无人机低空航摄系统在云南山区1:2000地形图测绘中的应用
2015-07-28 06:01万保峰云南省地矿测绘院昆明650218
山东工业技术 2015年11期
万保峰(云南省地矿测绘院, 昆明 650218)
无人机低空航摄系统在云南山区1:2000地形图测绘中的应用
万保峰
(云南省地矿测绘院, 昆明 650218)
摘 要:近年来,无人机低空航摄系统发展很快,已经逐步应用于测绘、国土、林业、环保、军事等众多领域。本文首先简要介绍无人机低空航摄系统的组成和作业流程,并通过实例验证无人机低空航摄系统测绘山区地形图的优势。
关键词:无人机低空航摄系统;数字线划图;正射影像图
0 引言
云南省是一个山区省份,其国土面积94%为山区,且高差比较大,植被茂盛,采用传统人工测量,效率较低,成本较高。随着全省经济建设的进一步发展,对地形图的需求更高。使用低空无人机航摄系统测地形图,作业效率可以显著提高,不仅仅能满足其精度要求,还能同时提供正射影像图和测区三维立体图,为后期各项工作的开展提供了扎实的基础。本文首先通过实例介绍无人机低空航摄系统测绘地形图的作业流程和关键技术,进而验证无人机低空航摄系统测绘山区地形图的优势。
1 无人机低空航摄系统组成
无人机低空航摄系统是以无人机为飞行平台,利用高分辨率相机系统获取遥感影像,利用空中和地面控制系统实现影像的自动拍摄和获取,同时实现航迹规划和监控、信息数据压缩和自动传输、影像预处理等功能,是具有高智能化程度、稳定可靠的,具有较强作业能力的低空遥感系统[1]。系统主要由飞行平台、自驾系统、航摄系统和后期相关处理软件组成。
1.1 飞行平台
本文所述无人机飞行平台为国遥万维公司生产的“快眼Ⅱ型”无人机,机长1.8 m,翼展2.3 m,机高0.49 m,安全飞行海拔高度不高于4500 m,续航时间约1.5h-2.0h,巡航速度为108 km/h,载重5 kg,起降方式为滑跑或者弹射伞降。
1.2 自驾系统
自驾系统采用普洛特无人飞行器科技有限公司的UP30飞控系统。该系统包含:机载飞控、地面站、通讯设备。作为无人机的飞行控制核心设备,其主要任务是利用GPS等导航定位信号,通过测定无人机在飞行中的俯仰、横滚、偏航、位置、速度、高度、空速等信息,以及接收处理地面发射的测控信息,对无人机进行数字化控制,控制无人机按照预定的航迹飞行,使其具有自主智能超视距飞行的能力。地面控制系统软件在无人机飞行前进行任务航线规划,在飞行过程中显示飞行区域的航迹、电子地图以及飞行参数和飞机的姿态等参数。飞行过程中,所有飞行参数和导航数据可实时下传。操作者可在地面计算机上监视飞行状态,可根据航迹规划和路径调整来控制各种任务的执行。
1.3 航拍摄像系统
无人机平台搭载的航摄仪有佳能5D MΑRK系列、尼康D800系列、飞思和哈苏等一系列航摄仪。但从安全和经济角度,市场上主要用佳能5D和尼康D800系列,镜头一般有:24mm、35mm和50mm定焦镜头。本项目采用佳能Canon EOS 5D Mark III和24 mm定焦镜头。
1.4 影像处理软件
目前市场上无人机影像处理的软件比较多,本项目影像后期处理软件采用武汉大学开发的DP-Grid低空航测数据处理系统软件,立体采集、编辑成图采用适普公司的全数字摄影测量 VirtuoZo和清华山维的EPS软件完成。
2 生产作业流程
低空无人机航摄系统作业流程分为航摄外业和内业数据处理。
2.1 航摄外业流程
与传统航测相同,低空无人机航摄同样需要进行航线设计、航摄飞行、质量检查、补飞或重飞、像控测量等步骤。所不同的是,无人机航摄的航线设计由于面积小,故无需考虑地球曲率的变化;航摄质量的检查在航摄现场就能完成。

图1 航摄外业作业流程
2.2 航摄内业流程
航摄内业流程如图2所示,其中DLG制作采用“先内后外”的作业方式。先内业后外业的作业流程是先在室内利用已有的影像对地物实行判读和采集,然后再把内业初步生成的DLG 成果叠加到DOM上制作调绘片,供外业到实地进行调绘,对内业的采集结果进行校对和更正,最后再对外业的成果进行整理编辑成图。

图2 航摄内业作业流程
3 应用实例
本文以宁洱县梅子乡中低产田改造项目地形图测绘为例,项目区最高点海拔1300 m,最低点海拔1000 m,地形比较复杂,植被主要以灌木、树林为主。项目区面积7平方公里。测区条件较复杂,采用传统测量技术,作业效率较低,所以采用无人机低空航摄系统进行。
3.1 像控测量
测区主要以树林和植被为主,不易选像控特征点,故采取先布设像控,后进行无人机航拍方式。像控点点位选取原则:选在地形相对平坦处;无障碍物和遮挡物;远离强电磁辐射源;交通方便,易于到达;点位易于制作像控标志,不宜被破坏;点位尽量布设在影像的六度重叠区域等[2]。像控点为石灰标志点,呈十字型,规格为0.2m×1.5m;像控点测量采用GPS-RΤK方式测量。项目区共布设70个点,其中50个点作为像控点,20个作为检查点。
3.2 无人机低空航摄
采用佳能Canon EOS 5D Mark III和24 mm定焦镜头,相机分辨率为2200万像素,影像幅面为:5760×3840 pixel,像元大小6.2μm。根据项目区地形,航摄设计为1个架次,相对航高600 m,拍照间距200 m,地面分辨率优于0.16 m。共获取有效原始影像650张。
3.3 数据后期处理
根据航飞的情况将数据分为3个测区进行处理,利用DP-grid软件和其它相关软件进行后期影像数据处理。空三加密精度,见表1。

表1 各测区基本定向点和检查点精度
绝对定向完成后,区域网平差结果基本定向点残差、检查点误差不大于表2规定。

表2 基本定向点残差/检查点误差最大限值
从以上两表可以看出,项目区域涉及的基本定向点和检查点中误差都小于表2的规定,绝对定向精度达到了1:2000正射影像图及1:2000数字线划图精度要求。
经过加密后的数据,导入VirtuoZo全数字摄影测量系统和清华山维采编一体化软件后,进行立体采集,然后进行野外调绘、补测、编辑,最终成图。
3.3 成果输出
通过以上步骤,最终输出DOM、DLG和三维立体图,如图3、4、5所示。
3.4 精度分析
最终成果精度检查采用GPS-RΤK和全站仪进行实地打点,平面精度检查点主要是特征明显地物点,高程精度检查点主要是道路交叉口、田坎交叉处、水沟沟底高程等,分布均匀,具有代表性。共检查平面位置点210个,中误差为0.45 m;高程点110个,中误差为0.57 m。通过以上检测看出,平面精度和高程精度均满足规范对1:2000地形图成图要求。

图3 DLG成果

图4 DOM成果
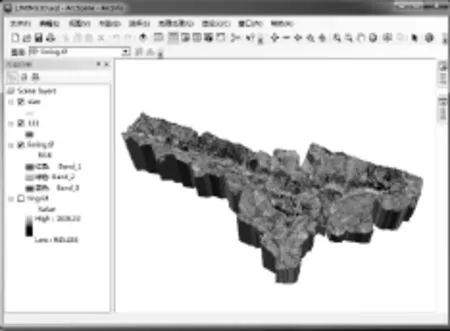
图5 三维立体成果
4 结束语
本文介绍了无人机低空航摄系统组成、作业流程及在云南山区地形图测绘项目中的应用,通过实例验证了无人机低空航摄系统在山区地形图测绘项目中的优势,得到如下结论:
(1)应用无人机低空航摄系统制作DLG可以满足1:2000数字地形图测绘要求。
(2)较传统测量技术,大大减少外业工作量,生产成本降低,作业效率提高。
(3)采用无人机低空航摄系统不仅仅能获得满足精度的地形图,还能获得正射影像图和三维立体图,为后期的规划设计等各环节提供了更为直观的基础资料。
参考文献:
[1]杨润书,吴亚鹏,李加明,万保峰.无人机航摄系统及应用前景[J].地矿测绘,2011,27(01):8-9.
[2]谢建春.利用无人飞艇获取的影像资料制作DOM的实践[J].山东省国土资源,2012,28(07):35-37.
作者简介:万保峰(1982-),男,山西长治人,硕士,主要研究方向:无人机低空航摄,摄影测量与遥感,三维数字城市。