
基于模糊控制的机械臂控制系统设计与实现
2015-08-07 13:39滕冠刘恒
大众科技 2015年1期
滕 冠 刘 恒
(柳州职业技术学院,广西 柳州 545006)
基于模糊控制的机械臂控制系统设计与实现
滕 冠 刘 恒
(柳州职业技术学院,广西 柳州 545006)
文章针对传统机械臂操作过程中存在的问题,设计一种解决机械手操作的控制系统,该系统能够适应机械手操作过程中灵活多样的轨迹路线和操作动作的应用需求。实现对机械手操作过程的精确控制,并能够根据机械手操作过程中所处的位置以及操作运动轨迹,实时的调整机械手的运动路线。
模糊控制;机械臂;路径规划
1 前言
2 设计思想
目前在现代化的工业制造领域,对机械手有着非常强大的应用需求。同时随着工业自动化水平的不断提高,对机械手操控的灵活性也提出了更高的要求。传统的机械手控制方法相对较为简单,最为典型的是通过在机械手的控制端预先设定控制程序,让机械手按照预先设定的运动模式进行操作控制。这种控制方式在装配和运行过程中控制的精度不高,而且随着机械手频繁的动作,可能会逐渐产生操作误差。由于这种控制方式在操作过程中,并没有对操作误差进行管理和控制,因此误差将会不断的被累计,最终使得机械手在操作过程中产生严重的偏差,甚至误操作。虽然目前随着计算机技术和自动化技术的不断发展,在机械手控制应用中逐步引入了一些自动化的控制方式,但总体上对机械手的控制方法和实现技术都难以满足目前对机械手灵活控制的应用需求。为了解决机械手的灵活控制问题,本文采用模拟仿真学的原理,在机械手上安装视频监控设备,通过视频监控设备采集机械手运动过程中的实时图像,对机械手的运动轨迹及运动位置进行精确的定位。将定位之后的结果由机械手控制装置,计算出机械手的实际运动位置,并与机械手初始的运动轨迹规划的结果进行对比,实现对机械手运动过程的精确控制。
模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。1965年由美国人L.A.Zadeh提出理论定义和基本架构,1974年,由英国人E.H.Mamdani通过模糊控制语句组成模糊控制器。模糊控制实质上是一种非线性控制,它既有系统化的理论,又有大量的实际应用背景,已经成为自动控制领域一个重要分支,PID控制器是目前应用于工业领域自动控制的非常重要的一个装置。本文引入的PID控制器包含了三种不同的控制方式,分别是比例控制器、积分控制器和微分控制器。应用PID控制器对被控系统实施控制的参数进行测量,计算当前控制的误差,在通过PID控制器内部三个不同的控制装置实现对应用系统的灵活控制目的,在PID内部的控制器中通过比例控制单元可以实现输出误差和控制给定量之间的线性变化关系,而通过积分控制器则可以实现对过去累计一段时间内的误差和给定量之间的控制关系的调节。利用微分控制器则可以预测出控制器未来可能的变化趋势,提前通过调节给定量实现PID控制器对机械臂的精确控制。
3 系统组成
本文提出的机械臂设计方案是以视频采集技术与模糊控制技术相结合的一种机械手控制方案。其对机械手控制过程中,首先通过视频采集设备获取机械手的精确位置,并将所获取的机械手运动过程坐标信息与机械手预先计算的初始路径规划坐标信息匹配,得到机械手在运动过程中的运动误差,由模糊控制器将运动误差做为输入信号,实现对机械手运动环节的微调。整个机械手的控制系统构成一个闭环系统,实现对运动过程持续不断的精确调整。根据实践需要,该系统内部包括视频采集模块、图像处理模块、机械手运动定位点匹配模块、运动差异计算模块、模糊控制器机械手运动驱动器、路径规划模块和运动目标位置输入模块等部分组成(如图1所示)。
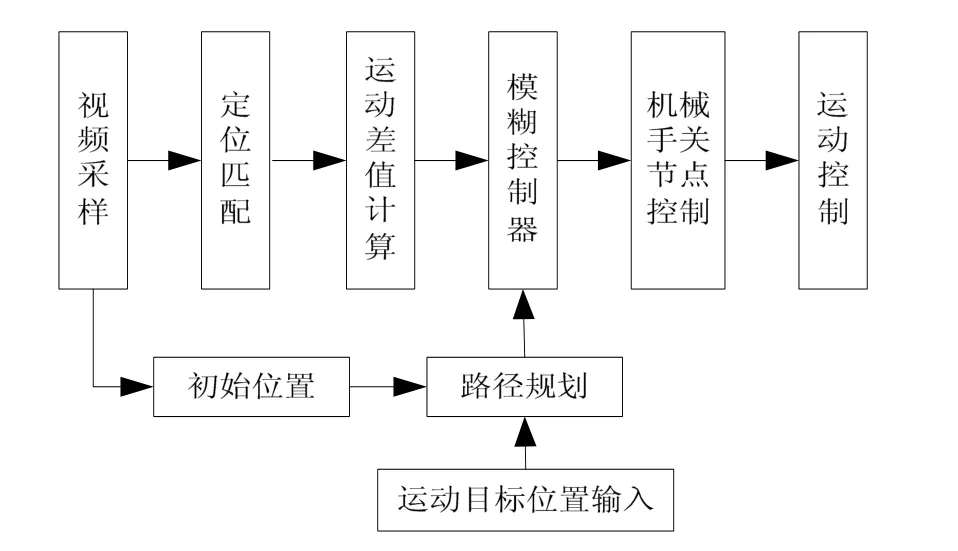
图1 机械手控制系统总体组成结构图
从图中可以看出,该系统是通过在机械手主要运动部件上安装摄像头,通过摄像头实时采集机械手运动过程中的视频图像信息,通过对视频图像的分析和处理,实现对机械手运动位置的精确定位。计算机械手的运动轨迹以及运动过程中所处的位置,与预先设定的轨迹路线是否一致。将运动过程中产生的运动轨迹差值送入模糊控制器中,由模糊控制器根据预先设定的模糊控制规则,对机械手运动轨迹做出模糊控制输出结果。并将控制结果送入机械手的运动驱动装置,调整机械手的运动方式,并改变机械手的运动轨迹路径,使得机械手的运动轨迹和运动所达到的目标位置与预期一致。利用这种基于视频图像的采集、分析和处理做为机械手的控制前提条件,设定模糊控制系统实现对机械手的运动过程的精确控制。
模糊控制器是系统的一个核心功能模块。其目的是实现对机械手运动过程中产生的误差进行处理,根据运动过程的差值输出机械手运动控制修正信号,将模糊控制器的模糊控制表如表1、表2所示。使用模糊控制器作为控制系统的核心部件,既能够实现对机械手运动过程的精确控制,同时又利用模糊控制器自有的模糊特性,能够很好的适应不同应用场景,不同结构特点的机械手在运动过程中的控制要求。

表1 运动速度模糊控制表
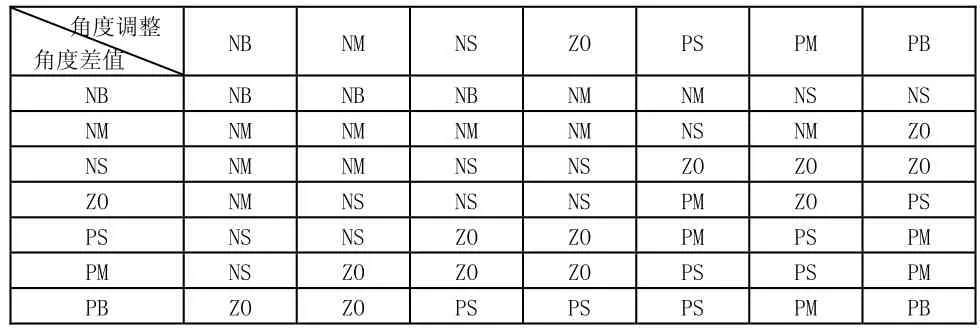
表2 运动角度模糊控制表
4 系统实现
在机械手运动过程中,首先接受外部输入的机械手运动目标位置,并由控制系统中的路径规划模块,计算出机械手预期的运动轨迹和运动过程。在计算机械手的初始运动轨迹规划时,还需要判定机械手是否处于初始的位置。如果是处于初始的位置,则直接从初始位置计算到目标位置的运动轨迹。如果机械手不是处于初始的位置,则通过视频采集设备获取机械手当前所处的位置坐标,计算出机械手在当前的初始位置,并计算出从当前位置的目标位置的路径规划。
其次,机械手根据计算得到的路径规划结果,对机械手的模糊控制器发出控制指令,并通过模糊控制器将控制命令及驱动信号发送至机械手的运动控制装置,实现对机械手的运动驱动过程。最后,在机械手运行过程中,由视频采集装置实时的采集机械手的运动状况,获取机械手在不同时刻所处的位置,并将其所采集到的图像经过图像处理,提取图像中的定位信号,将机械手的定位信号与路径规划的参考位置进行匹配,计算出运动过程中的运动差值。由机械手运动过程中的中间差值输入至模糊控制器,让模糊控制器根据机械手在不同时刻的运动状态,和运动过程中所产生的运动差值,产生相应的机械手运动控制信号,驱动机械手逐步实现精确的运动控制目的。
为了能够全面理解机械手典型的运动过程控制方法,下面对其具体流程进行详细描述(如图2所示):
第一步:用户确定机械手需要运动的目标位置,并将机械手的运动目标位置输入至机械手控制系统。机械手控制系统判断当前机械手所处的位置,如果当前机械手所处的位置为初始,则在进行路径规划时,机械手的起点位置为系统的初始位置。如果机械手的位置不是为初始位置,则通过视频采集设备获取机械手当前所处的位置,并得到机械手各运动节点的三维坐标值。
第二步:机械手控制系统运动内部集成的路径规划模块,对计算从起始位置坐标到运动目标位置坐标之间的路径,给出机械手在运动过程中各运动关节的全时段控制信号,以及各个运动关节在达到目标位置时,其各个关节节点的预期终至状态值,如各个关节的运动角度等信息。
第三步:机械手运动控制系统从路径规划的结果,提取机械手各个关节节点在不同时刻的运动控制信号,输入至机械手模糊控制器,并通过模糊控制器获取机械手的运动驱动信息,驱动机械手开始运动。
第四步:启动机械手上面自带的视频采集设备,并通过图像处理获取机械手各主要关节节点的位置及坐标信息。
第五步:获取图像中的定位点的坐标值,并由机械手的控制系统计算当前的机械手运动坐标值与路径规划中的运动坐标值之间的差值。将机械手运动过程中的定位坐标值的差值输入至模糊控制器,由模糊控制器产生控制信号,驱动机械手各关节节点,进行运动控制信号的调整。
第六步:机械手运动控制信号驱动机械手继续运动,并在运动过程中由视频采集设备不断的对机械手的运动过程进行监控,并将监控的结果产生机械手运动过程的运动控制调整信号。当机械手运动达到预定的目标位置时,由视频采集设备获取机械手各主要关节点的定位坐标值,并将该坐标值与路径规划中的坐标值进行匹配。如果二者之间的差值小于预先设定的范围,则向机械手运动控制装置发出运动终至的信号,机械手停止运动,完成机械手运动过程的控制任务。
5 总结
本文设计的机械手控制系统在进行控制过程中,通过视频摄像头实时的采集机械手的运动位置和运动轨迹,能够实现对机械手运动过程精确的监测,为机械手后续的控制任务提供了准确的信息。系统具有很好的实时性,从视频图像的采集到机械手运动过程控制是一个闭环系统,能够在机械手运动过程中,实时的进行采集与控制,能够具备较高的控制精度,也能够及时的发现机械手在运动过程中产生的各种较大的运动误差,并及时做出调整,做到机械手运动的全过程,都与预期规划的路径相一致。利用视频采集设备与模糊控制器的相互配合,以一种仿真的设计思路模拟了机械手的真实运动控制过程,而且通过对视频采集设备和模糊控制器的性能提升,大大提高了机械手运动控制灵活性和精度。

图2 机械手典型运动过程控制流程
[1] 陈益飞.RBF神经网络的PID控制研究与仿真[J].计算机仿真,2011,(4):212-215.
[2] 刘恒.数控曲面切割路径生成算法研究[J].制造业自动化, 2010,(12):65-67.
[3] 刘恒. 一种机械手精确控制系统及其方法: 中国, CN103744355A[P].2014-04-23.
[4] 张义,左为恒,林涛.BP神经网络PID控制在空调系统中的应用[J].计算机仿真,2011,(4):149-151.
Design and implementation of manipulator control system based on fuzzy control
The traditional process of manipulator operation problems to design a control system to solve the robot operation, the system is able to adapt to the needs of the application of mechanical processes-handed operation and flexible operation of the trajectory line operation. Accurate control of the hand operated mechanical process, and the process can be according to the mechanical operation of the hand as well as the location of the operating trajectory, real-time adjustment of the robot motion path.
Fuzzy control; manipulator; path planning
TP241
A
1008-1151(2015)01-0085-03
2014-12-12
2013年广西教育厅科研项目“基于嵌入式的机械臂控制系统设计”(2013YB353)。
滕冠(1973-),男,广西陆川人,柳州职业技术学院讲师,从事机电一体化方向研究;刘恒 (1975-),男,广西柳州人,柳州职业技术学院副教授,从事机电一体化方向研究。
猜你喜欢
制造技术与机床(2018年11期)2018-11-23
机械研究与应用(2018年3期)2018-07-11
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
装备制造技术(2016年12期)2016-02-23
电源技术(2015年11期)2015-08-22
