双电机行星耦合驱动系统台架试验研究
2015-07-18 11:21武小花韩光伟2韩胜明
西华大学学报(自然科学版) 2015年2期
武小花,韩光伟2,韩胜明
(1. 西华大学交通与汽车工程学院,四川 成都 610039;2. 北京理工大学电动车辆国家工程实验室,北京 100083)
·新能源汽车与低碳运输·
双电机行星耦合驱动系统台架试验研究
武小花1,韩光伟2,韩胜明1
(1. 西华大学交通与汽车工程学院,四川 成都 610039;2. 北京理工大学电动车辆国家工程实验室,北京 100083)
为对双电机行星耦合驱动系统的力学特性和效率特性进行研究,搭建其试验平台,进行台架试验和数据分析。试验内容包括双电机行星耦合驱动系统输出外特性试验、单电机驱动模式和双电机耦合驱动模式的效率特性试验。测试结果表明,该试验平台能够实现对系统性能的有效测试,在满足车辆动力需求的前提下,双电机行星耦合驱动系统可有效提高动力传动系统高效区的范围。
电动汽车;耦合驱动;台架试验
目前车载能源有着较大的限制,高功率密度、高效率的大功率动力驱动系统成为了电动汽车的关键技术之一。国外动力耦合驱动系统大多采用行星齿轮耦合方式,其工作模式多样、变化灵活、功能完备、结构复杂、控制先进[1-3]。本文采用双电机行星耦合驱动形式,降低单台电机容量,有利于电机和机械传动向高转速方向发展,进一步提高电驱动系统的功率密度。双电机行星耦合驱动系统能够协调各电机的工作特性,优化各电机的工作区域,从而提高电动汽车的各项性能指标,它具有更大的节能潜力和更好的发展前景[4-5]。
1 系统结构及工作原理
本文研究的双电机行星耦合驱动系统结构如图1所示。双电机行星耦合驱动系统主要由动力耦合箱(主要包括1组简单行星齿轮机构和1个制动器B)、动力输入端的两台永磁同步电机(电机1与电机2)组成。行星机构的太阳轮轴与电机1转子通过花键连接;齿圈轮轴与电机2的转子通过花键相连;在耦合箱内有一制动器B,制动器B可动部分与齿圈轴相连,制动器B的固定部分与耦合箱箱体固连;行星架输出轴通过万向节传动轴与主减速器相连,输出动力。
在低速时,制动器B接合,齿圈锁止,电机1的动力通过太阳轮输入,行星架输出,实现大变比减速后大扭矩输出,满足车辆低速爬坡和加速大转矩的需求;在高速时,制动器B脱开,齿圈解锁,电机2与电机1通过行星机构实现转速耦合,共同驱动车辆。双电机行星耦合驱动系统属于多能源动力系统的范畴,电机1与电机2既可作为机械动力源驱动车辆,也可作为电动力源在制动时作为发电机运行。

图1 双电机行星耦合驱动系统结构图
2 试验平台的搭建
图2是双电机行星耦合驱动系统台架试验结构示意图,共分为4个部分,分别为试验对象、测功机及台架控制系统、基于DP256的软硬件平台综合控制单元、基于NI软硬件测试监控系统。图3为系统布置方案实物图。

图2 系统台架试验结构示意图

图3 系统布置方案实物图
试验对象包括电机1及控制器、电机2及控制器、行星齿轮耦合箱。驱动电机1和2均采用高效率、高功率密度额定功率60 kW的永磁同步电机,电机控制器通过CAN通信方式(波特率250 k)接收综合控制器的目标指令并进行控制,并将电机的实际转矩、转速以及故障状态等参数发送至CAN网络。行星齿轮耦合箱输出轴通过转速转矩传感器与测功机相连,太阳轮输入轴与电机1相连,齿圈输入轴与电机2相连。
测功机选用已有的电涡流测功机, 基本特性参数为: 最大转矩Tmax=3 000 N·m;最高功率Pmax=440 kW;最高转速nmax=6 500 r/min。控制方式包括自然控制、恒转速、恒转矩、比例控制、速度二次方控制等。
基于DP256的软硬件平台控制单元包括软件开发平台和硬件平台,其主要功能是接收驾驶员的踏板信号,实现对双电机行星耦合驱动系统的控制[6-7]。
基于NI软硬件的测试监控系统硬件部分包括传感器、PXI的数据采集卡、PXI的CAN卡,软件部分主要由LABview实现试验数据的采集、显示及存储[8-9]。
测试系统采用NI公司M系列多功能高速采集卡PXI-6259对电流、电压传感器输出的模拟信号进行实时采集。采用用于计数器测量和产生数字信号的PXI-6624采集卡对转速转矩传感器输出的数字信号进行实时采集。测试系统同时使用NI公司的PXI-8461对综合控制器、电机控制器的CAN信号进行实时监控。基于NI软硬件的测试监控系统如图4所示。
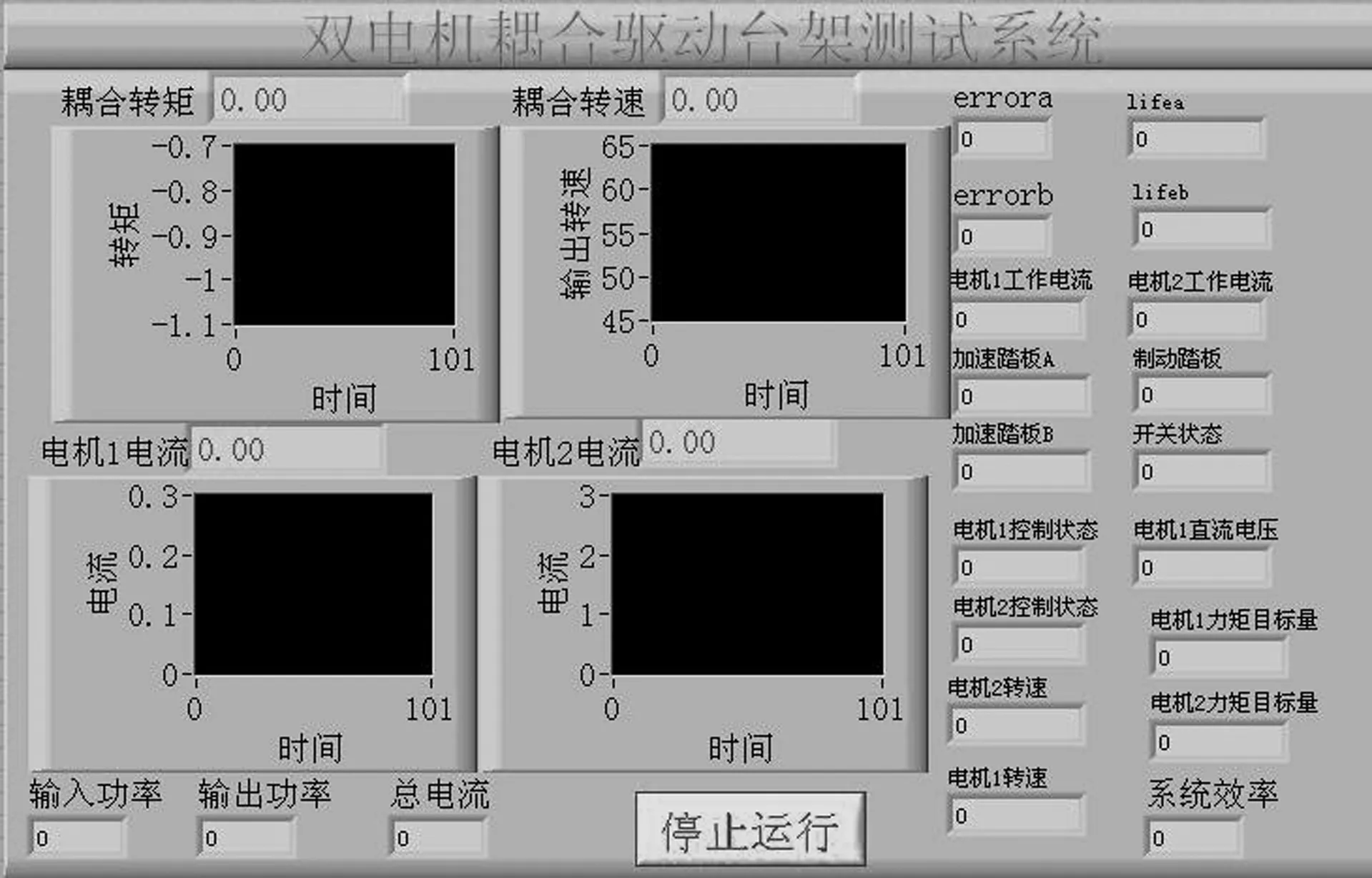
图4 基于NI软硬件的测试监控系统
为了考核系统的效率,在电机1、电机2控制器的输入端安装LEM高精度电流、电压传感器,通过对系统输入电流I、电压U的采集,得到系统总的电输入功率Pi,在耦合箱的输出轴与测功机间安装三晶JN-338系列的转速转矩传感器,通过对系统输出轴转速n、转矩T的测量,得到系统的机械输出功率Po,从而实现对系统效率η的分析。系统效率η的计算公式为

(1)
3 系统台架试验结果及分析
通过台架试验对双电机行星耦合驱动系统的性能进行测试,在测功机上分别进行双电机行星耦合驱动系统输出外特性试验、系统输出效率特性试验。试验结果表明,控制策略能够满足双电机行星耦合驱动系统的性能需求。
3.1系统外特性试验
电机1、电机2的峰值功率为110 kW,峰值转矩450 N·m,额定转速2 300 r/min,最大转速6 000 r/min,其外特性曲线如图5所示。双电机行星耦合驱动系统的外特性曲线如图6所示。由图可知,当耦合驱动系统输出转速小于690 r/min时,系统工作于单电机驱动模式,系统的最大驱动转矩为3 645 N·m,系统的最大驱动功率为110 kW;当系统输出转速在690 ~740 r/min之间,系统工作于模式切换区;当系统输出转速大于740 r/min时,系统工作于双电机耦合驱动模式,系统的最大驱动转矩为1 040 N·m,最大驱动功率为170 kW。

图5 电机外特性曲线

图6 双电机行星耦合驱动系统外特性曲线
3.2系统输出效率特性试验
在测功机上分别进行单电机驱动模式和双电机耦合驱动模式的效率特性试验和性能分析。从耦合箱零转速和零转矩输出开始,转速步长为100 r/min,转矩步长为50 N·m,同时测量双电机行星耦合驱动系统的输入总电流和总电压、输出转速和转矩,从而得到电输入功率Pi以及机械输出功率Po,并利用公式(1)计算系统效率,一直测量到系统的最高转速和最大转矩。最后利用Matlab软件样条函数spline插值分析驱动系统全工作域的效率分布情况,得出系统效率分布图。例如需测量耦合箱输出转速为1 000 r/min,转矩从零到最大值的效率分布时,首先设定测功机恒转速为1 000 r/min,逐步调节加速踏板强度,使输出转矩从零到最大值按设定的转矩步长递增。当输出转矩达到设定的目标转矩时,同时记录当前的转速n、转矩T、电流I和电压U,利用式(1)计算当前转速、转矩下的系统效率。
3.2.1 单电机驱动模式效率特性试验
当需要较大的驱动力时,双电机行星耦合驱动系统中的制动器B 将齿圈锁止,电机2关闭,电机1 把电能转化为机械能传递给行星齿轮机构的太阳轮,经行星齿轮由行星架输出。单电机驱动时系统效率分布如图7所示,由图可知:该模式下,当输出轴转速在150 r/min以下时,系统的效率低于80%,其对应的车速不超过4.5 km/h;当输出转速在150~700 r/min时,系统效率大于80%,对应的车速为4.5 ~20 km/h;当系统输出转矩小于1 000 N·m时,系统效率低于80%。

图7 单电机驱动系统效率分布图
3.2.2 双电机耦合驱动模式效率特性试验
当所需求的驱动功率较大、驱动力较小时,电机1单独驱动已不能满足高速大功率的需求,因此设计了高速双电机耦合驱动模式。在该模式下,制动器分离,电机1和电机2同时向行星机构输入动力,电机1 传递给太阳轮,电机2传递给齿圈,经行星齿轮传递给行星架输出动力。双电机耦合驱动时系统效率分布如图8所示。由图可知,当耦合箱输出转矩大于300 N·m时,系统的输出效率大于80%,由汽车理论可知,当车速大于20 km/h时,纯电动大客车所需的输出轴驱动力矩大于300 N·m,因此当车辆工作于双电机耦合驱动模式时,系统的工作域效率大于80%。

图8 双电机耦合驱动系统效率分布图
3.2.3 纯电动大客车驱动力效率分析
根据图7及图8,可以换算得到双电机行星耦合驱动的18 t纯电动大客车驱动力-车速效率分布,如图9所示,图中Ff+Fw为滚动阻力与风速阻力之和。当车速为0~11 km/h时,车辆可获得的最大驱动力为47 kN;当车速为11~20 km/h时,车辆可获得120 kW的恒定驱动功率;当车速为20 ~50 km/h时,车辆可获得的最大驱动力为13 kN;当车速为50~85 km/h时,车辆可获得170 kW的恒定驱动功率。车辆可获得的最大驱动力远远大于车辆的滚动阻力和空气阻力之和,具有较大的后备功率,有利于满足车辆加速和爬坡时较大驱动力的需求。
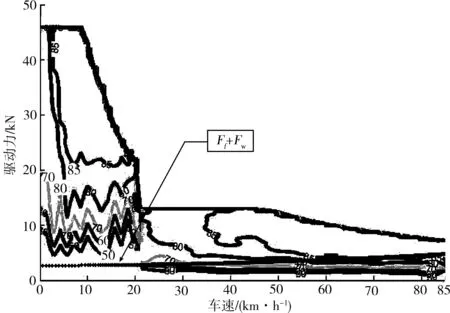
图9 纯电动大客车驱动力效率分布
4 结论
1)搭建了双电机行星耦合驱动系统台架试验平台,开发了基于DP256的软硬件平台以及基于NI软硬件的测试监控平台,面向实际的双电机行星耦合驱动系统,利用台架试验对不同工作模式下系统的效率特性进行测试。
2)分析了单电机驱动模式和双电机耦合驱动模式系统的效率特性。在满足纯电动大客车行驶需求的条件下,系统的效率大于80%的工作区域面积占系统总工作区域面积的85%以上。
[1]王志福,张承宁. 电动汽车电驱动理论与设计[M]. 北京:机械工业出版社,2012: 85-95.
[2]Miller J M, Everett M. An assessment of ultra-capacitors as the power cache in Toyota THS-II, GM-Allision AHS-2 and Ford FHS hybrid propulsion systems[C]// IEEE Applied Power Electronics Conference and Exhibition. Austin, TX:[s.n],2005: 481-490.
[3]高建平,何洪文,孙逢春. 混合动力电动汽车机电耦合系统归类分析[J].北京理工大学学报,2008,28(3):197-201.
[4]武小花,阴晓峰. 纯电动客车双电机耦合驱动系统控制策略研究[J].高技术通讯,2013,23(8): 863-867.
[5]WU Xiao-hua, Li Wei. Overview study of multi-dynamic coupling drive system on EV[C]// 2013 International Conference on Advanced Mechanical Engineering III (AME 2013).Wuhan:[s.n],2013:125-129.
[6]郭孔辉, 靳鹏, 张建伟. 基于MC9S12DP256 的燃料电池电动汽车整车控制器硬件研制[J]. 电子技术应用,2007(6):28-30.
[7]张亚宁,汪至中. 摩托罗拉16 位单片机MC9S12DP256 在汽车电子中的应用[J].国外电子元器件,2003(11):17-18.
[8]武小花,张承宁,李司光,等. 基于LabVIEW 的蓄电池充放电电流采集系统[J]. 电力电子技术,2010,44(6):80-81.
[9]杨乐平. LabVIEW程序设计与应用[M]. 北京:电子工业出版社,2004:84-385.
(编校:夏书林)
ResearchonBenchTestofDual-motorPlanetaryCoupledDriveSystem
WU Xiao-hua1, HAN Guang-wei2, HAN Sheng-ming1
(1.SchoolofTransportationandAutomotiveEngineering,XihuaUniversity,Chengdu610039China;2.NationalEngineeringLaboratoryforElectricVehicles,BeijingInstituteofTechnology,Beijing100083China)
In order to study the efficiency characteristics and mechanical properties of a dual-motor planetary coupled drive system, this paper develops a test platform for the drive system bench test and data analysis. Tests include external characteristic test of the system and output efficiency performance test during single motor drive mode and dual-motor coupling drive mode. The test results show that the test platform can effectively achieve the system performance test. While satisfying the vehicle driving power requirements, dual-motor planetary coupled drive system can effectively extend the range of power train efficiency zone.
electric vehicle; coupling driving; bench test
2014-02-18
四川省科技厅应用基础项目(2013JY0088);国家自然科学基金项目(51175040);四川省教育厅项目(12ZB320);西华大学基金项目(z1220315);2012年度西华大学省级重点实验室开放研究基金项目(szjj2012-012)。
武小花(1984—),女,讲师,博士,主要研究方向为电动汽车整车控制及多动力耦合技术。
U463.212
:A
:1673-159X(2015)02-0054-4
10.3969/j.issn.1673-159X.2015.02.011
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
汽车实用技术(2022年10期)2022-06-09
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年7期)2022-04-20
装备制造技术(2020年11期)2021-01-26
百科探秘·航空航天(2020年6期)2020-07-09
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
通信电源技术(2016年1期)2016-04-16
少儿科学周刊·儿童版(2016年1期)2016-03-14