液压驱动伸缩式管道机器人设计
2015-08-26 00:54宋海强王述博沈阳新松机器人自动化股份有限公司辽宁沈阳110168
中国科技纵横 2015年8期
宋海强 王述博(沈阳新松机器人自动化股份有限公司,辽宁沈阳 110168)
液压驱动伸缩式管道机器人设计
宋海强王述博
(沈阳新松机器人自动化股份有限公司,辽宁沈阳 110168)
管道是物质和能源输送的重要工具之一,被广泛应用于核电、煤气、石油、医疗等多个领域。管道机器人作为一个运输工具广泛应用于管道的检测、维护等工作中。管道的检测对于提高产量和效率具有重要的作用,研制液压驱动伸缩式管道机器人装置对提高测井技术有着重要意义。文章介绍了一种液压驱动伸缩式的管道机器人的方案设计,相比其它的驱动方式具有更大的牵引力和牵引速度,希望能给从事本行业的同仁们一点参考依据。
液压驱动 伸缩式 管道机器人
在航空航天、国防、石油天然气、化工业、市政等领域中,管道机器人因具有可控性强、作业范围广等特点被广泛应用于各种管道内的机能动作实现、检测和维护等。目前国内外对管道机器人的研究较为广泛。大多数已实用的管道机器人多以电力驱动电机直接作为机器人的动力。在管道内径的限制条件下,特别是动作较多的机器人,必然需要每个动作都需要至少一个电机驱动,这往往导致机器人传动机构较为复杂,给设计、加工、装配等带来困难,从而带来成本的高昂和可靠性降低。国外现已有部分领域开始探索使用液压动力驱动机器人,不同的动作之间只需要简单的管线连接即可实现动力的传递,具有结构简单、可靠性高、便于控制等优点。
1 液压驱动伸缩式管道机器人技术现状
液压驱动伸缩式管道机器人的主要特征是设备本体携带微型液压站,为机器人的各个动作提供动力,实现前端抓靠—收缩—后端抓靠—前端放松—伸出的循环前进过程。目前国外几家公司已针对石油领域开发了几款液压驱动伸缩式管道机器人,并投入了实际使用,国内目前没有此类的研究应用。
Schlumberger公司伸缩式爬行管道牵引器系统外径为54mm,长度9.8m,速度为671m/h,牵引力大小为445kg。
Smartract公司伸缩式牵引器先后在加拿大和墨两哥湾进行了测井作业,不借助其他设备,其牵引距离接近12192m。其外径为54 mm,长9144mm.可用于双向操作,牵引力为454kg,牵引速度545m /h。
2 管道机器人设计
2.1管道机器人的组成和动作过程
管道机器人的组成如图1所示。
主要动作机构包括两个支撑三爪架和伸缩机构,其结构特点:(1)采用三爪臂,能自动定心,撑紧内壁:(2)采用独特的抓靠臂结构,三点离散与管壁结合。另外还包括提供动力的液压泵及其驱动电机、油箱、控制阀、结构本体等。
动作过程:前爪撑起与管壁接触固定——伸缩筒收缩,后半部分被拉向前面——后抓撑起,抵住管壁固定——前爪收回——伸缩筒伸出,前半部分被推出。依次循环,实现推进。
该机器人具有轻巧、牵引力大,对动力源功率需求小、地面设备紧凑、易于运输等优点。抓紧式的爬行方法有选择的与管擘间距接触,管内越障能力强;双方向(推/拉)驱动方式对接卡和长水平段起收电缆更具优势,代表了最先进的管道机器人的类型之一。
2.2主要设备的结构和工作原理
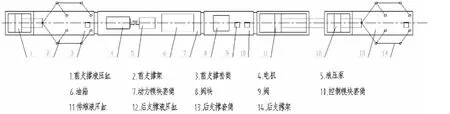
图1 管道机器人组成

图2 3爪支撑架
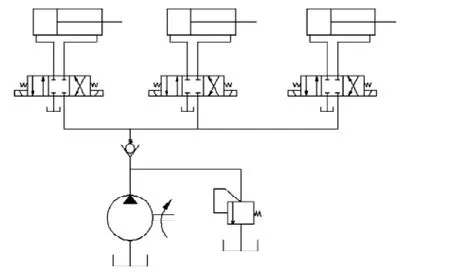
图3 液压原理图
支撑架是伸缩式机器人的主要动作部件,本设计采用三爪连杆机构,具有自动定心、强度高、刚度好的特点。在支撑液压缸的推杆的轴向运动驱使下,连杆机构的支撑梁做径向张开运动,并撑住管道内壁,在摩擦力的作用下为机器人前进提供支撑作用。支撑梁结构如图2所示。
如图3所示,液压泵从油箱中抽取液压油,经过单向阀,流经3个方向控制阀。3个方向控制阀分别控制前支撑液压缸、伸缩缸、后支撑液压缸。根据设定好的程序,三个油缸按照顺序动作,实现机器人的伸缩爬行。
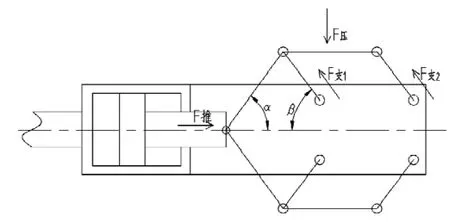
图4 支撑架油缸力分析
2.3设计计算
伸缩式管道机器人的主要参数体现在牵引力和爬行速度两方面。牵引力主要体现在伸缩油缸的拉力和支撑架的支撑力两方面。爬行速度则由伸缩油缸速度和实现支撑的时间决定。
2.3.1牵引力相关(油缸内径)计算
根据油缸推力公式,可以计算出伸缩油缸内径。

F拉:伸缩油缸拉力
R:油缸内径半径
P:液压压力
根据支撑架结构(图4),计算出支撑油缸推力,进而计算出支撑油缸内径。
将力按XY轴分解,得出力平衡方式如下:

另根据虚功原理,可得平衡方程:

F推:支撑油缸推力
F支1:支撑点1作用力
F支2:支撑点2作用力
F压:管壁压力,可根据要求的支撑力和管壁摩擦系数计算得出l:F推虚功位移
t:F压虚功位移
其中,根据固定的支撑架几何关系,在式4中,可最终把虚功位移相互抵消,最终由式2、式3、式4联合解出支撑油缸推力F推,再根据油缸推力公式得出油缸内径。
2.3.2爬行速度计算
机器人爬行周期包含伸缩油缸的伸缩动作和上/下支撑架的支撑动作,因为3个动作为顺序动作,所以一个运动周期的时间为三个动作时间的和。

T:1个运动周期的时间
t1:=伸缩油缸时间
t2:支撑架撑起时间
t3:支撑架收回时间
2.3.3伸缩油缸时间

L:液压泵额定流量
R:伸缩油缸内径
X:设定伸缩油缸行程
t2和t3的计算同伸缩油缸时间。
2.3.4机器人运行速度计算

V:机器人运行速度
4 结语
液压驱动伸缩式管道机器人由于其本身具有的大行程和牵引力的优点具有广阔的应用前景,开发出相应微型的大功率电机、高压大排量液压泵、控制阀块等元器件并实现标准化,是实现其及早国产化的主要方向。
[1]王兆龙,韩涛.拖拉机原理及其在水平井生产测井中的应用[J].国外测井技术,2006,21(6).
[2]王志刚,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社出版,2008.
[3]宋锦春.苏东海,张志伟.液压与气动传动[M].北京:科学出版社出版,2008.
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
橡塑技术与装备(2022年1期)2022-01-20
哈尔滨铁道科技(2020年3期)2021-01-18
哈尔滨轴承(2020年1期)2020-11-03
橡塑技术与装备(2018年18期)2018-09-22
分析化学(2017年12期)2017-12-25
物理与工程(2016年3期)2016-08-31
学习月刊(2015年1期)2015-07-11
天津医科大学学报(2015年3期)2015-06-05