
基于GPS的某型舰船姿态测量算法和天线布局研究
2015-07-22 22:07孙海文欧阳中辉杜亚杰
现代电子技术 2015年14期
孙海文+欧阳中辉+杜亚杰


摘 要: 利用载波相位GPS在舰船上进行GPS接收机布局设计和测姿实施过程中,如何快速求解出姿态角和布局GPS接收机来提高测量精度是当前研究的热点。在此采用直接法计算出舰船的姿态角,进一步通过分析基线长度研究GPS接收机的布局与舰船姿态测量精度的关系。首先介绍舰船测姿的基本概念及各坐标系之间的关系;然后通过直接法分析推导出测量航向角的模型,建立基线长度对测量精度的影响,从而得到基线越长,测角精度越高的结论。通过仿真试验进行验证,该结论为架设GPS接收机提高测角精度提供了参考依据。
关键字: 姿态测量; 直接法; 测量精度; 基线长度
中图分类号: TN98?34 文献标识码: A 文章编号: 1004?373X(2015)14?0042?03
0 引 言
利用载波相位技术进行定位是目前研究的热点话题,由于GPS L1载波波长很短为19 cm,载波相位测量噪声很小,因此测量精度高,所以可以达到很高的定位精度。对此许多人做了研究,并将此技术应用到姿态测量领域[1?3]。利用载波相位GPS进行测姿已逐渐应用于卫星、导弹、飞机、船舶、汽车等高动态载体上[4?6]。本文重点研究舰船姿态角的测量,尤其是航向角度的测量问题[7](船上的惯导设备可以提供符合要求的纵横摇角的精度)。对于姿态解算算法有很多,例如融合TRIAD算法[8]、四元数算法[9]、直接算法[10]等。直接算法是通过代数方法求解载体的姿态角,其优点是原理简单易懂,计算速度快,实时性好。
1 舰船测姿的基础概念
1.1 舰船姿态角定义
舰船姿态角[11?12]一般是指船舶甲板坐标系相对当地水平坐标系之间关系的角度,姿态角包括纵摇角(P)、横摇角(R)、航向角(Y)。用坐标系O?xyz来表示水平坐标系,姿态角定义如图1所示。
图1 姿态角示意图
舰船相对于水平坐标系x轴的相对旋转角度定义为纵摇角,右手定则x轴正方向沿着手指方向转为正,否则为负;y轴的相对旋转角度定义为横摇角,右手定则y轴正方向沿着手指方向转为正,否则为负;z轴的相对旋转角度定义为航向角,右手定则z轴正方向沿着手指方向转为正,否则为负。
1.2 舰船测姿的坐标系
(1) 地心地固坐标系。地心地固坐标系(ECEF)是非惯性坐标系,在地心惯性系中,它以地球自转的角速度旋转。如图2所示,地心地固坐标系的原点Oe位于地球质量中心,ze轴指向地球北极,xe轴指向地球赤道与本初子午线的交点,ye轴在赤道平面上,它与xe轴和ze轴构成右手直角坐标系。其下坐标用(xe,ye,ze)表示,该系统的实现称为协议地球参考框架(TRF)。GPS采用的WGS?84也是一个地球参考框架,经过几次更新它与地球参考框架(ITRF)即地心地固坐标系几乎一致。
图2 地心地固坐标系
(2) 当地水平坐标系。当地水平坐标系(LLS)的原点Ol定义为舰船摇摆运动中心在甲板上的投影点,xl轴平行于当地水平面指向东,yl轴平行于当地水平面指向北,zl轴垂直于Ol?xlyl平面指向上。xl轴,yl轴和zl轴组成右手坐标系,它的坐标用(xl,yl,zl)表示,如图3所示。
图3 当地水平坐标系
(3) 舰船甲板坐标系。如图4所示,舰船甲板坐标系原点Od位于舰船摇摆运动中心在甲板上的投影点;yd轴平行于舰船艏艉线指向舰尾,xd轴平行于舰船甲板且垂直于yd轴指向左舷,zd轴垂直于甲板平面指向上组成右手直角坐标系。该坐标系不是惯性坐标系,它随着舰船的六自由度运动而运动,其下坐标用(xd,yd,zd)表示。舰船甲板坐标系也是附体坐标系。
图4 舰船甲板坐标系示意图
2 测量航向角的方法
直接计算法是根据基线的当地水平坐标值和舰船甲板坐标值以及2个坐标系间的转换关系直接求解载体的姿态角,这里只求航向角。在船的艏艉安放GPS接收机,艉部的为基准站天线1,首部的为用户站天线2,假设船上按照图5所示,天线1和天线2之间的连线经过甲板坐标系原点且位于舰船甲板坐标系的y轴上。天线1和天线2之间的连线向量记作[L12],这条基线的长度和方向是可以精确测量的。
图5 甲板GPS架设示意图
直接计算法的具体计算流程如下:
(1) 根据GPS精密单点定位方式测量出基准站的地心坐标,同时利用GPS的载波相位差分方式测量出用户站相对于主天线在地心坐标系下的基线解:
[dXEE=dxE,2dyE,2dzE,2T] (1)
式中 [E]表示地心坐标系。
(2) 按照式(2)把式(1)的地心坐标系下的解转换成当地水平坐标系下的解:
[dXLL=Tel?dXEE] (2)
[Tel=-sinb0cosl0-sinb0sinl0cosb0-sinl0cosl00-cosb0cosl0-cosb0sinl0-sinb0] (3)
式中:l表示当地水平坐标系;l0和b0分别表示舰船甲板坐标系原点的经度和纬度。
(3) 根据转换关系(舰船甲板坐标系与当地水平坐标系之间):
[dXDD=Tld?dXLL] (4)
式中:D表示舰船甲板坐标系;Tld如下:
(4) 把基L12线的当地水平坐标系的解[dXLL=dxL,2dyL,2dzL,2T]和舰船甲板坐标系的解[dXDD=0L120T]同时代入式(4),得:
[dxL,2dyL,2dzL,2=L12cosPsinYcosPcosY sinP] (6)
由式(6)可解得:
[Y=arctandxL,2dyL,2] (7)
[P=arctandzL,2dx2L,2+dy2L,2] (8)
(3) 基线长度与测角精度的关系
对偏航角[Y=arctandxL,2dyL,2]进行微分,得到:
[dY=dyL,2ddxL,2-dxL,2ddyL,2dxL,2+dyL,2] (9)
航向角的方差为:
[σY=cos2Yσ2dxL,2-sin2Yσ2dyL,2L12cos P] (10)
式(10)化成不等式为:
[σY≤σmax(σdxL,2,σdyL,2)L12cos P] (11)
[σdxL,2,σdyL,2]就是GPS接收机的测距精度,统一用[σΔGPS]来表示,即式(11)表达为:
[σY≤σΔGPSL12cosP]
由上述公式分析可知,航向角的精度与定义航向的基线L12的长度成反比,即基线长度越长,精度越高,此结论只适用于短基线;与GPS测距精度成正比,即测距精度越高,测角精度越高。
3 仿真验证
给定GPS1的台体坐标,GPS1和GPS2接收机数据采用某型舰船航行的实测数据,GPS2的台体坐标取不同值进行仿真计算。
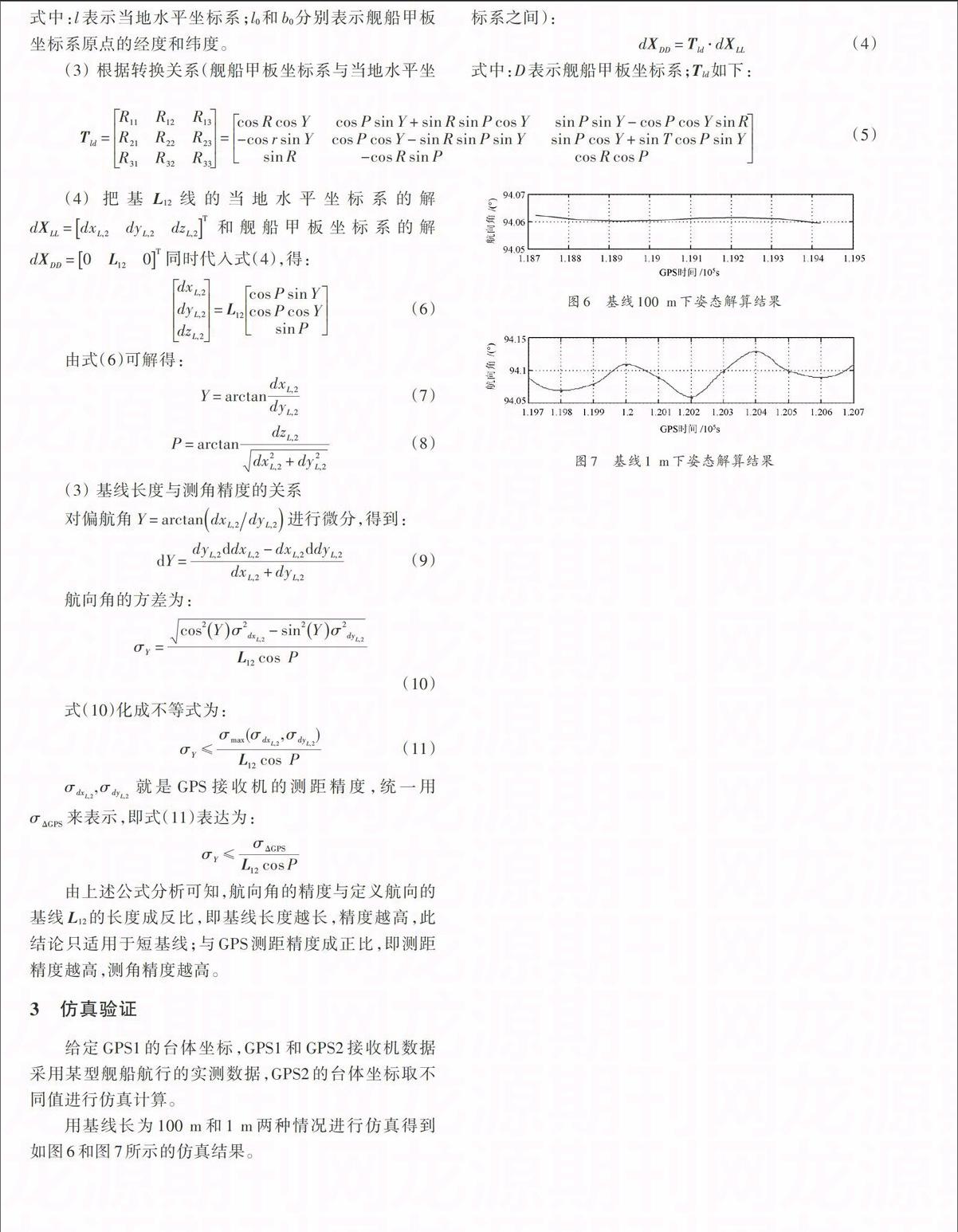
用基线长为100 m和1 m两种情况进行仿真得到如图6和图7所示的仿真结果。
图6 基线100 m下姿态解算结果
图7 基线1 m下姿态解算结果
由图6,图7可知,基线100 m条件下航向角的解算精度要明显优于基线为1 m的条件。从而说明基线越长,测角精度越高。
4 结 语
本文对直接法求解姿态角进行了公式推导,并对推导结果进一步分析,得出基线越长,测角精度越高,并通过仿真实验进行了验证。从而提出架设GPS接收机的方法即在船的艏艉架设,以保证基线的足够长度,提高航向角的测量精度。
参考文献
[1] 李跃,邱致和.导航与定位[M].北京:国防工业出版社,2008.
[2] ELLIOTT D K. Understanding GPS Principles and Applications [M]. [S.l.]: Artsch House, 1996.
[3] ZHU R, SUN D, ZHOU Z Y, et al. A linear fusion algorithm for attitude determination using low cost MEMS?based sensors [J]. Measurement, 2007, 40(3): 322?328.
[4] 韩慧群.GPS姿态测量系统研究与开发[D].哈尔滨:哈尔滨工程大学,2006.
[5] CHANG X W, YANG X, ZHOU T Y, et al. A modified Lambda method for integer least?squares estimation [J]. Journal of Geodesy, 2005, 79: 552?565.
[6] 黄显亮,温连峰,王强.基于多天线GPS舰船姿态测量系统研究[J].舰船电子工程,2009,29(12):80?82.
[7] 钟林,周海渊.测姿GPS系统在测量船上的应用[J].科学技术与工程,2013,13(3):642?644.
[8] 黎湧,吴宏鑫,刘良栋.融合TRIAD算法用于GPS姿态确定[J].中国空间科学技术,2000(2):30?35.
[9] SHUSTER M D, OH S D. Three?ax is attitude determination from vector observations [J].Journal of Guidance and Control, 1981, 4(1): 72?77.
[10] 李俊毅.GPS姿态测量及相关技术的研究[D].南京:信息工程大学,2004.
[11] 杨铁军,张晓玲,付毓生,等.基于DSP的GPS双天线实时姿态测量系统实现[J].电波科学学报,2002,17(6):661?665.
[12] 黄德武.GPS变形监测中多路径效应影响研究[D].成都:西南交通大学,2005.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船科学技术(2021年12期)2021-03-29
船舶标准化工程师(2020年1期)2020-06-12
民用飞机设计与研究(2019年4期)2019-05-21
国防(2017年12期)2017-04-09
电子制作(2017年24期)2017-02-02
反射疗法与康复医学(2017年7期)2017-01-16
舰船科学技术(2016年1期)2016-02-27
实用手外科杂志(2015年2期)2015-08-28
