烟草智能定量浇水机的研制
2015-07-18 19:18刘双喜范连祥李现道等
山东农业科学 2015年1期
刘双喜 范连祥 李现道等
摘要:为解决烟草种植过程中人工浇水成本高、劳动强度大、水资源浪费严重等问题,设计了一种基于ARM系统的烟草智能定量浇水机,该机可实现烟草的自动化定量浇水。烟草智能定量浇水机主要由行走系统、检测控制系统、光箱、电磁阀等组成。该机在行走系统作用下前进时,由摄像头检测垄上烟草位置,将采集的数据传递给ARM系统,ARM系统再向电磁阀控制电路输出一个控制信号,控制电磁阀打开,完成浇水作业。通过ARM系统中的程序控制电磁阀打开时间的长短,从而确定浇水量。试验结果表明,烟草智能定量浇水机的检测准确率为98%,浇水准确率为97%,效果能够满足烟草栽培管理的农艺要求。
关键词:烟草;浇水机;检测;控制;定量
中图分类号:S274.4 文献标识号:A 文章编号:1001-4942(2015)01-0124-06
Abstract In order to solve the problems present in tobacco planting process such as high cost of artificial watering, large labor intensity and serious waste of water resource, a kind of tobacco intelligent quantitative watering machine based on the ARM system was designed. This machine could complete the automatic and quantitative tobacco watering. This machine consists of walking system, detection and control system, light box and electromagnetic valve. When the watering machine moved forward controlled by the walking system, the camera detected the position of tobacco plant on the ridge and transferred the data to the ARM system, and then the ARM system outputted a control signal to the control circuit of electromagnetic valve to open the electromagnetic valve and complete the watering operation. The programs in the ARM system could determine the watering quantity by controlling the opening time of electromagnetic valve. The test results showed that the detection accuracy of tobacco intelligent quantitative watering machine reached to 98%, and the watering accuracy reached to 97%, so it could meet the agronomic requirements of tobacco cultivation.
Key words Tobacco; Watering machine; Detection; Control; Quantification
烟草是我国主要经济作物之一,种植烟草已成为增加农民收入和财政税收的重要组成部分[1]。在烟草的生长期间,水分直接影响着烟草的生长发育、生理生化代谢以及产量和品质[2~5],适时、适量的浇水是保证烟农获得高产、优质烟叶的重要环节。
目前,以美国、日本为代表的烟草生产技术发达国家,其烟草田间管理已基本实现高度机械化[6]。如美国移栽机公司(Mechanical Transplanter)生产的吊杯式膜上移栽机,作业时能完成膜上移栽、注水、覆土镇压等作业,由于对育草的要求低,因此在生产中得到了广泛应用;但由于采用四杆机构吊杯,机械结构复杂,成本高。加拿大研制的烟叶“转植机”可实现集挖穴、栽烟、浇水、施肥、封土为一体,但需要的人力较多。日本文明农机公司生产的AP—1型烟草田间管理车与其他配件组合后,可以较好地完成田间管理作业[7]。虽然国外的烟草种植机械化程度较高,但针对浇水这一项作业还没有专门的成品机械来完成。
我国的烟草机械还处在起步阶段,特别是在浇水这一环节费时费力,大多数地方还是以人工或畜力为主,机械化程度低,无法做到按需浇水,既浪费了水资源,又无法将浇水量控制在烟草生长所需要的最佳范围。因此,实现烟草的机械化、自动化浇水是保障烟农经济效益的有效措施。
针对这一现象,笔者研制出一种基于ARM控制系统的烟草智能定量浇水机,该机可实现烟草的自动化定量浇水。
1 整机结构与主要技术指标
1.1 整机结构
烟草智能定量浇水机采用自走式,主要由行走系统、检测控制系统、光箱、电磁阀等组成,总体结构如图1所示。光箱通过光箱悬挂架固定在浇水机后方,检测控制系统安装在光箱上方,储水罐固定在光箱后方中间位置,其底部与电磁阀相连。
1.2 工作原理
浇水前,首先调正烟草智能定量浇水机,使摄像头位于烟垄中心线正上方。调节光箱悬挂架使光箱在机器行进过程中不碰触烟草,且能隔绝外界大部分光线。endprint
烟草智能定量浇水机工作时,打开行走离合,变速箱将来自发动机的动力传递给行走机架,从而带动浇水机的前进。打开ARM系统开关和潜水泵开关,安装在ARM系统上的摄像头在行走过程中检测烟草位置,获取图像数据,然后将数据传递给ARM系统,ARM系统将摄像头取得的数据与原始设定的数据范围作比较,如果摄像头所获取的数据在所设定的数据范围内,则认为检测到烟草位置。此后ARM系统将向电磁阀控制电路输出一个持续时间固定的低电平信号,电磁阀控制电路接收到该信号后,电路中继电器电控开关闭合,电磁阀得电导通,开始浇水;当低电平信号结束后,继电器电控开关断开,电磁阀断电关闭,结束浇水。
浇水量可以通过电磁阀打开的时间长短来控制,电磁阀打开时间通过ARM系统中设定的程序控制。
1.3 主要技术指标
依据烟草浇水农艺和浇水机功能特征要求,确定智能烟草浇水机主要技术指标如表1所示。
2 主要部件设计和参数的确定
2.1 光箱
光箱是烟草智能定量浇水机的重要部件。浇水机工作时,光箱可以最大限度地屏蔽外界光线的干扰,防止外界光照强度的变化对图像的采集产生影响,为摄像头采集数据提供一个稳定的视觉采集环境。该部分主要由光箱外壳、灯条安置架和摄像头悬挂架组成。光箱外壳的形状和烟垄形状相似,其结构简图如图2所示。
光箱的高度可通过光箱悬挂架进行调节。光箱外壳由一个矩形顶面、两个矩形侧面和两个梯形侧面共五个板组成。光箱外壳顶面开有矩形孔,用以安装检测控制系统;两个梯形侧面底部中心开有限位孔,该限位孔用于防止浇水机行进过程中对烟草有所损伤。
在光箱的两个矩形侧面内部共固定着8个灯条安置架,用来固定LED灯条和漫射板,为图像的采集提供恒定光源,防止光线变化对图像的采集产生影响。8个LED白灯条采用并联的方式与12 V电源连接,所有负极接地。漫射板安装在灯条前端,用来稳定、均匀光源发出的光线,为数据的采集提供一个光照稳定、光线均匀的视场。灯条安置架截面简图如图3所示。
光箱顶部内侧焊接有实心圆柱形铁杆,将摄像头悬挂架上的套筒套入上述铁杆中,通过调节套筒的上下固定位置来调整摄像头悬挂架的高度,从而实现摄像头的高度调节。摄像头悬挂架上设有悬挂板,在悬挂板上开有多对摄像头固定孔,通过改变摄像头的固定位置来改变摄像头的前后位置,从而实现摄像头前后方向的调节。
作业时保证摄像头在烟垄中心的正上方,且与垄顶平面的垂直距离为10~15 cm,与电磁阀的水平距离为12~15 cm,从而保证获取大小合适的视场范围,确保浇水位置的准确性。摄像头悬挂架如图4所示。
2.2 检测控制系统
检测控制系统是烟草智能定量浇水机的核心部分,用以实现烟草位置的检测、电磁阀开闭的控制和浇水量大小的控制。
检测控制系统主要由摄像头、ARM系统和电磁阀控制电路组成,ARM系统型号为Real 6410,主频为667 M。检测控制系统固定在光箱顶部的检测控制系统安装口上。ARM系统和电磁阀控制电路由两个12 V电瓶串联后,通过电源转换模块将电压转换成5 V供电,所有负极接地。其工作流程如图5所示。
该浇水机选用百万像素面阵摄像头作为信号采集设备。工作时摄像头固定在光箱中的摄像头悬挂架上面,可实现摄像头前后方向和上下方向的位置调节,摄像头尾部通过数据线与ARM系统相连,并通过数据线将所获取的数据传递给ARM系统。
不同物质的颜色在图像中所表示的数据范围不相同。采用进入摄像头面阵视场的第一行图像(图6A)作为数据源进行分析,所得数据分布图如图6B所示。其中g代表某像素点G通道数值大小,b代表某像素点B通道数值大小,以g-b作为区分土壤和烟草的特征。可以看出,土壤在色彩分布中的数据范围为5~18,烟草在色彩分布中的数据范围为18~31。所以设定23~28作为代表烟草颜色的最终数据范围。
ARM系统接收到摄像头采集的图像数据后,对数据进行处理和分析,当所获取的数据在23~28范围内时,则认为检测到烟草位置,此时ARM系统通过GPIO口向电磁阀控制电路输出一个持续时间固定的低电平信号,以控制继电器中电控开关的闭合。通过设定的程序可以控制低电平信号持续时间的长短,从而确定继电器中电控开关的闭合时间和电磁阀打开时间。
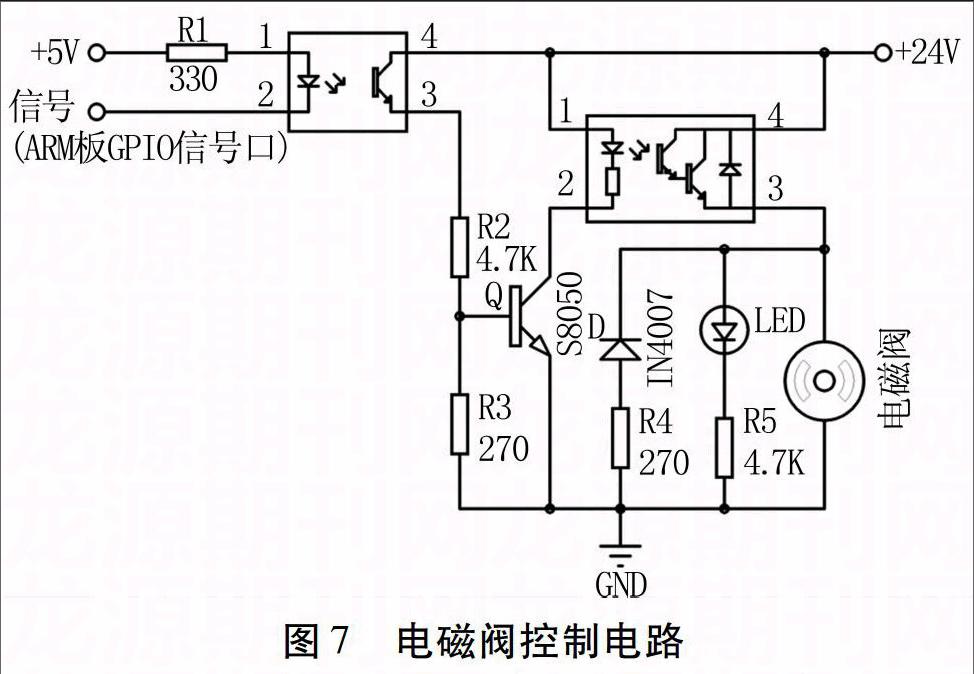
电磁阀控制电路用来控制电磁阀的打开和关闭,该电路原理图如图7所示。
当电磁阀控制电路接收到ARM系统发出的低电平信号后,通过光电耦合器使该信号完成“电—光—电”的转变,从而控制继电器中电控开关得电闭合,此时电磁阀得电导通,完成浇水。当低电平信号结束时,继电器中的电控开关打开,电磁阀关闭,结束浇水。
2.3 摄像头安装位置和浇水量的确定
摄像头与电磁阀的水平距离决定着浇水位置的准确性,该距离的确定与机器的行走速度和电磁阀的安装高度有关。
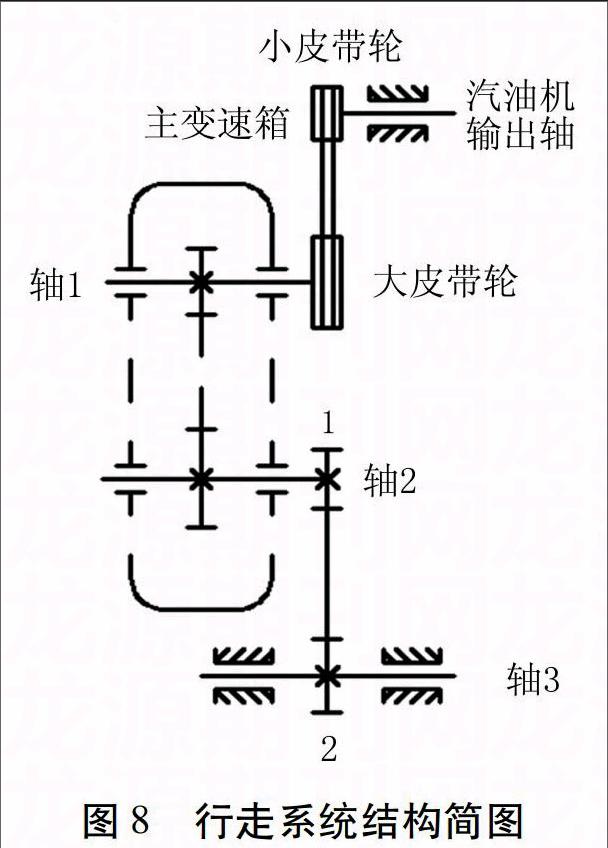
烟草智能定量浇水机的行走系统传动简图如图8所示。
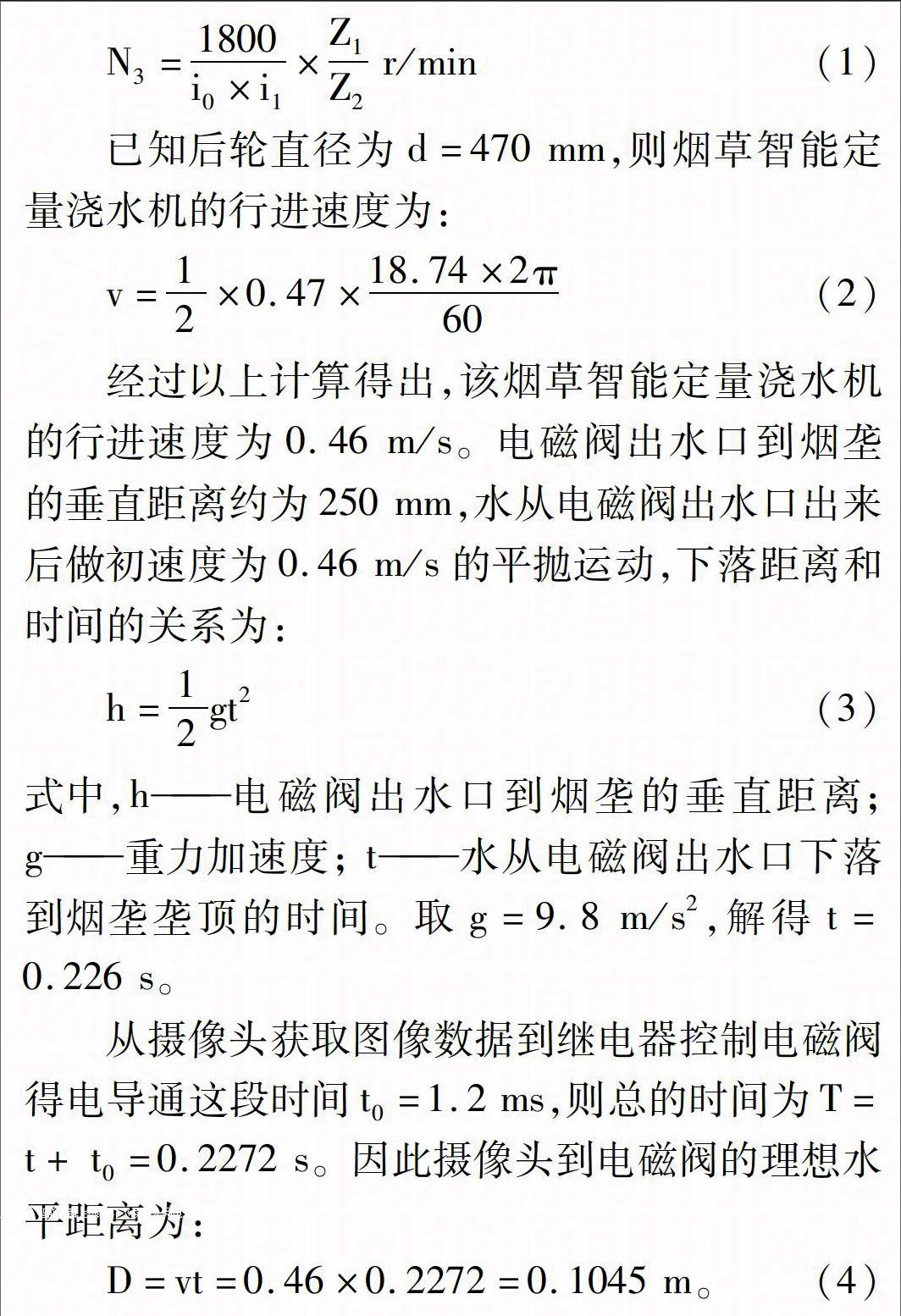
发动机将动力传递给变速箱,然后变速箱通过输出轴2将动力传递给行走轮轴3,从而带动浇水机前进。已知发动机和变速箱输入轴的传动比为i0,变速箱前进1档传动比为i1,发动机转速为1 800 r/min,齿轮齿数Z1=Z2=26,所以轴3的转速等于轴2的转速,为:
以最大浇水量为1 L为例,完成一次浇水作业的最大时间为1 s<1.09 s,所以在摄像头检测到下一株烟草前,浇水作业已经完成。当需要更大浇水量时,选用流量更大的潜水泵即可满足要求。
3 田间试验
3.1 试验条件
烟草智能定量浇水机(见图9)田间作业性能试验在山东农业大学烟田试验基地进行,试验用地为1.2 hm2,地表平整,试验条件如表2所示。endprint
3.2 试验结果与分析
试验过程中样机运转平稳,工作安全可靠,能够有效地完成自动化定量浇水,工作过程协调通畅,浇水量的大小和浇水位置满足农艺要求。采集1 000株样本进行分析,试验结果如表3所示,满足设计要求。
在试验过程中,偶尔出现不浇水或者浇水位置不准确现象,分析其原因有:①烟草生长异常,叶子变黄,导致检测数据出错。②烟草移栽时株距过小,导致检测控制系统处理时间不足。③机器行进过程中偶尔出现抖动现象,导致摄像头检测异常。
4 结论
(1)针对我国水资源短缺,烟草浇水机械化程度低等问题,设计出一种适用于烟草移栽后浇水的烟草智能定量浇水机,该机可完成自动化定量浇水,浇水量可根据季节情况调节。
(2)烟草智能定量浇水机的试验表明该机满足设计要求,作业性能稳定,运行平稳,噪声低,易于操作,安全和调整维护方便简单,作业效率和质量较高,是较理想的烟草浇水机。
(3)本设计有效解决人工浇水劳动强度大,成本高,浪费严重等问题,浇水准确率高达97%,作业过程中无伤草现象,浇水效果能够满足农艺要求。
参 考 文 献:
[1]陈恩名,朱志伟,张晓辉. 我国烟草田间生产机械化现状及发展对策[J]. 农机化研究, 2008 (10): 227-229.
[2]韩锦峰,汪耀富,钱晓刚,等. 烟草栽培生理[M]. 北京:中国农业出版社, 2003: 212-223.
[3]刘国顺. 烟草栽培学[M]. 北京:中国农业出版社, 2003:1-30.
[4]Yan J Q, Wang J, Tissue D, et al. Photsynthesis and seed production under water-deficit conditions in transgenic tobacco plants that overexpress an Arabidopsis ascorbate peroxidase gene[J]. Crop Science, 2003, 43 (4) :1477-1483.
[5]陈瑞泰. 中国烟草栽培学[M]. 上海: 上海科学技术出版社, 1987.
[6]张传斌. 我国烟草生产机械化的现状及思考[J]. 农业机械, 2009 (6): 66-67.
[7]尤泽清,吴正举. 日本烟草农业机械概况及我国发展设想[J]. 中国烟草科学,1998(2):32-34.
[8]孙景生, 康绍忠. 我国水资源利用现状与节水灌溉发展对策[J]. 农业工程学报, 2000, 16(2) : 1- 4.
[9]李宝筏.农业机械学[M].北京:中国农业出版社,2005.
[10]刘国顺.烟草栽培学[M].北京:中国农业出版社,2003:142-145.
[11]黄国友,刁朝强,陈雪,等.我国部分替代进口烟叶种植区域可行性分析[J].中国烟草科学,2008,29(4):25-29.
[12]荣廷昭,李晚忱.田间实验与统计分析[M].成都:四川大学出版社,2001.
[13]贾新文,伍雷刚.旱地烟田节水种植技术探讨[J].河南农业,2009(11):43-44.
[14]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 5262-2008 农业机械试验条件测定方法的一般规定[S].北京:中国标准出版社,2008.
[15]张贵明.简明农业机械设计标准应用手册[M].北京:机械工业出版社,1993.
[16]张建民.机电一体化系统设计[M].北京:北京理工大学出版社,2001.
[17]李红俊, 韩冀皖. 数字图像处理技术及其应用[J]. 计算机测量与控制,2002, 10 (9):620-622.
[18]Pratt W K. Digital Image Processing[M]. John Wiley & Sons,Inc.,1978.
[19]阮秋琦. 数字图像处理学[M]. 北京: 电子工业出版社, 2001.
[20]朱淼良. 计算机视觉[M]. 杭州:浙江大学出版社, 1998.
[21]王积分, 张新荣. 计算机图像识别[M]. 北京: 中国铁道出版社, 1988.
[22]陈义强, 刘国顺, 习红昂,等. 烟草栽培中土壤适宜含水率及施肥模型[J]. 农业工程学报, 2009,25(2):42-49.
[23]Bakker T, Wouters H, van Asselt K,et al.A vision based row detection system for sugar beet[J]. J. Comput. Electron. Agric., 2008,60(1):87-95.
[24]Robert P C.Precision agriculture:an information revolution in agrieuhure[J].Agriculture Outlook Forum,1999(4):1-5.
[25]Ni B, Paulsen M R, Reid J F. Corn kernel crown shape identification using image processing [J]. Transactions of the ASAE, 1996, 40(3): 833-838.
[26]Liu J, Paulsen M R. Corn whiteness measurement and classification using machine vision [J]. Transactions of the ASAE, 2000, 43(3):757-763.endprint
猜你喜欢
中学生数理化·高一版(2022年4期)2022-05-09
人物画报(2020年22期)2020-03-09
中学生数理化·高一版(2016年8期)2016-12-07
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
商界评论(2016年4期)2016-04-20
新民周刊(2014年22期)2014-06-24