
基于天文导航惯导姿态误差解算
2015-06-27 05:45李践飞黄义顺
船电技术 2015年6期
李践飞,黄义顺,韩 凯
(1. 海军潜艇学院,山东 青岛 266042;2. 海军青岛航保修理厂,山东 青岛 266071)
基于天文导航惯导姿态误差解算
李践飞1,黄义顺2,韩 凯1
(1. 海军潜艇学院,山东 青岛 266042;2. 海军青岛航保修理厂,山东 青岛 266071)
本文利用天文导航和ψ方程,提出了一种测量惯导姿态误差的方法。分析表明:该方法简单可靠,
测量精度高,实用强。
天文导航 姿态 ψ方程 惯导
0 引言
天文导航系统主要装备于大型舰船,一般由星体跟踪器、电子机柜和电气机柜组成。它测量星体相对于水平面的高度角与相对北向的方位角确定舰船的位置及姿态,用来校正惯性导航系统的位置误差和航向误差(图1为其结构框图)。
其工作过程如下:星体跟踪器通过电气机柜驱动机构与惯导惯性平台机械连接,在工作过程中导航系统把当地GPS经纬度、惯导经纬度传给天文导航系统电子机柜计算机,计算被观测星体精确的高度角h和方位角A。在天文导航系统电子机柜和电气机柜驱动控制下,星体跟踪器跟踪星体并测量出该星体的高度角h和方位角A。
从以上过程可以知道惯导惯性平台是天文导航系统测量的水平基准,因此我们可以利用天文导航方法求出惯导的姿态误差,对惯导工作正确性作出评价。

图1 天文导航系统结构框图
1 基于天文导航惯导姿态测量方法
1.1 由GPS位置计算星体精确的高度角hG和方位角AG
利用GPS位置,根据天文导航方法,可以得到星体高度角hG和方位角AG可由下式求得:

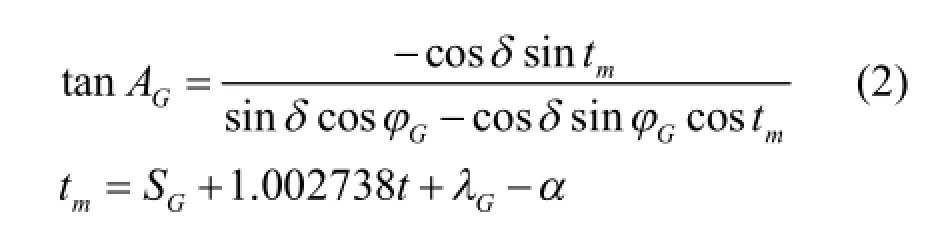
式中:α为星体的赤经,由自动星历表获得;δ为星体的赤纬,由自动星历表获得;φG为纬度,由GPS提供;λG为纬度,由GPS提供;t为世界时,由时间系统提供;SG为世界时零时的恒星时,由自动星历表获得。
1.2 由惯导计算机坐标系计算星体的高度角hc和方位角Ac
由于惯导提供的经纬度是在计算机坐标系内计算的,根据天文导航方法,可以得到星体高度角hc和方位角Ac,由下式求得:
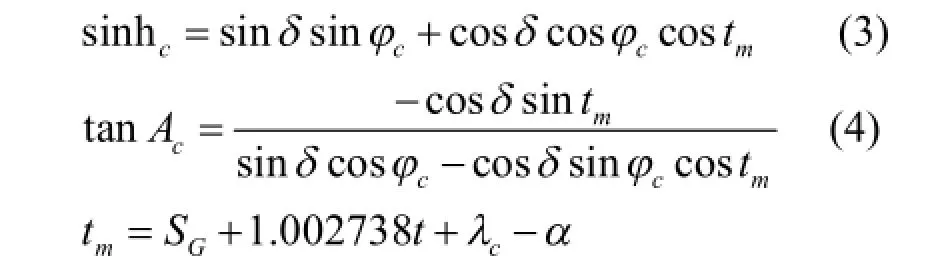
式中:α为星体的赤经,由自动星历表获得;δ为星体的赤纬,由自动星历表获得;φc为纬度,由惯导提供;λc为纬度,由惯导提供;t为世界时,由时间系统提供;SG为世界时零时的恒星时,由自动星历表获得。
1.3 由惯导平台坐标系测量星体的高度角hG和方位角Ap
惯导惯性平台平台坐标系模拟当地水平地理坐标系,为星体跟踪器提供水平测量基准。由于星体跟踪器通过驱动机构与惯导惯性平台连接,在观测某星体时,可以得到在平台坐标系内被观测星体的高度角hp和方位角Ap。
从式(2)和式(4)可以计算出惯导航向误差

2.4 基于ψ方程解算惯导姿态误差
2.4.1 ψ方程
由惯导原理可知,有如下关系式:

写成标量形式:

2.4.2 解算惯导姿态误差
由坐标变换可知,被观测星体投影在平台坐标系与计算机坐标系之间存在下列关系:


式(5)、式(12)、式(13)就是惯导姿态误差计算公式。
2 影响测量姿态误差的因素分析
从以上的分析和推导可以知道,影响姿态测量精度的因素比较多,主要有GPS的经纬度、惯导的经纬度、星体的赤经和赤纬,测量时刻的天文时、星体的跟踪精度等。其中,GPS的经纬度、星体的赤经和赤纬,测量时刻的天文时的精度均可以得到保证,误差忽略不计。
1)影响航向误差测量的主要因素是星体跟踪器的测量精度。现在一般使用CCD电荷耦合器件作为星体跟踪器的光电探测器,具有尺寸精确,像素单元不受外部环境影响,体积小,几何精度高,光谱范围宽等特点。星体跟踪器的精度与视场角、CCD噪声、电子线路噪声、A/D转换器的量化误差等有关。
2)影响水平姿态误差的主要是航向误差的测量精度,关键在于星体跟踪器的不水平度(即其垂轴的铅垂度)直接影响航向误差测量精度,另外只有航向误差的测量精度与水平角测量精度相当或还高时,才能求出精确的水平误差角。
3)在航向误差和水平姿态测量精度不可兼得的情况下,为了保证航向误差测量精度,可以适当牺牲水平姿态误差测量精度。
4)天文导航系统对被观测星体的选择有较高要求,包括亮度、高度角、相互间的夹角及其舰船所处的方位。星体高度角一般控制在15°~45°,星体间水平夹角一般控制在60°~120°。
3 结论
由于惯性导航系统的航向和水平姿态精度很高,要在动态情况下对它们作出一个正确的评价,对天文导航系统测量精度、可靠性提出了非常苛刻的要求。
[1] 金振山, 申功勋. 基于星体跟踪器的天文找北系统,中国惯性技术学报, 2003, 11(4): 23-26.
[2] 周罡, 唐建博, 邹志. 一种高精度的天文导航姿态与航向解算模型. 舰船科学技术, 2009, 31(5): 72-75.
[3] 惯性导航系统编写小组. 惯性导航系统. 北京: 国防工业出版社, 1983.
Inertial Navigation Attitude Error Calculation Base on Celestial Navigation
Li Jianfei1, Huang Yishun2, Han Kai1
( 1. Navy Submarine Academy, Qingdao 266042, Shandong, China; 2.Qingdao Navy Sailing Security Repair Plant, Qingdao 266044, Shandong, China)
In this paper, using celestial navigation and ψ equation, a method of measuring the inertial attitude error is proposed. Analysis results show that the method is simple and reliable, high measurement accuracy and practical.
celestial navigation; attitude; ψ equation; inertial navigation
TP911.23
A
1003-4862(2015)06-0060-03
2015-03-14
李践飞(1973-),男,硕士,讲师。研究方向:通信与信息工程。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
太阳能(2022年3期)2022-03-29
数学物理学报(2021年5期)2021-11-19
太阳能(2020年3期)2020-04-08
空间科学学报(2020年2期)2020-04-01
数学物理学报(2019年5期)2019-11-29
小学科学(2019年9期)2019-10-18
当代工人·精品C(2019年2期)2019-05-10
北京航空航天大学学报(2018年1期)2018-04-20
计算机应用与软件(2017年7期)2017-08-12
