
基于卡尔曼滤波模型的平地行走步频预测方法
2015-08-30 09:23王超方正余韬邓欣萍江建烽
哈尔滨工程大学学报 2015年8期
王超,方正,余韬,邓欣萍,江建烽
(厦门大学物理与机电工程学院,福建厦门361005)
步行是人类最基本也是最重要的动作部分之一,膝上截肢者需要借助人工膝关节才能重获自然步态。纯机械假肢已经无法满足人们的需求,与普通假肢相比智能下肢能根据外界条件变化和工作要求,自动调整假肢系统的参数,使其工作可靠,运动自如,具有更好的仿生性[1]。从事智能型假肢的研究工作要将智能控制技术、微电子技术、生物医学工程和康复医学工程等技术结合在一起,研制并开发出智能型机电假肢,使截肢者能以非常自然的步态行走,可让残疾人回归社会生活,改善生活质量,有着重大的社会意义[2]。目前智能仿生下肢面临的一个主要问题是如何控制,使其自动完成人体主观期望的动作,即如何实时地把人体将要进行的动作告知控制中心。为了实现这个目标,国内外的学者在智能下肢的控制上做了大量工作。采用合适的传感器获取人体运动生理信息是智能假肢控制的前提。利用与运动相关的控制量作为信息源,如:步长、足底压力、加速度、步态周期等。这类信息源可以直观地反应人体生理运动特性,容易采集,适合实时分析与控制[3]。也有采集与人体生物信息相关的物理量作为信息源,如:肌电与脑电等[4-5]。这类信息源相对物理信息而言较易受到外界干扰、鲁棒性差,其硬件与算法都比较复杂,目前难以被大多使用者接受。采集信息源之后,研究者们对信号进行滤波、学习、分类、预测等处理。大多学者使用人工神经网络等智能算法,需要反复迭代,适合离线分析与处理,不适合应用于实时处理系统[6]。
步频是步态的重要参数之一,足底压力是测量步态的有效的途径。智能膝关节的控制希望通过调整人工关节的阻尼使其自然摆动频率与实际步频匹配以达到最自然的步态。目前的主流控制策略都是步频跟随,滞后明显,在步频不稳定时会给使用者带来不适。本文针对目前下肢假肢的固有频率调节不能与实时步频同步,不能满足使用者希望在较大步速范围内变速行走以提高步行灵活性的需要这个问题,提出了一种基于足底压力传感及卡尔曼滤波的步频快速预测方法[7]。足底压力传感器用的是压敏电阻(FSR),通过比例电路把电阻变化转化为电压变化,然后用便携式模数转换 (ADC)模块采集数据。实验中在被测对象足底安放了4个压敏电阻,获得4组离线压力变化序列进行频域分析,选出其中最适合作步频计算的一个传感器。本文还根据卡尔曼预测思想针对步频变化过程设计了步频预测的数学模型,并结合同步视频和足底压力离线数据分析设计了模型系统误差和测量误差的计算方法。实验模拟日常生活平地行走步频变化,对4组实验数据进行分析,卡尔曼预测策略比跟随策略的后验偏差分别降低了 11.04%、12.65%、8.88%和 9.23%。
1 足底压力传感及步频信号采集系统
1.1 足底压力信号采集系统
步态周期总体可分为两个部分:支撑期和摆动期[8]。步态阶段的细分并不存在统一的标准,为了不同的研究目的,对步态周期的阶段划分标准多种多样。足底压力是步态研究的重要参数,它能对支持期的步态进行分析。基于足底压力的研究内容,把支撑期细分为4个不同的阶段。在支持相位每一瞬间都会有一个相对地面静止的转轴,不同的阶段分别有4个不同的轴心:足跟、脚踝、前足和足趾。为了有效区分这4个不同的阶段,足底需要安放4个压力传感器如图1所示,通过分压和运放电路把压敏电阻值转换为电压值。设RF为压敏电阻的阻值,RM为分压电阻的阻值,UCC为电源电压,则输出电压UOUT的计算见式 (1)。通过足底的压力分布即可判断出支撑期的细分阶段。

足底压力采集系统由传感鞋垫、转换电路以及模数转换采集模块3部分组成。传感鞋垫的核心部分是4个力敏电阻(FSR),它们安放位置分布见图1。力敏电阻是一种聚合体薄膜装置,施加在薄膜区域的压力能够转换成电阻值的变化,从而获得压力信息,压力越大,阻值越小。将其置于鞋垫里,可以感应人在走路时足底压力的分布变化[9]。转换电路将压力传感器受力以后电阻的变化转换为模拟电压的变化,为了在实验中方便观察,还设计了LED点灯指示,当压力达到设定阈值以上时LED会被点亮,低于该阈值LED则熄灭。由于无线传输有明显的延时,而且延时状况受距离和环境影响随机变化,会对数据分析带来干扰,因此实验数据采集用有线传输。模数转换采集模块选用MEASUREMENT COMPUTING公司的便携式多路模拟数据采集模块USB-1608G,可以用笔记本电脑在室内、外各种环境下采集数据[10],模数转换精度16 bits,采样频率范围0.027 9 Hz~250 kHz,能同时采集 8 路差分或者16路单极性模拟信号,可测电压范围±10 V。采集数据以EXCEL的格式记录在笔记本电脑的硬盘上,文件以数据储存的计算机时钟读数命名。图2为室外平地行走实验的照片,被测对象的左脚安放了压力检测鞋垫,测量者一人携带笔记本电脑和数据采集模块跟随运动。

图1 足底压力传感示意图Fig.1 Sensors under the foot

图2 户外实验照片Fig.2 Photo of outdoor experiment
1.2 步频测量
假肢的步频测量可以利用IMU(inertial measurement unit)、足底压力或者小腿管里加装力传感器。其中IMU的信号复杂,数据处理滤波去噪工作量大;小腿管里加力传感器的方法无法在健康人实验中实现。因此利用足底压力传感获取步频信息。步频测量可以融合4个传感器的信息综合计算,也可选用某个最佳的传感器作为频率计算的依据。多个传感器的信息融合可以有效屏蔽噪声,但是也可能丢失部分有用信息。为了利用足底压力传感获取较为准确的步频数据,实验环境限制在平地上,以避免因路况差异引起的步频测量偏差。在实验中发现不同部位传感波形区别明显,有的传感信息不适合作为步频计算依据,因此对比各个传感器的输出波形,并统计他们的频域特性,依此选择出一个最佳的传感器信号作为步频测量的原始数据。4个传感器的波形如图3所示。

图3 足底4个部位压力传感电压输出波形Fig.3 Voltage outputs from four sensors
为了更客观地从足底的4个传感器中选择最合适的一个作为步频计算的依据,把采集步态周期的整数倍信号进行计算,通过傅里叶变换把时域信号映射到频域:

式中:s表示单个传感器时域序列,N为时域序列的长度,S为傅里叶变换后的频域序列,n为时域序列的编号,k为频域序列的编号。图4显示的是包含11个步态周期的足底压力曲线变化。可以视k=11的信号为所需信号,其他信号为噪声,定义信噪比计算公式为
式中:「⏋表示向上取整。计算出来4个传感器的信噪比依次为 2.34%、10.23%、9.49%和6.25%,从定量分析的结果看,前脚掌外侧的传感器(图1中的2号传感器)最适合用于步频测量。
从时域信号波形看足跟部位的传感器杂波太大,不适合用于步频检测。足尖部位的传感器每一步中只有短时受力,若抬脚前足尖蹬地动作不显著时容易丢失步频信号,也不适合用于步频检测。前脚掌外侧的传感器和前脚掌内侧的传感器输出状况和实际支撑期和摆动期的时间分配比较匹配,其中前脚掌外侧的传感器输出信号的上升沿与下降沿更平直更陡峭,因而更适合用于步频检测。这与以上定量分析的结果相符。
2 步频预测数学建模
2.1 卡尔曼滤波的数学模型
卡尔曼滤波器是对随机信号的最优估计[11],而且在其滤波过程中涉及到通过k-1时刻的信号对k时刻的信号x(k)的预测[4,12]。随着步数k的变化x(k)构成一个离散的随机序列。可以假设待估随机信号的数学模型是一个由白噪声序列{w(k)}驱动的一阶递归过程,其动态方程为

测量过程的数学模型有白噪声{w(k)}扰动,其动态方程为

式中:a为状态转移参量,c为测量增益,均为常数。w(k-1)为过程噪声又名系统噪声,v(k)为测量噪声,他们的平方数学期望分别为与,均为常数。根据卡尔曼滤波公式:

其中预测增益方程:

计算起始条件可令x(1|0)=y(1),β(k)=0,根据式(5)~(7)即可得到下一个采样点随机信号的最优估计x(k+1|k)。
2.2 步频预测数学建模
本实验研究的随机变量x(k)为被测对象每一步的步频。用足底压力传感测量该随机变量,则系统的测量增益c=1,可令状态转移参数a=1。根据以上卡尔曼滤波器的递推理念,建立步频预测的数学模型如图4所示。
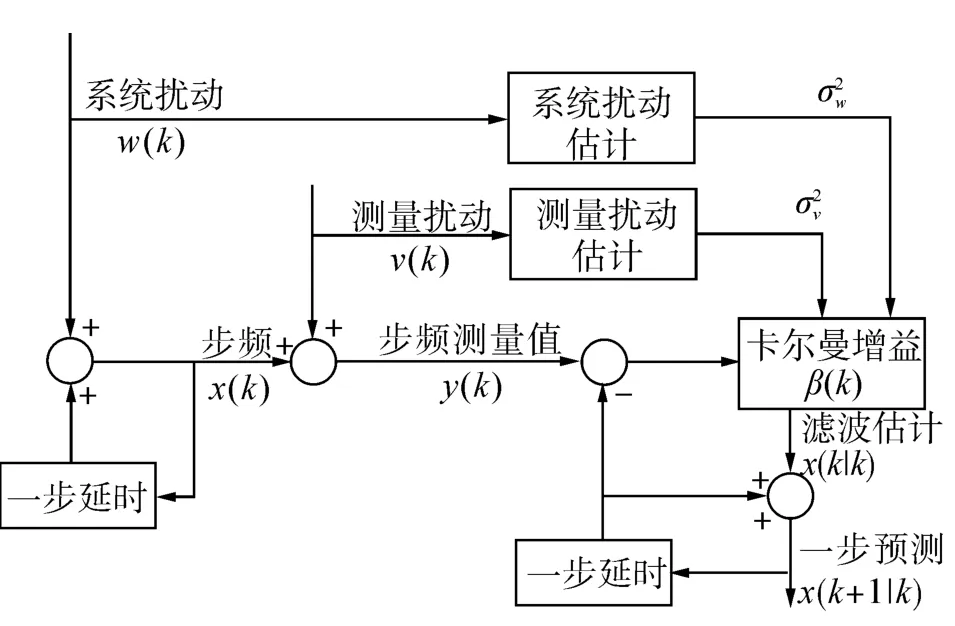
图4 步频预测系统模型Fig.4 Model of gait frequency prediction system
虽然人体的步频变化主要取决于大脑的步态规划,但是该模型仅仅把步频视为随机变量,简化了步频控制的数学模型,完全从观测值寻找步频变化规律,并进行预测。其中x(k)一步延时的结果为x(k-1),x(k+1|k)一步延时的结果为x(k|k-1)。
2.3 模型参数估计
该模型中有2个参数需要通过实验来估算,及系统噪声和测量噪声的平方数学期望σ2w和σv
2。其中系统噪声的测量方法为:
1)让被测对象在同一段距离的平地上以其自身习惯的慢速、中速和快速3种步频分别行走,用摄像机拍摄其行走的视频;
2)用视频播放器将画面逐帧播放,算出每相邻两次脚尖离地之间包含画面帧数,帧频已知,由此可以算出每一步的步频;
3)将这3组数据放在一起,利用式(8)求出系统误差。
式中:K为3组数据的总步数,f为3组数据步频的平均值。测量噪声的估计方法如下:
1)用数控机床FANUC Series oi Mate-MD按照被测对象步频慢速、中速和快速的3个平均频率分别点击步频检测所需的2号传感器,持续时间均为1 min;
2)用足底压力步频检测算法记录下测出的步频数据;
3)对这3种数据分别求测量方差,取他们的平均值为测量误差,如式(9)所示。式中M为测量总次数,下标i表示第i次测量的结果。

系统噪声需要统计步频信息没有采用足底压力传感的方法,这样可以有效避免测量噪声干扰系统噪声的计算值。
3 实验结果与讨论
被测对象为男性,年龄22岁,身高165 cm,体重50 kg,他在户外操场上直线运动,并模拟平常生活场景步行:先匀速平地行走,途中遇见熟人快速上前握手,寒暄后挥手告别继续前行,看到地面掉落物后减速,捡起该掉落物,再继续行走一段距离后停止。整个过程持续时间约1 min。若不用预测算法,常规的控制策略是假设下一步的步频与当前一步的相等,该方法被称为跟随策略。卡尔曼预测策略与跟随策略的优劣能以实测值与推断值之间的偏差的平方和为判断依据,如式(10)所示:

式中:N表示一次实验所完成的总步数,x(k)表示第k步的实际值,x(k|k-1)表示第k步的估计值。当使用跟随策略时,x(k|k-1)=x(k-1);当使用卡尔曼滤波策略时,x(k|k-1)是按照式(5)~(7)递推的结果。可定义第k步的估计偏差:

令跟随策略的单步估计偏差为ef(k),卡尔曼预测策略的单步估计偏差为ek(k),跟随策略的估计偏差平方和为Ef,卡尔曼预测策略的估计偏差平方和为Ek。
户外步频预测实验重复了4次,均为同一被测对象,实验结果如表1所示。平均步频约1 s左右,利用卡尔曼滤波比用跟随策略的偏差要降低10%左右。其中步频方差最大的为0.063 6,该实验预测算法的优化效果最好达到12.65%;步频方差最小的为0.011 3,该次实验预测算法的优化效果最不明显,仅为 8.88%。
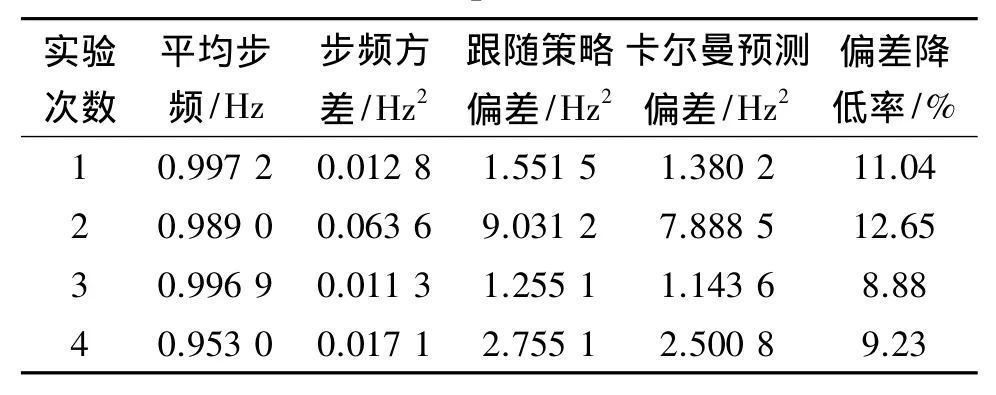
表1 实验结果Table 1 Experiment results
4 结束语
步态预测的最终目的是要用于智能下肢的实时控制,目前本文的研究还只是针对健康人的步态数据采集和离线数据处理。足底压力检测可以应用于残疾人也可应用于健康人体,具有很强的通用性。为了获得较为一致的足底压力数据,用以进行步频检测,把实验地形限制为平地,步态限制为平地行走。这样的限定可获取更可靠的检测数据,有利于验证预测算法的实用性。本文提出了一种基于足底压力传感的步频预测方法,通过卡尔曼预测算法对步频进行预测,能实现对智能假肢更有效的控制。每一次步频预测需要本次测量值和上一次的计算结果,每步运算包括式(4)~(7),合计5次加法和11次乘法,非常适合实时处理。
人的步态控制主要是由大脑控制,迈步之前早已由大脑规划好了,而本文的步频预测的数学建模中没有以人脑指令为系统输入,而是把步频视为有白噪声干扰的递归随机序列,完全从客观数据中需求统计规律,用以预测下一步的步频。根据实验结果可以认为,卡尔曼滤波相对于跟随策略能更有效地预测下一步的步频,步频变化越频繁,卡尔曼滤波的优化效果越明显。本文最后通过实验证明足底压力传感结合卡尔曼滤波对步频进行预测比进行步频跟随更加优越,而且卡尔曼滤波的实时预测的模型简单,内存和CPU资源占用小,只需要前一步的运算过程值和当前的测量值就可以预测后一步的频率,递推公式简单,很容易将其编写入智能假肢的实时控制程序中,有很好的应用前景。
[1]ZHANG Xiaorong,WANG Ding,YANG Qing,et al.An automatic and user-driven training method for locomotion mode recognition for artificial leg control[C]//Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society.San Diego,USA,2012:6116-6119.
[2]DEJNABADI H,JOLLES B M,AMINIAN K.A new approach for quantitative analysis of inter-joint coordination during gait[J].IEEE Transactions on Biomedical Engineering,2008,55(2):755-764.
[3]SUN Baiqing,SHEN Jinhu,ZHAO Qiancheng,et al.Gait detection and analysis based on omni-directional lower limb rehabilitation robot[C]//Proceedings of the 2012 IEEE/RSJ International Conference on Automatic Control and Artificial Intelligence(ACAI).Xiamen,China,2012:1102-1105.
[4]LIM H B,LUU T P,HOON K H,et al.Natural gait parameters prediction for gait rehabilitation via artificial neural network[C]//Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).Taipei,2010:5398-5403.
[5]ZHANG Tengyu,YANG Peng,LIU Qidong,et al.A research on EMG signal and plantar pressure information for AK prosthetic control[C]//Proceedings of the 7th Asian-Pacific Conference on Medical and Biological Engineering.Beijing,2008:488-491.
[6]ZHANG Feng,LI Pengfeng,HOU Zengguang,et al.An adaptive RBF neural network control strategy for lower limb rehabilitation robot[C]//Proceedings of the 3rd International Conference on Intelligent Robotics and Applications.Shanghai,China,2010:417-427.
[7]LIU Yuzhang,WANG Can,ZHENG Duan,et al.An ANN based approach for gait prediction of a lower-limb exoskeleton with plantar pressure sensors[C]//Proceedings of the 6th International Conference on Intelligent Robotics and Applications.Busan,Korea,2013:373-383.
[8]张令瑜,王岚,张立勋.基于多传感器的实时步态检测研究[J].哈尔滨工程大学学报,2007,28(2):218-221.ZHANG Lingyu,WANG Lan,ZHANG Lixun.Research on real-time gait phase measuring based on multi-sensor[J].Journal of Harbin Engineering University,2007,28(2):218-221.
[9]王明鑫,俞光荣,陈雁西,等.正常中国成年人足底压力分析[J].中国矫形外科杂志,2008,16(9):687-690.WANG Mingxin,YU Guangrong,CHEN Yanxi,et al.Analysis of the plantar pressure distribution of the normal Chinese adult[J].Orthopedic Journal of China,2008,16(9):687-690.
[10]张凯华,王兰美,李安国.基于LabVIEW的鞋垫式足底压力测试系统的设计与实现[J].传感器世界,2009,15(3):31-33.ZHANG Kaihua,WANG Lanmei,LI Anguo.The design and realization of the insole plantar pressure measurement system based on LabVIEW[J].Sensor World,2009,15(3):31-33.
[11]KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of Basic Engineering,1960,82(1):35-45.
[12]夏启军,孙优贤,周春晖.渐消卡尔曼滤波器的最佳自适应算法及其应用[J].自动化学报,1990,16(3):210-216.XIA Qijun,Sun Youxian,ZHOU Chunhui.An optimal adaptive algorithm for fading Kalman filter and its application[J].Acta Automatica Sinica,1990,16(3):210-216.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
体育世界(学术版)(2019年5期)2019-07-11
中国体育教练员(2019年1期)2019-04-18
电子制作(2019年23期)2019-02-23
体育科技文献通报(2019年2期)2019-02-14
体育科技(2018年4期)2018-12-04
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
北京航空航天大学学报(2017年9期)2017-12-18
中华骨与关节外科杂志(2016年3期)2016-05-17
