
基于新型故障搜寻策略的检测系统设计
2015-08-10 10:30范会来李成玉
电子设计工程 2015年15期
范会来,李成玉
(武汉军械士官学校 湖北 武汉 430075)
随着军事作战原则的发展和高新技术在军事装备中的广泛应用,武器装备的技术保障能力在部队的战斗力提升中占据了越来越重要的地位,已成为保证装备完好、运行安全可靠、形成作战能力的先决条件[1]。某型迫榴炮是一种新型装备,其各个部分普遍采用新技术,复杂度较高,使得其故障排除周期比较长,而目前配发部队的检测设备较少,且自动化程度较低,故障定位模糊,不能完全满足部队检测维修的需要。为此,研制具有生产成本小、自动化程度高、故障搜寻迅速、故障定位准确等优点的故障综合检测系统是十分必要的。
1 被测系统的故障特性与诊断方法选择
现代自动测试系统中所使用的故障诊断方法种类繁多,分类不一。按照一般的分类方法可大体分为定性分析的方法和定量分析的方法两大类[2]。评价故障诊断系统的优劣往往从故障诊断精度、故障诊断的速度、诊断系统的自适应性等方面。因此针对不同的被测试系统,根据被测系统的特性,合理选择故障诊断方法,以达到最好的诊断效果。
该被测系统具有以下3个鲜明特点:
1)故障传播的不丢失性
对故障诊断系统来说,这是能进行故障诊断的先决条件。即系统的某子系统、子功能或者元件发生故障后,会通过一定的故障征兆表现出来,并能被检测系统通过一定的技术手段检测到[3]。在一个非功能冗余系统(即系统中不存在为增强系统可靠性而特意设计的重复备份子设备),故障在传播过程中的丢失,说明这部分设备是设计上的冗余设备,这部分设备的好坏对系统没有作用。
2)有限个数的可测试节点,即可测试性上的黑箱问题
不管是运用哪种故障诊断方法,对系统理论上的故障分析往往是不考虑故障测试节点的位置以及个数的问题的,默认为可检测到最有利于得出故障原因的节点信息。但是在一个实际的系统中由于系统的封装或者检测要求,并不能测试理论分析中所需要的节点信息。在该被测系统中,只能通过箱体的外部插头来测试箱体内部的故障状态,而不能拆箱引出测试节点。
显然,被测系统结构原理上的非黑箱性使我们能够进行故障诊断,而可测试性的黑箱问题则在一定程度上决定了我们所能采用的故障诊断方法以及所能进行故障诊断的最大精确度或者详细度。所能测试的节点信息越多,故障诊断的精度和详细度越高。
3)故障特征的重叠性
对于连续系统,由于其输出的连续性,系统内部不同的故障源可能对于其输出所产生的故障特征也会不同。也就是基于这个特点,在故障征兆信息的特征提取时往往会采用信号处理的一些方法,如使用FFT、小波分解等方法提取故障征兆中所包含的特殊的故障信息,进而判断系统内部的故障源。
而对于数字系统,由于其输出的状态有限且不连续,使得系统内部的不同故障源所产生的故障特征一致,仅仅通过信号处理只能得出系统故障与否,而不能判断内部元件或设备的故障状态。
基于被测系统的以上3个特点,最终确定运用定性分析法中的故障树与专家系统相结合的故障诊断技术。最大限度的运用所能检测到的系统内部状态信息,实现对系统的故障诊断。
2 系统概述
现代新型装备为了提高整个系统的可靠性,往往采用模块化独立箱体式的分散检测与集中控制方法设计整个系统。根据武器系统的这个特征和需求方的检测要求,该检测系统为离线的独立箱体检测设备。围绕整个被测系统的控制核心箱体展开整体方案设计,研发了一套基于故障树分支搜寻的故障诊断系统[4]。该故障诊断系统为嵌入式系统,必须按照嵌入式的特点,选择恰当的故障诊断策略,优化故障搜寻算法,使其能够在嵌入式平台得到应用。
检测系统的工作流程如图1所示。
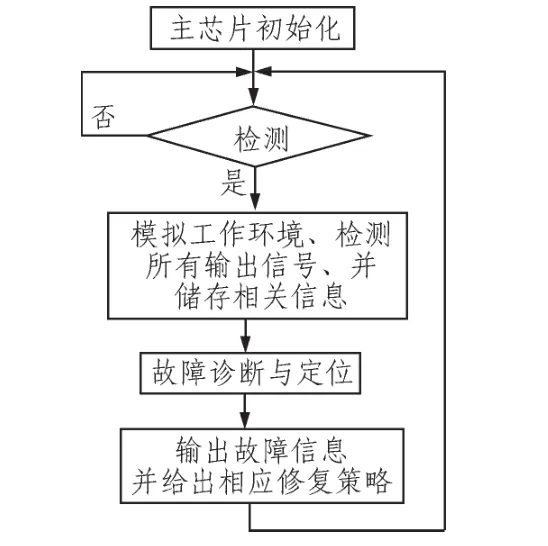
图1 系统工作流程图Fig.1 System work flow diagram
首先按照被测系统的正常工作流程模拟箱体外部工作环境,同时检测箱体的所有输出状态,根据检测到状态判断功能部件的故障状态;然后按照一定的故障搜寻算法进行故障诊断并搜寻故障源;最后将故障诊断显示给用户,给出故障修复建议,并保存相应的数据。
3 诊断系统的硬件结构
被测系统为以OMRON CPM2A系列PLC为核心的复杂逻辑控制电路,实现火炮射击联锁控制、供输弹联锁控制和随动系统调炮联锁控制等功能。为完成对系统的离线检测与故障诊断,设计了以STM32F系列处理器的检测平台,整体系统的硬件框图如图2所示。
检测系统以STM32F103VE系列处理器为控制运算的核心该芯片。STM32F103VE是专为手持设备和一般应用提供的高性价比的微控制器解决方案。采用了ARM 32-bit Cortex-M3核心架构,最高频率为72 MHz,有较强的运算处理能力和控制能力。具有丰富的片上资源:64K的SRAM、512K的Flash ROM、5个USART接口、USB接口、2个 12-bit DAC、3个 12-bit ADC、16个外部中断, 而且 STM32F103VE中集成了LCD控制器,可以将显示缓存中的数据传送到外部的LCD驱动电路中,非常适合嵌入式产品的开发。该处理器集成了众多功能模块,使得系统结构紧凑,减少了系统的复杂度,降低了开发成本。

图2 系统硬件结构图Fig.2 System hardware structure
由于检测平台涉及到了大量开关信号的检测与模拟,为了节省核心处理器资源,使处理器从复杂的外围电路控制中解脱出来,同时缩小检测板的体积,设计方案中使用XC9572XL系列CPLD作为逻辑时序控制核心。当接收到CPU的控制指令后,由CPLD完成芯片的选通以及数据的收发。
如图3所示,给出了CPLD的数据选择部分的内部原理设计图。利用XC9572XL系列CPLD,设计了24路锁存输出,其地址为0x00-0x17,32路缓冲输入,其地址为0x18-0x37。另外系统采集信号时需要同时采集两路的三通道信号的状态,设计了三通道的数据选择器,其地址为0x38-0x39。
由于CPLD具有ISP功能,并且其I/O端口可以通过开关阵列与任意的内部原理端口相连,方便的进行系统重构,大大减小了系统布线与调试的难度。
4 基于故障树分支结构的故障搜寻机制
4.1 故障树的过程性故障诊断推理
对故障树的节点关系的数学模型的分析可以得出如下的结论:
1)故障树或门结构的下一层事件中只要某一个底事件故障时,顶事件就会有故障;只有当或门结构的所有下一层底事件都正常时,顶事件才会正常[5]。
2)只有当故障树与门结构的所有下一层事件故障时,顶事件才会表现出故障状态。
可以根据上面的结论对于一个由或门和与门构成的故障树作如下的推理。
如图4所示的一个多层故障树模型。根据其数学模型分析,其顶事件 A 的最小割集为{E,F}、{G}、{C}、{H}、{K},其布尔形式表达为:

当顶事件A发生故障时,即A=1,首先对M2层的 B、C、D做出判断,因为C为底事件较为容易判断。只考察B和D的状态:
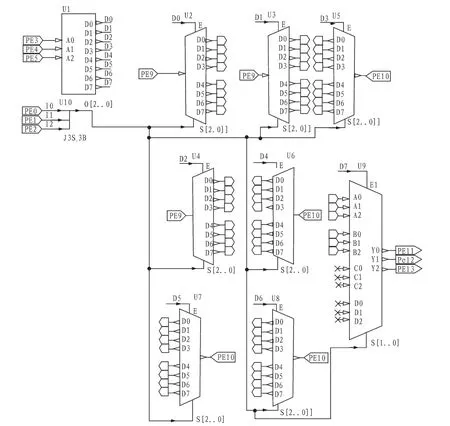
图3 CPLD数据通道设计原理图Fig.3 Data channel design principle diagram baed on CPLD
1)若B=0,D=0时,系统没有出现故障,不需要对任何节点测试。
2)若 B=1,D=0 时,则 E=1,F=1,G=0,H=0,K=0,需对 B的所有下一层子事件进行测试。
3)若 B=0,D=1 时,则 E,F 至少有一个为“0”,对系统故障无影响,可以不用测试;而G、H、K中至少有一个为“1”,需对D的所有下一层子事件进行测试。
4)若B=1,D=1时,则需要对B和D的所有下一层子节点进行测试。
3)从国家能源战略需求和电网发展现状出发,智能电网的建设应从电源侧智能化、电网侧智能化、配用电侧智能化和调度智能化四个层面来布局。其中,电网侧智能化建设已卓有成效,配用电侧智能化是未来智能电网建设的重点。
由上述4种情况可以得出:在“自上而下”的故障搜寻中,对凡是状态为“1”节点的下一层子节点进行测试,直到最底层底事件为止,就可以搜寻出导致系统故障的故障源,这种故障树的故障搜寻方法可以称为“寻1法”。寻“1”法的故障诊断原理依据是:在确定状态的非设计冗余系统中,故障传播的不丢失性。
4.2 寻1法与BDD技术
二元决策图(BDD)技术最早用于数字电路的简化分析和结构设计。作为一种新兴的分析工具,BDD技术已广泛应用于可靠性分析及故障诊断领域。基于Shannon分解定理的BDD技术能够直接实现故障树结构函数(本质为最小割集的并集形式)的不交化分解,而这种分析过程可以同时得到故障树的MCS。在故障树的分析中占有十分重要的地位。
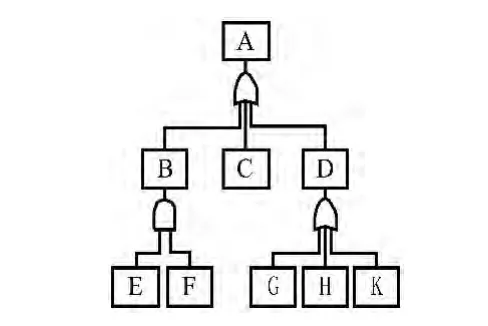
图4 多层故障树模型Fig.4 Multilayer fault tree model
对图4的所示的故障树进行BDD分析,选取个底事件的优先级为C 图5的BDD中A作为虚拟的故障树起点,在实际的BDD分析中不存在,这里仅作示意。要在一次故障搜寻中定位所有的非串联性的故障,必须对其所有可能导致系统故障的底事件组合进行故障判断。当顶事件A发生时,寻1法的故障搜寻策略,就是对故障树的所有可能的底事件组合进行判断,找出能够达到终结点“1”的底事件组合。这点与BDD在本质上是完全一致的,而且如果按照该故障树的最优BDD路径搜寻时,则为效率最高的搜寻路径。由图可以清楚得出导致系统故障的路径为{C}、{G}、{H}、{K}、{E,F}或者它们之间的组合。 图5 多层故障树的BDD图Fig.5 BDD of multilayer fault tree model 由于BDD中不存在中间节点,只考虑基本事件的影响,而进行实际故障搜寻时存在可测试的中间故障节点,如图4的D节点,当对C节点判断完成之后,若D=1,则可按照BDD的路径搜索;当D=0时,可以直接转为对E、F节点的测试,从而缩短搜索过程。因此寻1法可概括为基于BDD的在可测试中间节点的选择性故障搜索方法。通过某些可测试节点的确切的状态可以对整个搜寻路径进行删减或者优化,从而获得较高的诊断效率。 下面介绍使用该方法的一般步骤。 步骤二、简化已建立的故障树模型,将不可测试的和逻辑抽象的中间节点转化为底事件的集合。 步骤三、得出故障树的最优BDD,在可测试节点增加跳转条件,实现寻1法故障搜寻。 步骤四、对于不可测试的基本事件,我们采用模糊推理的方法,给出一个模糊诊断结论。 设备故障树化简的一般方法有两种:下行法与上行法[6]。上行法与下行法都是用于求解设备故障树模型最小割集的方法,但是由于我们已经可以得知较多的可测试节点的故障状态,可以直接利用这些信息来进行故障分析,大大减小故障树的规模,而不必求解全部的最小割集。因此我们这里只用这种方法来化简故障树。具体的化简方法可参照上行法与下行法的标准方法。 在运用BDD进行故障搜寻时,可对BDD基本结构元素,做如下描述: 1)分支连接的下层节点为非终结点,可称为检测下一结点状态; 2)分支连接的下层节点为终结点,若连接“1”,则成为该路集引起了顶层故障,意为找到了引起故障的一个底事件或者底事件组合;若连接“0”,则称该路集不会引起顶事件故障。 将图5所示的BDD诊断过程按照上述定义转化为计算机程序语言,在可测试的中间节点上加入分支判断,就得到了软件推理算法,从而实现了寻1法的故障搜寻策略。 本文根据被测系统所具有的故障诊断方面的特殊性,提出了新的故障诊断推理方法,能够很好的解决嵌入式平台的故障诊断系统开发问题,而且具有较高的诊断效果,并且对这种方法做了理论论证以及应用BDD技术对其优化。该方法具有一定的通用性,通过文章给出的一般性步骤可以解决类似系统的故障诊断问题。 [1]窦亚力.自行火炮炮控装置综合故障诊断系统设计[D].太原:中北大学,2011. [2]周东华,胡艳艳.动态系统的故障诊断技术[J].自动化学报,2009,35(6):748-758.ZHOU Dong-hua,HU Yan-yan.Fault diagnosis techniques for dynamic systems[J].Acta Automatic Sinica,2009,35(6):748-758. [3]刘成瑞,张庆振,任章.基于扩展故障树的运载火箭故障诊断专家系统[J].宇航学报,2008,29(6):1936-1942.LIU Cheng-rui,ZHANG Qing-zhen,REN Zhang.Fault diagnosis expert system for launch vehicle based on extend fault tree[J].Journal of Astronautics,2008,29(6):1936-1942. [4]朱大奇.航空电子设备故障诊断技术研究 [D].南京:南京航空航天大学,2002. [5]闵苹,童节娟,奚树人.利用二元决策图求解故障树的基本事件排序[J].清华大学学报:自然科学版,2005,45(12):1646-1649.MIN Ping,TONG Jie-juan,XI Shu-ren.Basic event ordering in fault tree analyses using binary decision diagram[J].Journal of Tsinghua University:Sciene and Technology,2005,45(12):1646-1649. [6]姚成玉,陈东宁.基于最小割集综合排序的液压系统故障定位方法[J].中国机械工程,2010,21(11):1357-1361.YAO Cheng-yu,CHEN Dong-ning.Fault localization method of hydraulic system based on minimum cut sets’comprehensive rank[J].Chian Mechanical Engineering,2010,21 (11):1357-1361. [7]潘强,孙必伟.模拟电路故障诊断中的特征信息提取[J].电子科技,2013(8):116-119,154.PAN Qiang,SUN Bi-wei.Fault diagnosis of analog circuits feature information extraction[J].Electronic Science and Technology,2013(8):116-119,154. [8]崔金魁,胡国兵,于新刚.模拟电路故障诊断的神经网络优化方法综述[J].电子科技,2014(2):134-137.CUI Jin-kui,HU Guo-bing,YU Xin-gang.Summary of neural network optimization method for analog circuit fault diagnosis[J].Electronic Science and Technology,2014(2):134-137.
4.3 基于寻1法的故障搜寻一般过程
5 结 论
猜你喜欢
农业工程学报(2022年10期)2022-08-22
机械工业标准化与质量(2022年6期)2022-08-12
一重技术(2021年5期)2022-01-18
国际眼科杂志(2021年9期)2021-09-15
装备制造技术(2020年2期)2020-12-14
铁路通信信号工程技术(2020年10期)2020-10-29
电子制作(2018年10期)2018-08-04
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
中国卫生(2015年12期)2015-11-10
电测与仪表(2015年8期)2015-04-09
