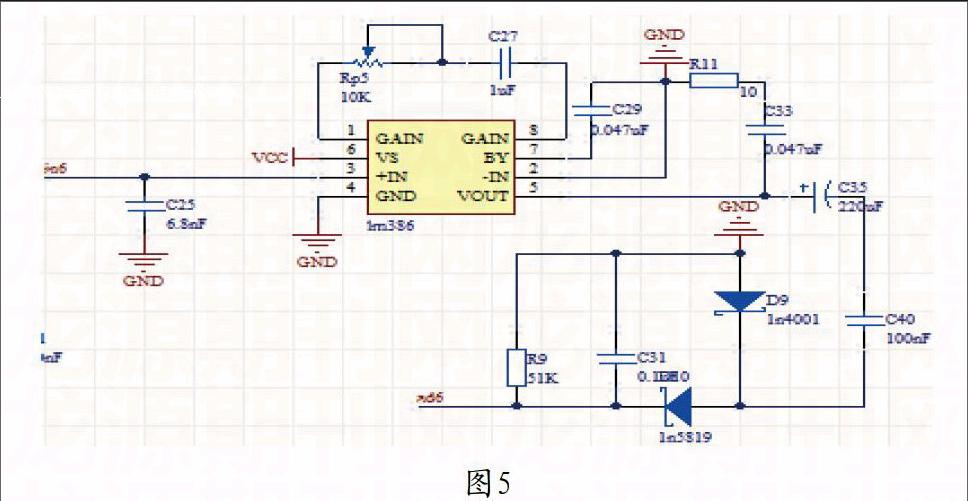
3.3 放大电路和检波电路的设计
因为电感感应出的电动势非常小,且是差分信号,所以必须把电感采集的数据进行放大、整流、滤波,然后将信号输给单片机。放大电路采用LM386集成电路放大、整流、滤波,如电路图5所示:
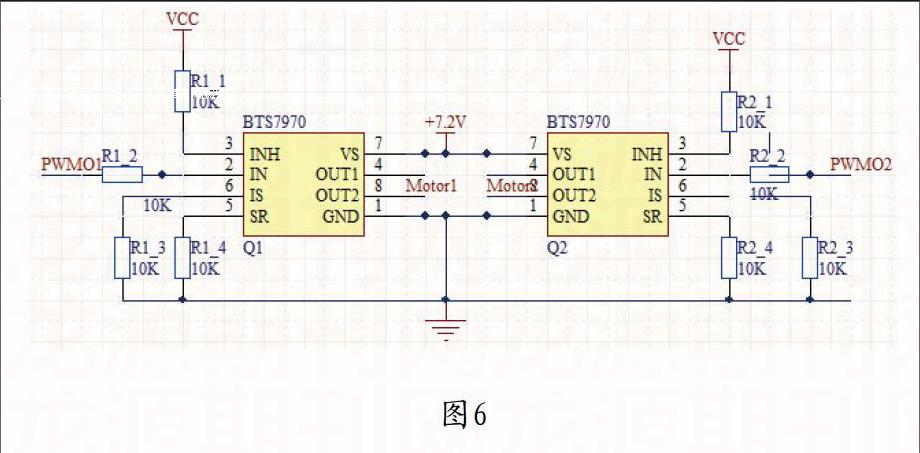
3.4 电机驱动模块设计
电机驱动模块采用BTS7960,该芯片带有电流检测与诊断,压摆率调整,死区保护,过热、过压、过流和短路保护,能够支持高达25kHz的PWM输入,具有极低的内阻的特点。电机驱动模块电路图6:
4 软件系统设计及实现
4.1 赛道信息的采集及数据归一化处理
4.1.1 赛道信息的获取。通过模拟测试。根据收集到的A/D值、合理的操作和导体的位置判断,这种方法使空间分辨率可达2毫米,对当前的变化影响较小,适合汽车稳定性测试需求。
4.1.2 数据归一化处理。将A/D的值做数据归一化,计算出各个传感器的相对位置,通过加权的方式最后计算出导线的位置,信号归一化的公式如下:
相对值=[(测量值-最低值)/(最高电压-最低电压)]*100%
4.2 控制算法
4.2.1 舵机的PD控制。根据电磁传感器采集到的偏移量,利用前后几次偏移量之差进行PD控制。
舵机转角为:
α=Kp*b+Kd*Diff
式中:Kp为比例系数;b为相对于中心的偏移量;Kd为积分系数;Diff为位置微分量。
4.2.2 电机的PID控制。对于速度控制,采用了增量式PID控制算法,基本思想是直道加速,弯道减速。对于速度的控制策略:在小偏差范围内不进行差速处理,只由舵机打角进行车身校正,当小车偏离车道较大时,根据给定小车的运行速度,两车轮轮速配合舵机打角适当差速的控制方法,偏大车身晃动而造成的速度丢失,同时保证了直道上的直线行驶。
5 结语
本文是基于MK60DN512VLQ10单片机,电磁信号基础上讨论一种电磁导向智能车,涉及控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,以实现让车模能够自动寻迹并自动控制运动,最终实现小车智能化。电磁导向智能车是未来汽车发展的一个
方向。
参考文献
[1] 卓晴,黄开胜,邵贝贝.学做智能车——挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[2] 邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004.
[3] 蔡述庭.“飞思卡尔杯”智能汽车竞赛设计与实践——基于S12XS和KinetisK10[M].北京:北京航空航天出版社,2012.
作者简介:鞠宝锋(1992-),男,山东潍坊人,山东理工大学学生,研究方向:车辆工程。
(责任编辑:周 琼)
猜你喜欢
电子制作(2017年14期)2017-12-18
九江学院学报(自然科学版)(2015年1期)2015-11-12
电子设计工程(2015年15期)2015-02-27
单片机与嵌入式系统应用(2014年8期)2014-03-23
单片机与嵌入式系统应用(2014年9期)2014-03-11
电子设计工程(2014年18期)2014-02-27